Graph Theory の brief introduction
一. 图的概念
1.定义
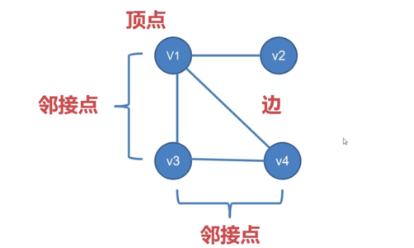
某类具体事物(顶点)和这些事物之间的联系(边),由顶点(vertex)和边(edge)组成, 顶点的集合V,边的集合E,图记为G = (V,E)
2.分类
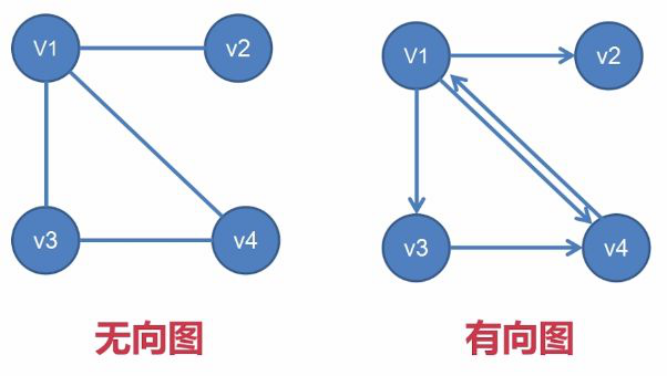
1、无向图 Def:边没有指定方向的图
2、有向图 Def:边具有指定方向的图 (有向图中的边又称为弧,起点称为弧头,终点称为 弧尾)
3.带权图 Def: 边上带有权值的图。(不同问题中,权值意义不同,可以是距离、时间、价格、代价等不同属性)

3.无向图的术语
两个顶点之间如果有边连接,那么就视为两个顶点相邻。
路径:相邻顶点的序列。
圈:起点和终点重合的路径。
连通图:任意两点之间都有路径连接的图。
度:顶点连接的边数叫做这个顶点的度。
树:没有圈的连通图。
森林:没有圈的非连通图。
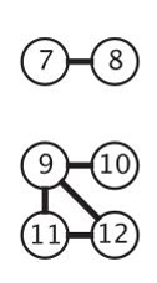
连通图 非连通图
4.有向图的术语
在有向图中,边是单向的:每条边所连接的两个顶点是一个有序对,他们的邻接性是单向的。
有向路径:相邻顶点的序列。
有向环:一条至少含有一条边且起点和终点相同的有向路径。
有向无环图(DAG):没有环的有向图。
度:一个顶点的入度与出度之和称为该顶点的度。
1)入度:以顶点为弧头的边的数目称为该顶点的入度
2)出度:以顶点为弧尾的边的数目称为该顶点的出度
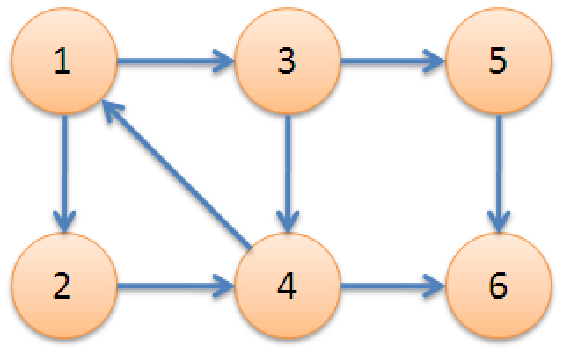
eg.
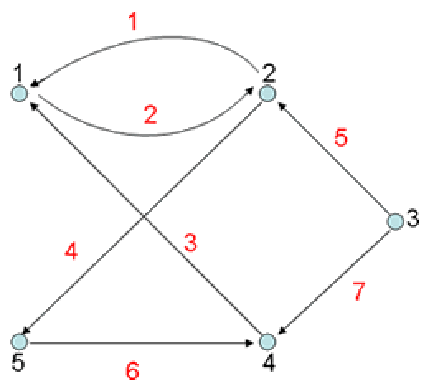
1->3->5->6 :有向路径 1->3->4->1 :有向环 (3、4、5、6) :无环有向图
节点1的度:3 节点1的入度:1 节点1的出度:2
二.图的表示
引入:如何用计算机来存储图的信息(顶点、边),这是图的存储结构要解决的问题?
