pytorch实现yolov3(1) yolov3基本原理
理解一个算法最好的就是实现它,对深度学习也一样,准备跟着https://blog.paperspace.com/how-to-implement-a-yolo-object-detector-in-pytorch/一点点地实现yolov3.达到熟悉yolov3和pytorch的目的.
这篇作为第一篇,讲yolov3基本原理.
卷积后的输出
经过basenet(darknet-53)不断的卷积以后得到一个feature map. 我们就用这个feature map来做预测.
比方说原始输入是416*416*3,一通卷积以后得到一个13*13*depth的feature map.
这个feature map的每一个cell都有其对应的感受野.(简单滴说:即当前cell的值受到原始图像的哪些pixel的影响).所以现在我们假设每个cell可以预测出一个boundingbox.boudingbox所框出的object的正中心落于当前cell.
You expect each cell of the feature map to predict an object through one of it's bounding boxes if the center of the object falls in the receptive field of that cell. (Receptive field is the region of the input image visible to the cell. Refer to the link on convolutional neural networks for further clarification).
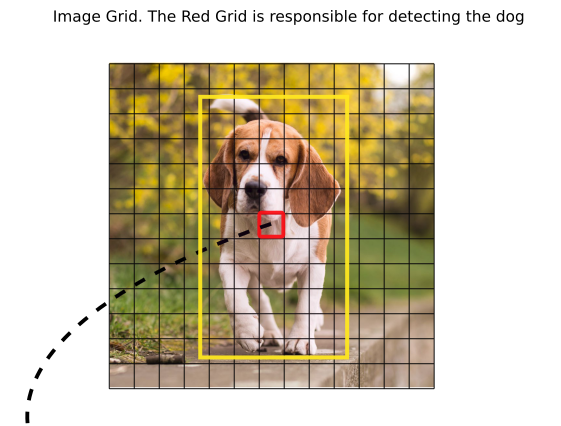
比如上图的红色cell负责预测狗这个object.
feature map的size为N*N*Depth,其中Depth=(B x (5 + C))

B指每个cell预测几个boundingbox. 5=4+1. 4代表用于预测boudingbox的四个值,1代表object score,代表这个boundingbox包含目标的概率,C代表要预测的类别个数.
如何计算predicted box的坐标
Anchor Boxes
anchor box是事先聚类出来的一组值.可以理解为最接近现实的object的宽,高.
yolov3中feature map的每一个cell都预测出3个bounding box.但是只选用与ground truth box的IOU最大的做预测.
预测

bx, by, bw, bh are the x,y center co-ordinates, width and height of our prediction. tx, ty, tw, th is what the network outputs. cx and cy are the top-left co-ordinates of the grid. pw and ph are anchors dimensions for the box.
- bx by bw bh是预测值 代表预测的bouding box的中心点坐标 宽 高
- tx, ty, tw, th 是卷积得到的feature map在depth方向的值
- cx,cy是当前cell左上角坐标
- pw,ph是事先聚类得到的anchors值
上图中的σ(tx)是sigmoid函数,以确保它的值在0-1之间.这样才能确保预测出来的坐标坐落在当前cell内.比如cell左上角是(6,6),center算出来是(0.4,0.7),那么预测的boudingbox的中心就是(6.4,6.7),如果算出来center是(1.2,0.7),那boundingbox的中心就落到了(7.2,6.7)了,就不再是当前cell了,这与我们的假设是相悖的.(我们假设当前cell是它负责预测的object的中心).

