Ubuntu14.04(indigo)实现RGBDSLAMv2(数据集和实时Kinect)
Ubuntu14.04(indigo)实现RGBDSLAMv2(数据集和实时Kinect v2)
一、在.bag数据集上跑RGBDSLAMv2
RGBDSLAMv2指的是Felix Endres大神在2014年发表论文,实现的基于RGB-D 摄像头的SLAM系统,用于创建三维点云或者八叉树地图。
安装步骤重点参考原gitbub网址:https://github.com/felixendres/rgbdslam_v2
说明本人台式机硬件配置:
Intel(R)Core(TM)i5-6500 CPU @ 3.20GHz 3.20GHz;
RAM: 16.0GB;
GPU: NVIDIA GeForce GTX 1060 6GB。
1. 在Ubuntu14.04中安装ROS Indigo,参考网址:http://wiki.ros.org/cn/indigo/Installation/Ubuntu
2. 安装opencv2.4.9,参考网址:http://www.samontab.com/web/2014/06/installing-opencv-2-4-9-in-ubuntu-14-04-lts/
http://blog.csdn.net/baoke485800/article/details/51236198
系统更新
sudo apt-get update
sudo apt-get upgrade
安装相关依赖包
sudo apt-get install build-essential libgtk2.-dev libjpeg-dev libtiff4-dev libjasper-dev libopenexr-dev cmake python-dev python-numpy python-tk libtbb-dev libeigen3-dev yasm libfaac-dev libopencore-amrnb-dev libopencore-amrwb-dev libtheora-dev libvorbis-dev libxvidcore-dev libx264-dev libqt4-dev libqt4-opengl-dev sphinx-common texlive-latex-extra libv4l-dev libdc1394--dev libavcodec-dev libavformat-dev libswscale-dev default-jdk ant libvtk5-qt4-dev
利用wget获得Opencv2.4.9源文件,等下载完成后解压
wget http://sourceforge.net/projects/opencvlibrary/files/opencv-unix/2.4.9/opencv-2.4.9.zip
unzip opencv-2.4..zipcdopencv-2.4.9
cmake编译安装opencv源文件包
mkdir buildcdbuild
cmake -D WITH_TBB=ON -D BUILD_NEW_PYTHON_SUPPORT=ON -D WITH_V4L=ON -D INSTALL_C_EXAMPLES=ON -D INSTALL_PYTHON_EXAMPLES=ON -D BUILD_EXAMPLES=ON -D WITH_QT=ON -D WITH_OPENGL=ON -D WITH_VTK=ON ..
make -j4
sudo make install
配置opencv相关
sudo gedit /etc/ld.so.conf.d/opencv.conf
在打开的文件中(空文件也可)添加如下代码并保存
/usr/local/lib
执行以下代码
sudo ldconfig
打开另外一个文件
sudo gedit /etc/bash.bashrc
在文件末尾添加如下并保存退出
PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig
export PKG_CONFIG_PATH
检查opencv是否安装成功
cd ~/opencv-2.4./samples/c
chmod +x build_all.sh
./build_all.sh
老版本的C语言接口
./facedetect --cascade="/usr/local/share/OpenCV/haarcascades/haarcascade_frontalface_alt.xml"--scale=1.5 lena.jpg

./facedetect --cascade="/usr/local/share/OpenCV/haarcascades/haarcascade_frontalface_alt.xml"--nested-cascade="/usr/local/share/OpenCV/haarcascades/haarcascade_eye.xml" --scale=1.5 lena.jpg

新的C++接口
~/opencv-2.4./build/bin/cpp-example-grabcut ~/opencv-2.4./samples/cpp/lena.jpg