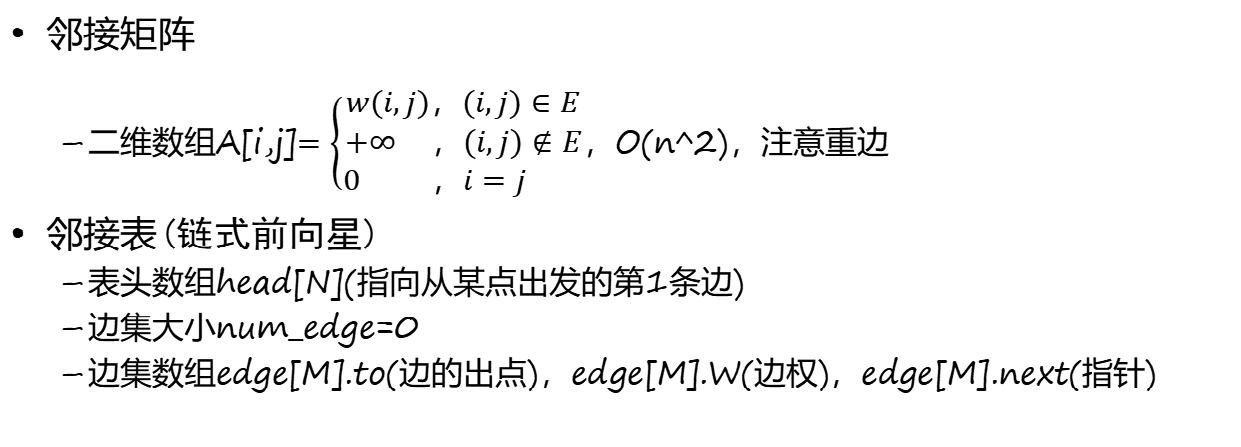
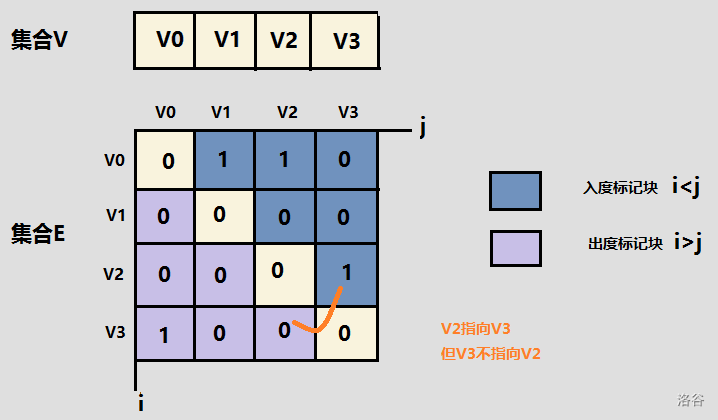
1、邻接矩阵
对于一个有V的顶点的图而言,可以使用V*V的二维数组表示。G[i][j] 表示的是顶点i与顶点j的关系。
如果顶点i和顶点j之间 有边相连, G[i][j]=1
如果顶点i和顶点j之间 无边相连, G[i][j]=0
对于无向图:G[i][j]=G[j][i]
在带权图中,如果在边不存在的情况下,将G[i][j]设置为0,则无法与权值为0的情况分开,因此选择较大的常数INF即可。
邻接矩阵的优点:可以在常数时间内判断两点之间是否有边存在。
邻接矩阵的缺点:表示稀疏图时,浪费大量内存空间。表示稠密图还是很划算。
eg. 邻接矩阵存储图
Code
#include<bits/stdc++.h>
using namespace std;
int a[1005][1005];
int main(){
int n,m;
scanf("%d%d",&n,&m);
int u,v;
for(int i=1;i<=m;i++){
scanf("%d%d",&u,&v);
a[u][v]=a[v][u]=1;
}
for(int i=1;i<=n;i++){
for(int j=1;j<=n;j++){
if(a[i][j])
printf("%d ",j);
}
printf("\n");
}
return 0;
}2、邻接表
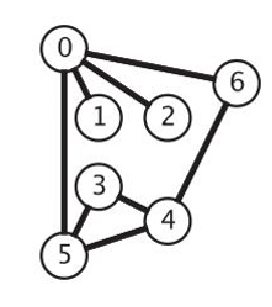
通过把“从顶点0出发有到顶点2,3,5的边”这样的信息保存在链表中来表示图。
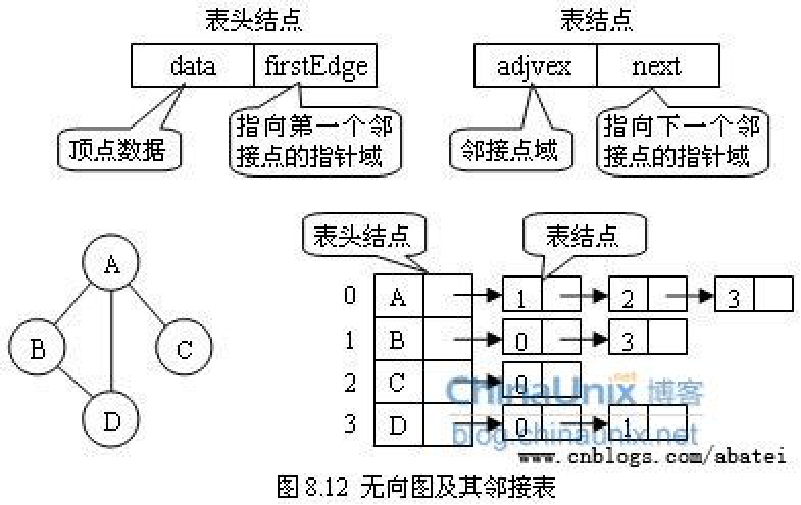
出边表的表结点存放的是从表头结点出发的有向边所指的尾顶点
入边表的表结点存放的则是指向表头结点的某个头顶点
带权图的邻接表 :在表结点中增加一个存放权的字段
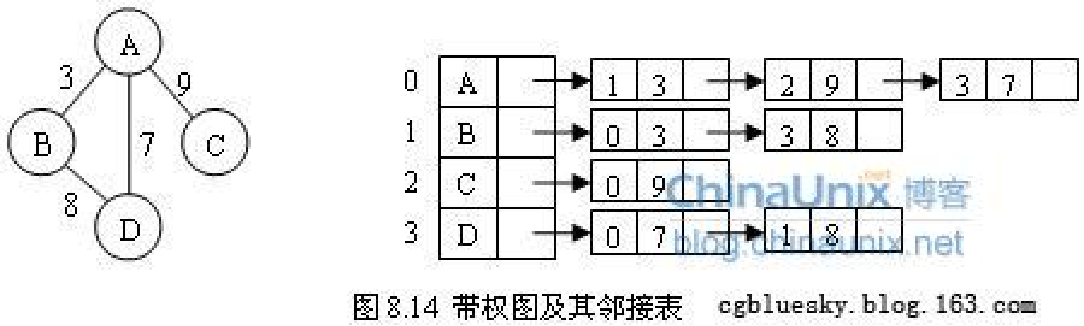
eg.