objectness score
这个也是由sigmoid限制到0-1之间,表示包含一个object的概率.
Class Confidences
表示当前object属于某一个class的概率. yolov3不再使用softmax得到.因为softmax默认是排他的.即一个object属于class1,就不可能属于class2. 但实际上一个object可能既属于women又属于person.
多尺度检测
yolov3借鉴了特征金字塔的概念,引入了多尺度检测,使得对小目标检测效果更好.
以416*416为例,一系列卷积以后得到13*13的feature map.这个feature map有比较丰富的语义信息,但是分辨率不行.所以通过upsample生成26*26,52*52的feature map,语义信息损失不大,分辨率又提高了,从而对小目标检测效果更好.
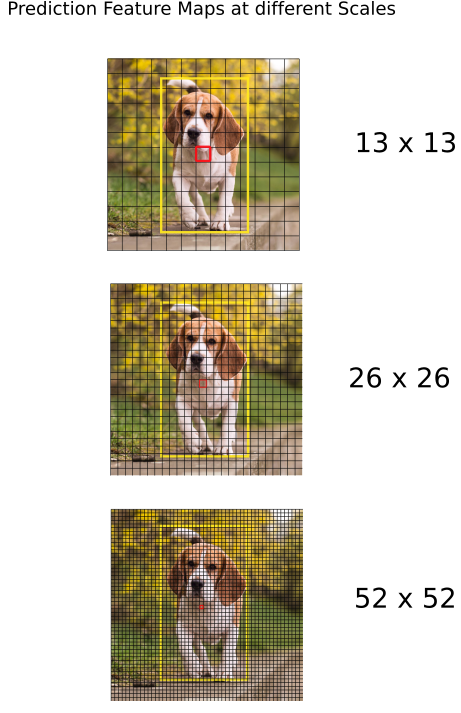
对416 x 416, 预测出((52 x 52) + (26 x 26) + 13 x 13)) x 3 = 10647个bounding boxes.通过object score排序,滤掉score过低的,再通过nms逐步确定最终的bounding box.
nms解释看下这个https://blog.csdn.net/zchang81/article/details/70211851.
简单滴说就是每一轮都标记出一个score最高的,把和最高的这个box类似的box去掉,循环反复,最终就得到了最终的box.
refrence:https://blog.paperspace.com/how-to-implement-a-yolo-object-detector-in-pytorch/
pytorch实现yolov3(1) yolov3基本原理的更多相关文章
- 目标检测-基于Pytorch实现Yolov3(1)- 搭建模型
原文地址:https://www.cnblogs.com/jacklu/p/9853599.html 本人前段时间在T厂做了目标检测的项目,对一些目标检测框架也有了一定理解.其中Yolov3速度非常快 ...
- pytorch实现yolov3(2) 配置文件解析及各layer生成
配置文件 配置文件yolov3.cfg定义了网络的结构 .... [convolutional] batch_normalize=1 filters=64 size=3 stride=2 pad=1 ...
- pytorch版yolov3训练自己数据集
目录 1. 环境搭建 2. 数据集构建 3. 训练模型 4. 测试模型 5. 评估模型 6. 可视化 7. 高级进阶-网络结构更改 1. 环境搭建 将github库download下来. git cl ...
- yolov3 in PyTorch
https://github.com/ultralytics/yolov3 Introduction简介 This directory contains PyTorch YOLOv3 software ...
- 万字长文,以代码的思想去详细讲解yolov3算法的实现原理和训练过程,Visdrone数据集实战训练
以代码的思想去详细讲解yolov3算法的实现原理和训练过程,并教使用visdrone2019数据集和自己制作数据集两种方式去训练自己的pytorch搭建的yolov3模型,吐血整理万字长文,纯属干货 ...
- GPU端到端目标检测YOLOV3全过程(下)
GPU端到端目标检测YOLOV3全过程(下) Ubuntu18.04系统下最新版GPU环境配置 安装显卡驱动 安装Cuda 10.0 安装cuDNN 1.安装显卡驱动 (1)这里采用的是PPA源的安装 ...
- 适用于Windows和Linux的Yolo-v3和Yolo-v2(上)
适用于Windows和Linux的Yolo-v3和Yolo-v2(上) https://github.com/eric-erki/darknetAB (用于对象检测的神经网络)-Tensor Core ...
- 模型转换[yolov3模型在keras与darknet之间转换]
首先借助qqwweee/keras-yolo3中的convert.py和tensorrt例子yolov3_onnx,并重新编写了代码,实现将darknet格式的yolov3的yolov3.cfg和yo ...
- yolov3和darknet opencv版编译安装及基本测试
版权声明:本文为博主原创文章,欢迎转载,并请注明出处.联系方式:460356155@qq.com 一.准备工作: 安装pkg-config:sudo apt-get install pkg-confi ...
随机推荐
- 关于babel和babel-polyfill
使用babel-cli命令babel xx -d xx把一个js文件转成了ES5的,并在package.json里加了"babel-polyfill": "^6.23.0 ...
- DOS批处理
DOS批处理命令-注释 注释是每个程序中不可或缺的(不是对计算机来说,而是对我们这些程序员阅读代码来说) 语法: ①rem 这是批处理的注释命令,rem后面的内容全部是注释 例:rem 这是一行注 ...
- 接口测试——fiddler对soapui请求返回信息抓取
原文:接口测试——fiddler对soapui请求返回信息抓取 背景:接口测试的时候,需要对接口的请求和返回信息进行查阅或者修改请求信息,可利用fiddler抓包工具对soapui的请求数据进行抓取或 ...
- linux的各个子系统
Linux基本的子系统主要有CPU.Memory.IO.Network. 在这些子系统中,它们之间相互之间高度依赖.不论什么一个子系统的高负载都会引起其它子系统出现故障. 比如: 大量的页调入请求对内 ...
- Git学习笔记(两)
删除文件 假设需要从Git删除文件,我们必须从删除列表中的跟踪文件(从临时区域中删除).然后提交.可以使用git rm工作订单完成.联合司令部从工作区删除指定的文件.以后就不会出如今未跟踪文件清单中. ...
- Tab选项卡界面(1)
Tab用一个简单的应用程序接口的标签是集中的界面布局文件的同一页上的接口组件不同的标签.并计划将在主类集中的代码文件.这种方法的优点是,文件在项目数不会被添加,但是,假设Tab接口组件更个性化的标签. ...
- react项目实践——(4)依赖安装与配置
1. 修改package.json,添加需要安装的包 { "name": "myapp", "version": "1.0.0&q ...
- WPF 四种尺寸单位
原文:WPF 四种尺寸单位 像素 px 默认单位可以省略 厘米cm 英寸 in 点 pt 1in = 96px 1cm=96/2.42px 1pt=96/72px
- 大数据_zookeeper环境搭建中的几个坑
文章目录 [] Zookeeper简介 关于zk的介绍, zk的paxos算法, 网上已经有各位大神在写了, 本文主要写我在搭建过程中的几个极有可能遇到的坑. Zookeeper部署中的坑 坑之一 E ...
- 用curl访问HTTPS站点并登录(对HTTP返回的结果特别清楚)
开发网站,少不了测试.现在的网站为了加强安全性,都启用了HTTPS协议.所谓HTTPS,也就是HTTP文本在SSL协议中传输.用curl命令行来测试HTTPS站点是个很有用的功能,写点脚本,就可以做功 ...