VINS中旋转外参初始化
VINS 中的旋转外参初始化
为了使这个两个传感器融合,我们首先需要做的事情是将两个传感器的数据对齐,除了时间上的对齐,还有空间上的对齐。空间上的对齐通俗的讲就是将一个传感器获取的数据统一到另一个传感器的坐标系中,其关键在于确定这两个传感器之前的外参,本文将详细介绍 VINS_Mono 中 camera-imu 的旋转外参标定算法原理并对其代码进行解读(VINS-Fusion中也是一样的)。
相机与 IMU 之间的相对旋转如下图所示:
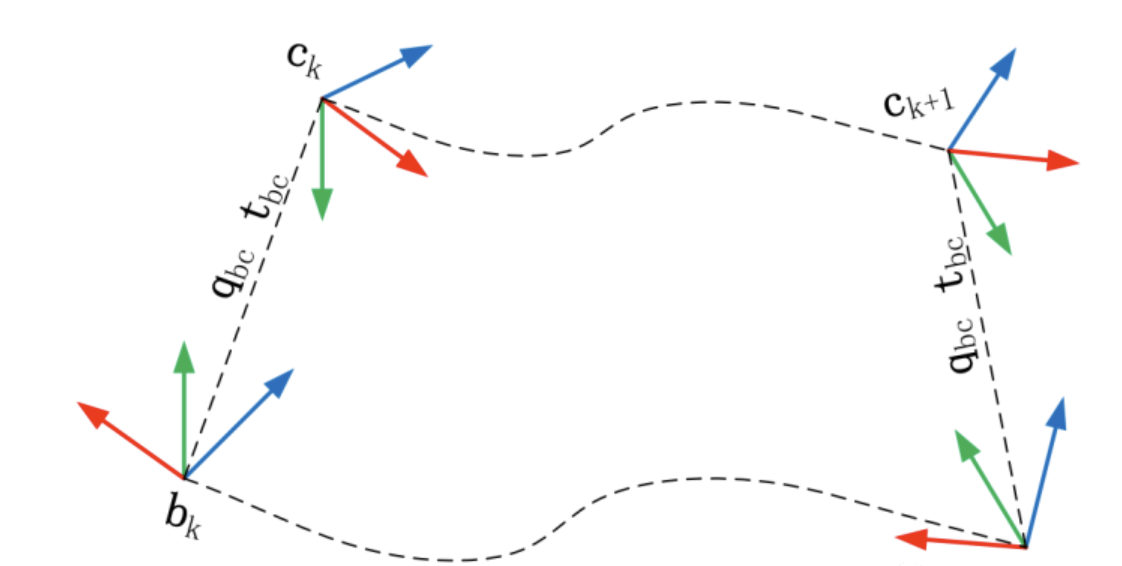
上图表示相机和 IMU 集成的系统从到的运动,其中视觉可以通过特征匹配求得到时刻的旋转增量,同时 IMU 也可以通过积分得到到时刻的旋转增量。两个求得的旋转增量应当是相同的,因此分别将在自己坐标系下求得的增量转移到对方的坐标系下,即经过 \(\mathbf{q}_{bc}\) 变换后应当还是相同的。
相邻两时刻 \(k\) , \(k + 1\) 之间有: IMU 旋转积分 \(\mathbf{q}_{b_{k} b_{k+1}}\) ,视觉测量 \(\mathbf{q}_{c_{k} c_{k+1}}\)。则有:
\]
上面的式子可以写成:
\]
其中 \(\left[ \dot{\ \ \ } \right]_L, \left[ \dot{\ \ \ } \right]_R\) 表示 left and right quaternion multiplication,不清楚可以看附录,其实就是四元数乘法换了个表达形式。
将多个时刻线性方程累计起来,并加上鲁棒核权重得到:
{\left[\begin{array}{c}
w_{1}^{0} \cdot \mathbf{Q}_{1}^{0} \\
w_{2}^{1} \cdot \mathbf{Q}_{2}^{1} \\
\vdots \\
w_{N}^{N-1} \cdot \mathbf{Q}_{N}^{N-1}
\end{array}\right] \mathbf{q}_{b c}=\mathbf{Q}_{N} \cdot \mathbf{q}_{b c}=\mathbf{0}} \\
w_{k+1}^{k}=\left\{\begin{array}{ll}
1, & r_{k+1}^{k}<\text { threshold } \\
\frac{\text { threshold }}{r_{k+1}^{k}}, & \text { otherwise }
\end{array}\right.