将如下的图利用邻接表进行表示,并输出每个顶点的度。
Code
#include<vector>
//存边(编号和边权)
struct edge{
int v,w;
edge(){}
//构造函数
edge(int V,int W){
v=V;
w=W;
}
};
vector<edge> G[maxn];
void addEdge(int u,int v,int w){
G[u].push_back(edge(v,w));
}
for(int i=1;i<=N;++i){
int u,v,w;
cin>>u>>v>>w;
addEdge(u,v,w);
addEdge(v,u,w);
}3.链式前向星
如果说邻接表是不好写但效率好,邻接矩阵是好写但效率低的话,前向星就是一个相对中庸的数据结构。前向星固然好写,但效率并不高。而在优化为链式前向星后,效率也得到了较大的提升。虽然说,世界上对链式前向星的使用并不是很广泛,但在不愿意写复杂的邻接表的情况下,链式前向星也是一个很优秀的数据结构。 ——摘自《百度百科》
链式前向星其实就是静态建立的邻接表,时间效率为O(m),空间效率也为O(m)。遍历效率也为O(m)。
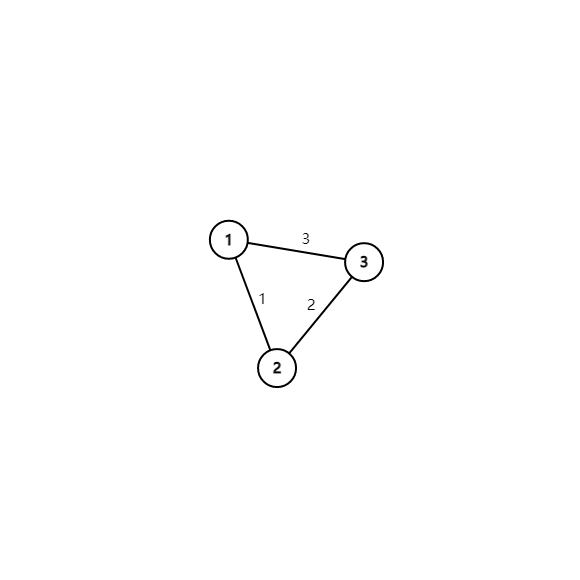
对于下面的数据,第一行5个顶点,7条边。接下来是边的起点,终点和权值。也就是边1 -> 2 权值为1。
样例
5 7
1 2 1
2 3 2
3 4 3
1 3 4
4 1 5
1 5 6链式前向星存的是以【1,n】为起点的边的集合,对于上面的数据输出就是:
1 //以1为起点的边的集合
1 5 6
1 3 4
1 2 1
2 //以2为起点的边的集合
2 3 2
3 //以3为起点的边的集合
3 4 3
4 //以4为起点的边的集合
4 5 7
4 1 5
5 //以5为起点的边不存在对比邻接表
对于邻接表来说是这样的:
1 -> 2 -> 3 -> 5
2 -> 3
3 -> 4
4 -> 1 -> 5
5 -> ^
对于链式前向星来说是这样的:
edge[0].to = 2; edge[0].next = -1; head[1] = 0;
edge[1].to = 3; edge[1].next = -1; head[2] = 1;
edge[2].to = 4; edge[2],next = -1; head[3] = 2;
edge[3].to = 3; edge[3].next = 0; head[1] = 3;
edge[4].to = 1; edge[4].next = -1; head[4] = 4;
edge[5].to = 5; edge[5].next = 3; head[1] = 5;
edge[6].to = 5; edge[6].next = 4; head[4] = 6;
简化后:1 -> 5 -> 3 -> 2由此可见对于每一个节点,输出的顺序为输入时的逆序
我们先对上面的7条边进行编号第一条边是0以此类推编号【0~6】,然后我们要知道两个变量的含义:
- Next :表示与这个边起点相同的上一条边的编号。
- head[ i ] :数组,表示以 i 为起点的最后一条边的编号。
加边函数是这样的:
void add_edge(int u, int v, int w)//加边,u起点,v终点,w边权
{
edge[cnt].to = v; //终点
edge[cnt].w = w; //权值
edge[cnt].next = head[u];//以u为起点上一条边的编号,也就是与这个边起点相同的上一条边的编号
head[u] = cnt++;//更新以u为起点上一条边的编号
}遍历函数是这样的:
for(int i = 1; i <= n; i++)//n个起点
{
cout << i << endl;
for(int j = head[i]; j != -1; j = edge[j].next)//遍历以i为起点的边
{
cout << i << " " << edge[j].to << " " << edge[j].w << endl;
}
cout << endl;
}第一层for循环是找每一个点,依次遍历以【1,n】为起点的边的集合。第二层for循环是遍历以 i 为起点的所有边,k首先等于head[ i ],注意head[ i ]中存的是以 i 为起点的最后一条边的编号。然后通过edge[ j ].next来找下一条边的编号。我们初始化head为-1,所以找到你最后一个边(也就是以 i 为起点的第一条边)时,你的edge[ j ].next为 -1做为终止条件。
Code
#include<bits/stdc++.h>
using namespace std;
const int maxn = 1005;//点数最大值
int n, m, cnt;//n个点,m条边
struct Edge
{
int to, w, next;//终点,边权,同起点的上一条边的编号
}edge[maxn];//边集
int head[maxn];//head[i],表示以i为起点的第一条边在边集数组的位置(编号)
void init()//初始化
{
for (int i = 0; i <= n; i++) head[i] = -1;
cnt = 0;
}
void add_edge(int u, int v, int w)//加边,u起点,v终点,w边权
{
edge[cnt].to = v; //终点
edge[cnt].w = w; //权值
edge[cnt].next = head[u];//以u为起点上一条边的编号,也就是与这个边起点相同的上一条边的编号
head[u] = cnt++;//更新以u为起点上一条边的编号
}
int main()
{
cin >> n >> m;
int u, v, w;
init();//初始化
for (int i = 1; i <= m; i++)//输入m条边
{
cin >> u >> v >> w;
add_edge(u, v, w);//加边
/*
加双向边
add_edge(u, v, w);
add_edge(v, u, w);
*/
}
for (int i = 1; i <= n; i++)//n个起点
{
cout << i << endl;
for (int j = head[i]; j != -1; j = edge[j].next)//遍历以i为起点的边
{
cout << i << " " << edge[j].to << " " << edge[j].w << endl;
}
cout << endl;
}
return 0;
}三.图的遍历
从图中的某个顶点出发,按某种方法对图中的所有顶点访问且仅访问一次。为了保证图中的顶点在遍历过程中仅访问一次,要为每一个顶点设置一个访问标志。
1.DFS
概念
深度优先搜索(Depth-First Search)遍历类似于树的先根遍历,是树的先根遍历的推广。假设初始状态是图中所有顶点未曾被访问,则深度优先搜索可从图中某 个顶点v出发,访问此顶点,然后依次从v的未被访问的邻接点出发深度优先遍历图,直至图中所有和v有路径相通的顶点都被访问到;若此时图中尚有顶点未被访 问,则另选图中一个未曾被访问的顶点作起始点,重复上述过程,直至图中所有顶点都被访问到为止。
Code
Code
#include<bits/stdc++.h>
#define Maxn 205
using namespace std;
int n, m;
bool a[Maxn][Maxn], vis[Maxn];
void DFS(int i) {
cout << i << ' ';
vis[i] = 1;
for (int j = 1; j <= n; j++) {
if (a[i][j]) {
if (!vis[j]) {
vis[j] = 1;
DFS(j);
}
}
}
}
int main() {
cin >> n >> m;
for (int i = 1; i <= m; i++) {
int x, y;
cin >> x >> y;
a[x][y] = 1;
}
for (int i = 1; i <= n; i++) {
if (!vis[i])
DFS(i);
}
return 0;
}2.BFS
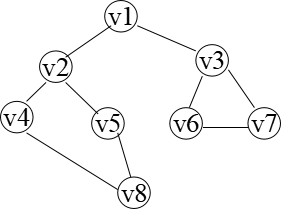
对(a)进行广度优先搜索 遍历的过程如图(b)所示, 得到的顶点访问序列为: v1->v2->v3->v4->v5->v6->v7->v8
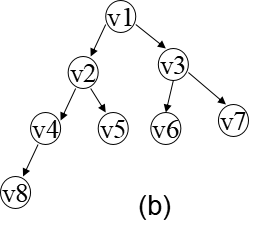
概念
广度优先搜索(Breadth-First Search)遍历类似于树的按层次遍历的过程。 假设从图中某顶点v出发,在访问v之后依次访问v的各个未被访问过的邻接点,然后分别从这些邻接点出发依次访问它们的邻接点,并使“先被访问的顶点的邻接 点”先于“后被访问的顶点的邻接点”被访问,直至图中所有已被访问的顶点的邻接点都被访问到。若此时图中尚有顶点未被访问,则另选图中一个未曾被访问的 顶点作起始点,重复上述过程,直至图中所有顶点都被访问到为止。换句话说,广度优先搜索遍历图的过程是以v为起始点,由近至远,依次访问和v有路径相通 且路径长度为1,2,…的顶点。
Code
#include<bits/stdc++.h>
using namespace std;
int n,m;
int a[205][205],vis[205];
void bfs(int x){
queue<int> Q;
Q.push(x);
printf("%d ",x);
vis[x]=1;
while(!Q.empty()){
int now=Q.front();
Q.pop();
for(int i=1;i<=n;i++){
if(a[now][i]&&!vis[i]){
Q.push(i);
printf("%d ",i);
vis[i]=1;
}
}
}
}
int main() {
scanf("%d%d",&n,&m);
int u,v;
for(int i=1;i<=m;i++){
scanf("%d%d",&u,&v);
a[u][v]=a[v][u]=1;
}
int k;
scanf("%d",&k);
bfs(k);
return 0;
}3.欧拉路径和欧拉回路
欧拉路是指存在这样一种图 , 可以从其中一点出发 , 不重复地走完其所有的边 . 如果欧拉路的起点与终点相同 则称之为欧拉回路
欧拉路存在的充要条件 : 图是连通的 ,因为若不连通不可能一次性遍历所有边。
对于无向图有且仅有两个点 ,与其相连的边数为奇数 ,其他点相连边数皆为偶数 ;对于两个奇数点 , 一个为起点 , 一个为终点 . 起点需要出去 ,终点需要进入 ,故其必然与奇数个边相连 .
对于有向图 除去起点和终点 , 所有点的出度与入度相等 。且起点出度比入度大 1。终点入度比出度大 1。 若起点终点出入度也相同 ,则称为欧拉回路。
可参见鸽巢原理
eg.一笔画问题
Code
#include <bits/stdc++.h>
using namespace std;
int g[1005][1005], ans[1005], num[1005], idx = 0, n, m, st = 1;
;
void dfs(int i) {
for (int j = 1; j <= n; j++) {
if (g[i][j]) {
g[i][j] = g[j][i] = 0;
dfs(j);
}
}
ans[++idx] = i;
}
int main() {
memset(g, 0, sizeof(g));
scanf("%d%d", &n, &m);
for (int i = 1; i <= m; i++) {
int x, y;
scanf("%d%d", &x, &y);
g[x][y] = g[y][x] = 1;
num[x]++;
num[y]++;
}
for (int i = 1; i <= n; i++) {
if (num[i] % 2)
st = i;
}
dfs(st);
for (int i = 1; i <= idx; i++) {
printf("%d ", ans[i]);
}
return 0;
}4.哈密顿路
哈密顿路径也称作哈密顿链,指在一个图中沿边访问每个顶点恰好一次的路径。
Code
#include<bits/stdc++.h>
using namespace std;
int n,a[105][105],ans=0;
bool mp[105];
void dfs(int k,int t)
{
if(t==n){
ans++;
return;
}
for(int i=1;i<=n;i++)
{
if(a[k][i]==1 &&mp[i]==true)
{
mp[i]=false;
dfs(i,t+1);
mp[i]=true;
}
}
}
int main()
{
cin>>n;
for(int i=1;i<=n;i++)
for(int j=1;j<=n;j++)
scanf("%d",&a[i][j]);
for(int i=1;i<=n;i++){
memset(mp,true,sizeof(mp));
mp[i]=false;
dfs(i,1);
}
printf("%d",ans);
return 0;
}四.最短路问题
最短路径问题是图论研究中的一个经典算法问题, 旨在寻找图(由结点和路径组成的)中两结点之间的最短路径。
1.Floyd
佛洛伊德是最简单的最短路径算法,可以计算图中任意两点间的最短路径。时间复杂度为O(N3),适用于出现负边权的情况。
算法描述:
(a)初始化:点u、v如果有边相连,则F[u][v]=w[u][v]
如果不相连,则
for(int k=1;k<=n;k++) {
for(int i=1;i<=n;i++) {
for(int j=1;j<=n;j++) {
F[i][j]=max(F[i][j],F[i][k]+F[k][j]);
}
}
}(c)算法结束:F[i][j]得出的就是任意起点i到任意终点j的最短路径。
疑问:为什么枚举中间点的循环k要放在最外层?
Answer
可以从一定不经过k点与一定经过k点的三维数组比较中推导出来
动态规划以”途径点集大小”为阶段?