\end{array}
\]
该线性方程为超定方程,有最小二乘解。采用 SVD 进行求解。
- 代码
bool InitialEXRotation::CalibrationExRotation(vector<pair<Vector3d, Vector3d>> corres, Quaterniond delta_q_imu, Matrix3d &calib_ric_result)
{
frame_count++;
Rc.push_back(solveRelativeR(corres)); // 对极几何计算出的 R,t 约束
Rimu.push_back(delta_q_imu.toRotationMatrix()); // IMU 预积分的得到的 R,t 约束
Rc_g.push_back(ric.inverse() * delta_q_imu * ric); // 将imu预积分转换到相机坐标系
Eigen::MatrixXd A(frame_count * 4, 4);
A.setZero();
int sum_ok = 0;
for (int i = 1; i <= frame_count; i++)
{
Quaterniond r1(Rc[i]);
Quaterniond r2(Rc_g[i]);
// A.angularDistance(B):是求两个旋转之间的角度差,用弧度表示
double angular_distance = 180 / M_PI * r1.angularDistance(r2);
ROS_DEBUG(
"%d %f", i, angular_distance);
double huber = angular_distance > 5.0 ? 5.0 / angular_distance : 1.0; // huber 核函数作加权
++sum_ok;
// L R 分别为左乘和右乘矩阵
Matrix4d L, R;
double w = Quaterniond(Rc[i]).w();
Vector3d q = Quaterniond(Rc[i]).vec();
L.block<3, 3>(0, 0) = w * Matrix3d::Identity() + Utility::skewSymmetric(q);
L.block<3, 1>(0, 3) = q;
L.block<1, 3>(3, 0) = -q.transpose();
L(3, 3) = w;
Quaterniond R_ij(Rimu[i]);
w = R_ij.w();
q = R_ij.vec();
R.block<3, 3>(0, 0) = w * Matrix3d::Identity() - Utility::skewSymmetric(q);
R.block<3, 1>(0, 3) = q;
R.block<1, 3>(3, 0) = -q.transpose();
R(3, 3) = w;
A.block<4, 4>((i - 1) * 4, 0) = huber * (L - R);
}
// svd 分解中最小奇异值对应的右奇异向量作为旋转四元数
JacobiSVD<MatrixXd> svd(A, ComputeFullU | ComputeFullV);
Matrix<double, 4, 1> x = svd.matrixV().col(3);
Quaterniond estimated_R(x);
// 所求的 x 是q^b_c,在最后需要转换成旋转矩阵并求逆。
ric = estimated_R.toRotationMatrix().inverse();
//cout << svd.singularValues().transpose() << endl;
//cout << ric << endl;
Vector3d ric_cov;
ric_cov = svd.singularValues().tail<3>();
// 至少迭代计算了WINDOW_SIZE次,且R的奇异值大于0.25才认为标定成功
if (frame_count >= WINDOW_SIZE && ric_cov(1) > 0.25)
{
calib_ric_result = ric;
return true;
}
else
return false;
}
Appendix
- The product of two quaternions is bi-linear and can be expressed as two equivalent matrix products, namely
\]
\(\quad\)where \([\mathbf{q}]_{L}\) and \([\mathbf{q}]_{R}\) are respectively the left- and right- quaternion-product matrices
q_{w} & -q_{x} & -q_{y} & -q_{z} \\
q_{x} & q_{w} & -q_{z} & q_{y} \\
q_{y} & q_{z} & q_{w} & -q_{x} \\
q_{z} & -q_{y} & q_{x} & q_{w}
\end{array}\right], \quad[\mathbf{q}]_{R}=\left[\begin{array}{cccc}
q_{w} & -q_{x} & -q_{y} & -q_{z} \\
q_{x} & q_{w} & q_{z} & -q_{y} \\
q_{y} & -q_{z} & q_{w} & q_{x} \\
q_{z} & q_{y} & -q_{x} & q_{w}
\end{array}\right],
\]
\(\quad\)then
0 & -\mathbf{q}_{v}^{\top} \\
\mathbf{q}_{v} & {\left[\mathbf{q}_{v}\right]_{\times}}
\end{array}\right], \quad[\mathbf{q}]_{R}=q_{w} \mathbf{I}+\left[\begin{array}{cc}
0 & -\mathbf{q}_{v}^{\top} \\
\mathbf{q}_{v} & -\left[\mathbf{q}_{v}\right]_{\times}
\end{array}\right]
\]
VINS中旋转外参初始化的更多相关文章
- VINS(四)初始化与相机IMU外参标定
和单目纯视觉的初始化只需要获取R,t和feature的深度不同,VIO的初始化话通常需要标定出所有的关键参数,包括速度,重力方向,feature深度,以及相机IMU外参$R_{c}^{b}$和$p_{ ...
- VI ORB-SLAM初始化与VINS初始化对比(将vi orb-slam初始化方法移植到vins中)
初始化时需要求出的变量:相机和imu外参r t.重力g.尺度s.陀螺仪和加速度计偏置ba bg. 下面对两种算法初始化的详细步骤进行对比: 求陀螺仪偏置bg 求解公式相同,求解方法不同.公式如下,VI ...
- VINS 估计器之外参初始化
为何初始化外参 当外参完全不知道的时候,VINS也可以在线对其进行估计(rotation),先在processImage内进行初步估计,然后在后续优化时,会在optimize函数中再次优化. 如何初始 ...