决策需要枚举中转点,不妨考虑也以中转点集为阶段
F[k,i,j]表示”可以经过标号≤k的点中转时”从i到j的最短路
F[0,i,j]=W[i,j],W为前面定义的邻接矩阵
F[k,i,j]=min{F[k-1,i,j] , F[k-1,i,k]+F[k-1,k,j]},O(N^3)
k这一维空间可以省略,变成F[i,j]
就成为了我们平时常见的Floyd算法
由于k是DP的阶段循环,所以k循环必须要放在最外层动态规划以”途径点集大小”为阶段?
决策需要枚举中转点,不妨考虑也以中转点集为阶段 F[k,i,j]表示”可以经过标号≤k的点中转时”从i到j的最短路 F[0,i,j]=W[i,j],W为前面定义的邻接矩阵 F[k,i,j]=min{F[k-1,i,j] , F[k-1,i,k]+F[k-1,k,j]},O(N3)
k这一维空间可以省略,变成F[i,j] 就成为了我们平时常见的Floyd算法 由于k是DP的阶段循环,所以k循环必须要放在最外层 。
也就是说每进行一次K的循环,计算的都是任意两点之间只经过前K个中转点(可以不选)的最短路。
使用floyd输出最短路径
Floyd算法输出路径也是采用记录前驱点的方式。因为floyd是计算任意两点间最短路径的算法,F[i][j]记录从i到j的最短路径值。故我们定义pre[i][j]为一个二维数组,记录从i到j的最短路径中,j的前驱点是哪一个。递归还原路径。
初始化pre[i][i]为0,输入相连边时,重置相连边尾结点的前驱
若有无向边:pre[a][b]=a; pre[b][a]=b; 更新若floyd最短路有更新,那么pre[i][j]=pre[k][j];
Q:(这能不能直接赋值k的值?)
Answer
不能,因为不一定选了第K个点。递归输出指两点s,e的最短路,先输出起点s,再将终点e放入递归,输出s+1~e的所有点。
Code
void print(int x) {
if(pre[s][x]==0) return;
print(pre[s][x]);
printf(“->%d”,x);
}2.Dijkstra
预备知识:松弛操作
原来用一根橡皮筋连接a,b两点,现在有一点k,使得a->k->b比a->b的距离更短,则把橡皮筋改为a->k->b,这样橡皮筋更加松弛。这样说或许不好理解,毕竟两点之间线段最短是常识。可以这样想,如果今天我要去罗马,有很多种选择。当然选择最短的路。但如果最短的那条路太堵了,还不如选远一点但不堵的呢,就可以试着转站。这就是带权的最短路问题。
if(dis[b]<dis[k]+w[k][b])
dis[b]=dis[k]+w[k][b]结点分成两组:已经确定最短路、尚未确定最短路 不断从第2组中选择路径长度最短的点放入第1组并扩展 本质是贪心,只能应用于正权图 普通的Dijkstra算法O(N^2) 堆优化的Dijkstra算法O(NlogN)~O(MlogN)
算法描述:
设起点为s,dis[v]表示从指定起点s到v的最短路径,pre[v]为v的前驱,用来输出路径
(a)初始化
memset(dis,+∞),memset(vis,false);
(v:1~n)dis[v]=w[s][v];
dis[s]=0;pre[s]=0;
vis[s]=true;
(b)for(i=1;i<=n-1;i++)
①在没有被访问过的点中找一个相邻顶点k,使得dis[k]是最小的;
②k标记为已确定的最短路vis[k]=true;
③用for循环更新与k相连的每个未确定最短路径的顶点v (所有未确定最短路的点都松弛更新)
if(dis[k]+w[k][v]<dis[v]) dis[v]=dis[k]+w[k][v],pre[v]=k;
(c)算法结束dis[v]为s到v的最短路距离;pre[v]为v的前驱结点,用来输出路径。

Code
#include <bits/stdc++.h>
using namespace std;
int n,m,s,t;
const int N =100001;
int dis[N];//从起始点到i的最短路
int vis[N];//是否确定最短路
struct edge {
int v,w;
};
struct node {
int u,dis;//下标,距离
bool operator<(const node &tmp)
const {
return dis>tmp.dis;//让还没有确定最短路的数以距离 从小到大,每一次选最小的作为松弛点
}
};
priority_queue<node> Q;
vector<edge> G[N];
int Dijkstra(int S,int T) {
memset(vis,0,sizeof(vis));
memset(dis,0x3f,sizeof(dis));
dis[S]=0;
Q.push((node){S,0});//将起点压入队列
while(!Q.empty()) {
int u=Q.top().u;//取出起点下标
Q.pop();
if(vis[u]) continue;//如果已经确定最短路径,continue
vis[u]=1;
int v,w,siz=G[u].size();
for(int i=0;i<siz;i++) {//枚举与u相邻的点
v=G[u][i].v,w=G[u][i].w;//取出与它相邻点下的标,与它的距离
if(dis[v]>dis[u]+w) {//将起点到此相邻点的距离 与将u作为起点到v的松弛点比较(进行松弛操作)
dis[v]=dis[u]+w;
Q.push((node){v,dis[v]}); //如果进行松弛操作,压入队列
}
}
}
return dis[T];
}
int main()
{
int u,v,w;
scanf("%d %d %d %d",&n,&m,&s,&t);
for(int i=0;i<m;i++) {
scanf("%d %d %d",&u,&v,&w);
G[u].push_back((edge){v,w});
G[v].push_back((edge){u,w});
}
cout<<Dijkstra(s,t);
return 0;
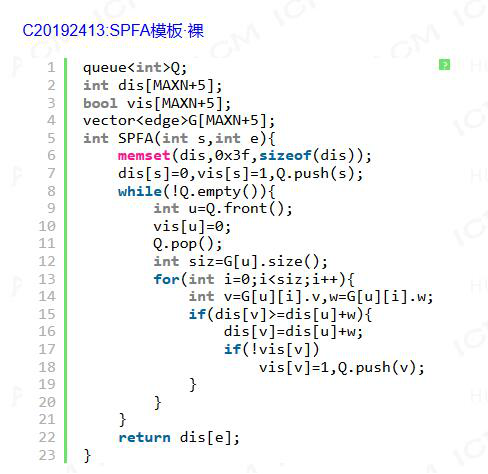
}3.Bellman-Ford算法 与SPFA算法
Bellman-Ford算法:对每条边执行更新,迭代N-1次。 具体操作是对图进行最多n-1次松弛操作,每次操作对所有的边进行松弛,为什么是n-1次操作呢?这是因为我们输入的边不一定是按源点由近至远,万一是由远至近最坏情况就得n-1次,我们可以以一个单链A→B→C→D来举例(由老师写黑板吧) 可以应用于负权图
SPFA:对每条边执行更新,迭代N-1次 SPFA = 队列优化的Bellman-Ford算法 本质上还是迭代——每更新一次就考虑入队 稀疏图上O(kN),稠密图上退化到O(N^2)
SLF优化:Small Label First, 新入队点与队头比较
LLL优化:Large Label Last, 队头与平均值比较 可以应用于有向负权图
算法实现:
在Bellmanford算法中,有许多松弛是无效的。这给了我们很大的改进的空间。SPFA算法正是对Bellmanford算法的改进。它是由西南交通大学段丁凡1994提出的。它采用了队列和松弛技术。先将源点加入队列。然后从队列中取出一个点(此时该点为源点),对该点的邻接点进行松弛,如果该邻接点松弛成功且不在队列中,则把该点加入队列。如此循环往复,直到队列为空,则求出了最短路径。 判断有无负环:如果某个点进入队列的次数超过N次则存在负环 ( 存在负环则无最短路径,如果有负环则会无限松弛,而一个带n个点的图至多松弛n-1次)
五.最小生成树
树有这样一个定理:N个点用N-1条边连接成一个连通块,形成的图形只可能是树,叫做生成树!因此,一个有N个点的连通图,边一定是≥N-1条的!特别的 口袋的天空 ,如果想要连出k棵树,就需要连n-k条边。
1.Kruskal算法
利用并查集维护。初始时每个点单独为一个集合,把边的权值从小到大排序后依次扫描。如果这条边的u,v在一个集合,那么如果把u,v连上就会形成一个回路,因此不管(见下图)。如果不在一个集合,就合并。
很显然,按照我们的思路,权值为3的这条边是不应该被连的。又因为前面排过序,保证了最小值的准确性
具体流程
(a)初始化
①写出找祖先函数int find_father(int x)
②写出合并函数void union_set(int x , int y)
③写出sort的cmp(结构体a.u , a.v , a.w),对存在的边权(a.w)从小到大排序
④主函数里面:for输入边,for把每个点的父节点初始化为自己,sort排序
⑤MST=0
(b)for(i=1;i<=m;i++)
①if两个点的祖先不是同一个,连接两个点,MST+=边权,边+1;
②if(边==n-1)break;
(c)算法结束:MST即为最小生成树的权值之和。
Code
#include<bits/stdc++.h>
using namespace std;
struct edge {
int u,v,c;
}G[10005];
int fa[10005];
int Find(int x) {
if(fa[x]==x) return x;
return fa[x]=Find(fa[x]);
}
bool cmp(edge x,edge y) {
return x.c<y.c;
}
int main() {
int n,m;
scanf("%d %d",&n,&m);
for(int i=1;i<=n;i++)
fa[i]=i;
for(int i=1;i<=m;i++) {
scanf("%d %d %d",&G[i].u,&G[i].v,&G[i].c);
}
sort(G+1,G+m+1,cmp);
int cnt=0,sum=0;
for(int i=1;i<=m;i++) {
int x=Find(G[i].u),y=Find(G[i].v);
if(x==y) continue;
fa[x]=y;
sum=max(G[i].c,sum);
cnt++;
if(cnt==n) break;
}
printf("%d %d",n-1,sum);
return 0;
}2.Prim算法
笔者还是更喜欢Kruskal
以任意一个点为基准点 节点分为两组:
1. 在MST上到基准点的路径已经确定的点
2. 尚未在MST中与基准点相连的点
不断从第2组中选择与第1组距离最近的点加入第1组 类似于Dijkstra,本质也是贪心,O(N^2)
具体流程
也使用“蓝白点”思想,白点代表已进入最小生成树的点,蓝点代表未进入最小生成树的点。以1为起点生成最小生成树,min[v]表示蓝点v与白点相连的最小边权,MST表示最小生成树的权值之和。
(a)初始化:min[v]=∞(v≠1); min[1]=0; MST=0;
(b)for(i=1;i<=n;i++)
①for寻找min[u],最小的蓝点u;
②将u标记为白点;
③MST+=min[u];
④for与白点u相连的所有蓝点v(可暴力枚举,更好的是求vector的size)
if(w[u][v]<min[v]) min[v]=w[u][v];
(c)算法结束:MST即为最小生成树的权值之和。
Code
#include<bits/stdc++.h>
using namespace std;
int n,ans, a[105][105],m[105],p[105];
int main()
{
scanf("%d",&n);
for (int i=1;i<=n;i++)
for (int j=1;j<=n;j++)
scanf("%d",&a[i][j]);
memset(m,0x3f,sizeof(m));
memset(p,0,sizeof(p));
m[1]=0;
for (int i=1;i<=n;i++)
{
int k=0;
for (int j=1;j<=n;j++)
if (p[j]==0&&m[j]<m[k])
k=j;
p[k]=1;
ans+=m[k];
for (int j=1;j<=n;j++)
if (p[j]!=1&&a[k][j]<m[j])
m[j]=a[k][j];
}
cout<<ans<<endl;
return 0;
}堆优化和邻接表就不写了吧……(心虚……)
Show time
No.1 走廊泼水节
给定一棵N个节点的树,要求增加若干条边,把这棵树扩充为完全图,并满足图的唯一最小生成树仍然是这棵树。
求增加的边的权值总和最小是多少。
题目分析
首先说明,笔者是看懂的 LINK 这篇博客。
看到题面,我们首先需要知道完全图是什么。度娘如是说道:“完全图是一个简单的无向图,其中每对不同的顶点之间都恰连有一条边相连”。相当于题目给了你一颗子树,让你填充。倒着想,如果给了你一颗完全图求最小生成树,你会怎么求?先从小到大排序。然后你会发现对于最小生成树的每两个,如果在完全图中还存在另一边(最小生成树中不包含),那么这一边一定比对于这两点在最小生成树的任意边小。倒回来,你填充的任意边必须比这两点连通的边大。
首先我们设Sx表示为x之前所在的连通块 那么Sy表示为y之前所在的连通块.