- 相机-imu外参校准总结
1. 研究背景及相关工作 1)研究背景 单目视觉惯性slam是一种旨在跟踪移动平台的增量运动并使用来自单个车载摄像头和imu传感器的测量结果同时构建周围环境地图的技术.视觉相机和惯性测量单元(imu) ...
- 相机imu外参标定
1. 第一步初始化imu外参(可以从参数文档中读取,也可以计算出),VINS中处理如下: # Extrinsic parameter between IMU and Camera. estimate_ ...
- 解放双手——相机与IMU外参的在线标定
本文作者 沈玥伶,公众号:计算机视觉life,编辑部成员 一.相机与IMU的融合 在SLAM的众多传感器解决方案中,相机与IMU的融合被认为具有很大的潜力实现低成本且高精度的定位与建图.这是因为这两个 ...
- C++类中成员变量的初始化总结(转帖)
本文转自:C++类中成员变量的初始化总结 1. 普通的变量: 一般不考虑啥效率的情况下 可以在构造函数中进行赋值.考虑一下效率的可以再构造函数的初始化列表中进行. 1 class CA ...
- 关于map容器的元素被无参初始化
使用C++中的map容器定义一个mp,当你执行if语句判断mp[3]是否为1时,那么如果mp[3]以前不存在,此时mp[3]就会被无参初始化,second赋值为0. 以下的程序可以证明这一点.执行了第 ...
- C++类中成员变量的初始化总结
@import url(http://i.cnblogs.com/Load.ashx?type=style&file=SyntaxHighlighter.css);@import url(/c ...
- 虚机中访问外网;NAT中的POSTROUTING是怎么搞的?
看下docker中是怎么配置的网络 在虚机中访问外网:设定了qemu,在主机上添加路由:sudo iptables -t nat -I POSTROUTING -s 192.168.1.110 -j ...
随机推荐
- vue全家桶进阶之路17:组件与组件间的通信
在 Vue2 中,组件与组件之间的通信可以通过以下几种方式来实现: Props 和 Events 这是 Vue2 中最基础和常用的父子组件通信方式.父组件通过属性传递数据给子组件,子组件通过事件触发向 ...
- Create Vite App 支持 OpenTiny 啦🎉
大家好,我是 Kagol,个人公众号:前端开源星球. 一个月前,日日自新写了一篇介绍 Create Vite App 开源项目的文章: 基于vite 4.x 快速搭建开箱即用,高度可定制化模版脚手架 ...
- drf多方式登录接口(手机号、邮箱、验证码)登录
题目 ##### 3 多方式登录接口#### -使用auth的user表扩写 -用户名+密码 -手机号+密码 -邮箱+密码 -签发token逻辑,放在序列化类中写 方式一: serializer.py ...
- Dapr在Java中的实践 之 服务调用
服务调用 通过服务调用(Service-to-service Invocation),服务可以使用 gRPC 或 HTTP 这样的标准协议来发现并可靠地与其他服务通信. Dapr采用边车(Sideca ...
- JavaWeb入门必备JavaEE规范!
前言 对于学习 Java 的同学,大都是 Web 方向的.我们学习 JavaWeb 开发肯定是一个循序渐进的过程,学习前有一些前置知识要掌握,比如 JavaSE 相关知识,HTML.CSS.JavaS ...
- 慢 SQL 优化之索引的作用是什么?
前言 本文针对 MySQL 数据库的 InnoDB 存储引擎,介绍其中索引的实现以及索引在慢 SQL 优化中的作用. 本文主要讨论不同场景下索引生效与失效的原因. 慢SQL与索引的关系 慢SQL优化原 ...
- 我用numpy实现了VIT,手写vision transformer, 可在树莓派上运行,在hugging face上训练模型保存参数成numpy格式,纯numpy实现
先复制一点知乎上的内容 按照上面的流程图,一个ViT block可以分为以下几个步骤 (1) patch embedding:例如输入图片大小为224x224,将图片分为固定大小的patch,patc ...
- 【Mybatis】动态SQL
目录 动态SQL if语句 动态SQL if+where语句 动态SQL if+set语句 动态SQL choose(when,otherwise)语句 动态SQL trim语句 动态SQL SQL片 ...
- 【SpringBoot】整合Redis
1.前言 最近公司在做项目,用到了redis,,发现自己一点都不会,然后就乘闲暇时间,自己学习一些redis相关的知识,在这里分享给像我一样的初学者. 2.我的项目结构: 2.1 pom.xml &l ...
- Button按钮:得到鼠标焦点后自动放大,失去鼠标焦点后自动缩小_
作用 程序设计过程中,我们经常需要增加一些动态效果,以此改善用户的使用体验.本文将介绍一种方法,动态显示按钮状态,使其得到鼠标焦点后自动放大,失去鼠标焦点后自动缩小. 效果图 先放一张原图(鼠标还未移 ...