假如说点A属于Sx这个集合之中 点B属于Sy这个集合之中. 那么点A与点B之间的距离,必须要大于之前的w,否则就会破坏之前的最小生成树,所以说(A,B)之间的距离最小为w+1。假如说我们知道Sx有p个元素,然后Sy有q个元素。那么将Sx与Sy连通块的所有点相连.显然这个两个连通块会增加.p×q−1条边。然后每一条边的最小长度都为w+1。
所以我们会得出(w+1)×(p∗q−1)为两个连通块成为完全图的最小代价
Code
#include <bits/stdc++.h>
using namespace std;
int s[6005],fa[6005];
struct Edge {
int u,v,w;
}edge[6005];
bool cmp (Edge x,Edge y) {
return x.w<y.w;
}
int Find(int x) {
if(fa[x]==x) return x;
return fa[x]=Find(fa[x]);
}
int main() {
int t;
scanf("%d",&t);
while(t--) {
int n;
scanf("%d",&n);
for(int i=1;i<=n;i++)
fa[i]=i,s[i]=1;
for(int i=1;i<n;i++) {
scanf("%d %d %d",&edge[i].u,&edge[i].v,&edge[i].w);
}
sort(edge+1,edge+n,cmp);
int ans=0;
for(int i=1;i<n;i++) {
int x=Find(edge[i].u),y=Find(edge[i].v);
if(x==y) continue;
fa[x]=y;
ans+= (edge[i].w+1) * (s[x]*s[y]-1);
s[y]+=s[x];
}
printf("%d\n",ans);
}
return 0;
}No.2 最短路上的统计
既然是多源最短路,就应该用Floyd来做。
我们先用三重循环跑一遍Floyd,先求得最短路。
对于每一个ask,依次枚举每一个点看最短路经不经过。
Code
#include<bits/stdc++.h>
using namespace std;
int n,m,a[101][101],ans[101][101],p,x,y;
int main()
{
memset(a,127/3,sizeof(a));
scanf("%d%d",&n,&m);
for(int i=1;i<=m;++i){
scanf("%d%d",&x,&y);
a[x][y]=1;a[y][x]=1; //权值为1
}
for(int i=1;i<=n;++i) //初始化一下
a[i][i]=0;
for(int k=1;k<=n;k++) //Floyed
for(int i=1;i<=n;++i)
for(int j=1;j<=n;++j)
a[i][j]=min(a[i][j],a[i][k]+a[k][j]);
scanf("%d",&p);
for(int i=1;i<=p;++i){
scanf("%d%d",&x,&y);
if(ans[x][y]==0){
for(int k=1;k<=n;++k) //枚举点k
if(a[x][k]+a[k][y]==a[x][y]) ans[x][y]++; //如果点k在最短路上,ans++
ans[y][x]=ans[x][y];
}
printf("%d\n",ans[x][y]); //输出
}
}No.3 Kuglarz
我们可以发现,我们要确定 i 里面有没有东西,有两种方法:
1.直接看 ( i , i )
2.看 ( i , j ) 和 ( i + 1 , j )
我们可以把点变成边权, i 变成 i − 1 到 i的一条边。( 对于(i,i)这种自环情况可以设置一个虚点0 )
那我们就发现我们要让最小的边权使得所有的点都被连起来。
如果我们知道每一个位置是否有小球,那么就可以知道区间[ 0 , i ] (1≤i≤n)的奇偶性。
相反,如果我们知道区间 [ 0 , i ] (1≤i≤n)的奇偶性,那么我们就可以知道每个位置是否有小球。所以我们只用花费最小代价求知每个[0,i]区间的奇偶性。
如果我们知道区间[0,i-1]和[i,j]的奇偶性,就可以知道[0,j]的奇偶性。同理,如果知道[0,j]和[i,j]的奇偶性,我们就可以知道[0,i-1]的奇偶性。
位置0是我们虚构的节点,该位置上一定没有小球,所以[0,0]为偶。
对于一次询问[i,j],我们将[0,i-1]和[0,j]之间连一条权值为ci,j的边,表示知道其中一个,花费ci,j代价可以知道另一个。
只要保证所有点和[0,0]联通,即整个图联通,即可保证知道所有[0,i]的奇偶性,就可以知道所有位置上是否有小球。
图已经建好了,直接求最小生成树即可。边数较多,建议使用Prim,但笔者很菜只会kruscal。
Code
#include <bits/stdc++.h>
using namespace std;
typedef long long ll;
struct Edge {
ll u,v,w;
}edge[5000005];
ll fa[5000005];
bool cmp(Edge x,Edge y) {
return x.w<y.w;
}
ll Find(ll x) {
if(x==fa[x]) return x;
return fa[x]=Find(fa[x]);
}
int main() {
//freopen("kuglurz.in","r",stdin);
//freopen("kuglurz.out","w",stdout);
ll n,a,idx=0;
scanf("%lld",&n);
for(ll i=1;i<=n;i++)
fa[i]=i;
for(ll i=1;i<=n;i++) {
for(ll j=i;j<=n;j++) {
scanf("%lld",&a);
edge[++idx].u=i-1,edge[idx].v=j,edge[idx].w=a;
}
}
sort(edge+1,edge+idx+1,cmp);
ll sum=0,cnt=0;
for(ll i=1;i<=idx;i++) {
ll x=Find(edge[i].u),y=Find(edge[i].v);
if(x==y) continue;
cnt++;
fa[x]=y;
sum+=edge[i].w;
if(cnt==n) break;
}
printf("%lld",sum);
return 0;
}No.4 棋盘上的守卫
在( i,j )这个点上我们可以放置两种守卫,第一种是横向守卫,第二种是竖向守卫,所以它们之间只能选择一种,可以抽象成一条边,链接的是横向的第 i 个阶段,竖向的第 j 个阶段,为了方便,我们将 j的下标写作j + n。
可以得到一条性质: 对于任意一个点 i, 若 i > n,则这是列的阶段。
将行列看成
n+m个点。将每个格点放置守卫看成所在行列连了一条边,然后把每条边定向,如果被指向表示当前格点对当前 行/列 进行了保护。这样就会有
n+m个点,n+m条有向边,同时每条边最多有 1 的入度。形成了基环树森林。
如果当前两个点在同一集合,那么判断是否已经成环,如果不成环还可以加上这一条边。
如果当前两个点不在同一个集合,那么判断是否存在一个点所在集合没有成环,如果是,可以加边。
Code
//基环树
#include <bits/stdc++.h>
using namespace std;
typedef long long ll;
struct Edge {
ll u, v, w;
} edge[100005];
ll fa[100005];
bool vis[100005];
ll Find(ll x) {
if (x == fa[x])
return x;
return fa[x] = Find(fa[x]);
}
bool cmp(Edge x, Edge y) { return x.w < y.w; }
int main() {
ll n, m, a, idx = 0;
scanf("%lld %lld", &n, &m);
for (ll i = 1; i <= n; i++) {
for (ll j = 1; j <= m; j++) {
scanf("%lld", &a);
edge[++idx].u = i, edge[idx].v = j + n, edge[idx].w = a;
}
}
for (ll i = 1; i <= m + n; i++) {
fa[i] = i;
}
sort(edge + 1, edge + idx + 1, cmp);
ll ans = 0;
for (ll i = 1; i <= idx; i++) {
ll x = Find(edge[i].u), y = Find(edge[i].v);
if (vis[x] && vis[y]) { //如果已经成环
continue;
} else if (x == y) { //如果在一个集合,连一条边可以成环
vis[y]=vis[x] = 1;//记录这两边已经成一个环
ans += edge[i].w;
} else {
fa[x] = y;
ans += edge[i].w;
vis[y] = vis[y] | vis[x];//如果原x或y与别的树成环 ,记录y是已成环树
}
}
printf("%lld", ans);
return 0;
}Graph Theory の brief introduction的更多相关文章
- Introduction to graph theory 图论/脑网络基础
Source: Connected Brain Figure above: Bullmore E, Sporns O. Complex brain networks: graph theoretica ...
- 图论介绍(Graph Theory)
1 图论概述 1.1 发展历史 第一阶段: 1736:欧拉发表首篇关于图论的文章,研究了哥尼斯堡七桥问题,被称为图论之父 1750:提出了拓扑学的第一个定理,多面体欧拉公式:V-E+F=2 第二阶段( ...
- The Beginning of the Graph Theory
The Beginning of the Graph Theory 是的,这不是一道题.最近数论刷的实在是太多了,我要开始我的图论与树的假期生活了. 祝愿我吧??!ShuraK...... poj18 ...
- Codeforces 1109D Sasha and Interesting Fact from Graph Theory (看题解) 组合数学
Sasha and Interesting Fact from Graph Theory n 个 点形成 m 个有标号森林的方案数为 F(n, m) = m * n ^ {n - 1 - m} 然后就 ...
- CF1109D Sasha and Interesting Fact from Graph Theory
CF1109D Sasha and Interesting Fact from Graph Theory 这个 \(D\) 题比赛切掉的人基本上是 \(C\) 题的 \(5,6\) 倍...果然数学计 ...
- HDU6029 Graph Theory 2017-05-07 19:04 40人阅读 评论(0) 收藏
Graph Theory Time Limit: 2000/1000 M ...
- Codeforces 1109D. Sasha and Interesting Fact from Graph Theory
Codeforces 1109D. Sasha and Interesting Fact from Graph Theory 解题思路: 这题我根本不会做,是周指导带飞我. 首先对于当前已经有 \(m ...
- 2018 Multi-University Training Contest 4 Problem L. Graph Theory Homework 【YY】
传送门:http://acm.hdu.edu.cn/showproblem.php?pid=6343 Problem L. Graph Theory Homework Time Limit: 2000 ...
- Graph Theory
Description Little Q loves playing with different kinds of graphs very much. One day he thought abou ...
随机推荐
- 一篇文章说清 webpack、vite、vue-cli、create-vue 的区别
webpack.vite.vue-cli.create-vue 这些都是什么?看着有点晕,不要怕,我们一起来分辨一下. 先看这个表格: 脚手架 vue-cli create-vue 构建项目 vite ...
- jenkins插件Role-based添加账号后显示红色"No type prefix"
jenkins插件Role-based添加账号save后,前面显示红色"No type prefix",不影响使用. 查了下原因,网上很少正解,我这里记录下正确的方法: 添加用户: ...
- Java高并发-概念
一.为什么需要并行 业务要求 http处理多个客户端请求 java虚拟机启动多个线程 进程开销比线程大的多 性能 多线程在多核系统比单线程要好的多 摩尔定律失效 二.几个重要概念 2.1 同步和异步 ...
- Linux内网渗透
Linux虽然没有域环境,但是当我们拿到一台Linux 系统权限,难道只进行一下提权,捕获一下敏感信息就结束了吗?显然不只是这样的.本片文章将从拿到一个Linux shell开始,介绍Linux内网渗 ...
- python之部分内置函数与迭代器与异常处理
目录 常见内置函数(部分) 可迭代对象 迭代器对象 for循环内部原理 异常处理 异常信息的组成部分 异常的分类 异常处理实操 异常处理的其他操作 for循环本质 迭代取值与索引取值的区别 常见内置函 ...
- elementUI 函数自定义传参
<div v-for="(item,i) in ruleContent" :key="i"> <!-- eg:想通过循环将[i]传进函数rul ...
- Spring Ioc源码分析系列--自动注入循环依赖的处理
Spring Ioc源码分析系列--自动注入循环依赖的处理 前言 前面的文章Spring Ioc源码分析系列--Bean实例化过程(二)在讲解到Spring创建bean出现循环依赖的时候并没有深入去分 ...
- Javaer 面试必背系列!超高频八股之三色标记法
可达性分析可以分成两个阶段 根节点枚举 从根节点开始遍历对象图 前文提到过,在可达性分析中,第一阶段 "根节点枚举" 是必须 STW 的,不然如果分析过程中用户进程还在运行,就可能 ...
- Java实用类(五) -Math类和指定范围的随机数
1.Math类 java.lang.Math类提供了常用的数学运算方法和两个静态常量E(自然对数的底数) 和PI(圆周率) // 绝对值 System.out.println(Math.abs(-3. ...
- Linux安装MySQL,数据库工具连接Linux的MySQL
1.centOS中默认安装了MariaDB,需要先进行卸载 rpm -qa | grep -i mariadb rpm -e --nodeps 上面查出来的mariadb 2.下载MySQL仓库并安装 ...