OK,测试成功。(更多测试详见上面参考网址)
opencv官网unix版本下载地址:https://sourceforge.net/projects/opencvlibrary/files/opencv-unix/
3. 安装pcl-1.7.2,使用github源码安装,地址:https://github.com/PointCloudLibrary/pcl
4. 创建catkin工作空间:
#为rgbdslam单独创建一个catkin工作空间
mkdir rgbdslam_catkin_ws
cd rgbdslam_catkin_ws
mkdir src
cd ~/rgbdslam_catkin_ws/src
#将其初始化为catkin工作空间的源码存放文件夹
catkin_init_workspace
#进入catkin工作空间目录
cd ~/rgbdslam_catkin_ws/
#编译新建的catkin工作空间,生成build、devel文件夹,形成完整的catkin工作空间
catkin_make
#调用终端配置文件
source devel/setup.bash
5. 源码安装g2o, 参考原gitbub网址:https://github.com/felixendres/rgbdslam_v2
6. 编译安装RGBDSLAMv2
#进入catkin工作空间的源码存放文件夹
cd ~/rgbdslam_catkin_ws/src
#下载github上对应ROS Indigo版本的rgbdslam源码
wget -q http://github.com/felixendres/rgbdslam_v2/archive/indigo.zip
#解压
unzip -q indigo.zip
#进入catkin工作空间目录
cd ~/rgbdslam_catkin_ws/
#ROS依赖包更新
rosdep update
yuanlibin@yuanlibin:~/rgbdslam_catkin_ws$ rosdep update
reading in sources list data from /etc/ros/rosdep/sources.list.d
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/python.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/ruby.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/releases/fuerte.yaml
Query rosdistro index https://raw.githubusercontent.com/ros/rosdistro/master/index.yaml
Add distro "groovy"
Add distro "hydro"
Add distro "indigo"
Add distro "jade"
Add distro "kinetic"
Add distro "lunar"
updated cache in /home/yuanlibin/.ros/rosdep/sources.cache
#安装rgbdslam依赖包
rosdep install rgbdslam
正确运行后显示:#All required rosdeps installed successfully
#编译rgbdslam
catkin_make
正确运行后显示:[100%] Built target rgbdslam
source devel/setup.bash
最后运行
roslaunch rgbdslam rgbdslam.launch
会出现错误:
NODES
/
rgbdslam (rgbdslam/rgbdslam) ROS_MASTER_URI=http://localhost:11311 core service [/rosout] found
ERROR: cannot launch node of type [rgbdslam/rgbdslam]: rgbdslam
ROS path []=/opt/ros/indigo/share/ros
ROS path []=/opt/ros/indigo/share
ROS path []=/opt/ros/indigo/stacks
No processes to monitor
shutting down processing monitor...
... shutting down processing monitor complete
解决方法是将工作空间的路径加到 .bashrc 文件中,如本电脑示例::
echo "source /home/yuanlibin/rgbdslam_catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
至此,RGBDSLAMv2已编译安装完成。
7. 下载TUM的.bag数据集文件,下载地址:https://vision.in.tum.de/data/datasets/rgbd-dataset/download
例如:rgbd_dataset_freiburg1_xyz.bag
查看.bag数据集的信息:
终端1
roscore
终端2
rosbag play rgbd_dataset_freiburg1_xyz.bag
终端3
rostopic info
最后的命令不要按enter键按tab键进行查看
yuanlibin@yuanlibin:~$ rostopic info /
/camera/depth/camera_info /cortex_marker_array
/camera/depth/image /imu
/camera/rgb/camera_info /rosout
/camera/rgb/image_color /rosout_agg
/clock /tf
yuanlibin@yuanlibin:~$
然后修改路径:/home/yuanlibin/rgbdslam_catkin_ws/src/rgbdslam_v2-indigo/launch下的rgbdslam.launch文件
其中第8、9行的输入数据设置
<param name="config/topic_image_mono" value="/camera/rgb/image_color"/>
<param name="config/topic_image_depth" value="/camera/depth_registered/sw_registered/image_rect_raw"/>
需要修改为上述数据集相应的信息,修改如下:
<param name="config/topic_image_mono" value="/camera/rgb/image_color"/>
<param name="config/topic_image_depth" value="/camera/depth/image"/>
在该文件中可以修改系统使用的特征:
SIFT, SIFTGPU, SURF, SURF128 (extended SURF), ORB.
8. 在数据集上跑RGBDSLAMv2
终端1
roscore
终端2
rosbag play rgbd_dataset_freiburg1_xyz.bag
终端3
roslaunch rgbdslam rgbdslam.launch
最后,就可以看到在数据集上运行RGBDSLAMv2重建的三维点云图了。
二、基于Kinect v1实时运行RGBDSLAMv2
1. 进行ROS indigo下Kinect v1的驱动安装与调试,可参考:http://www.cnblogs.com/yuanlibin/p/8608190.html
2. 在终端执行以下命令:
终端1
roscore
终端2
roslaunch rgbdslam openni+rgbdslam.launch
3. 移动Kinect v1,就可以看到实时重建的三维点云了。
三、基于Kinect v2实时运行RGBDSLAMv2
1. 运行Kinect v2 查看其输出数据信息:
终端1
roslaunch kinect2_bridge kinect2_bridge.launch
终端2(输入命令rostopic info后,不要按enter,要按table键进行查看)
yuanlibin@yuanlibin:~$ rostopic info /
/kinect2/bond
/kinect2/hd/camera_info
/kinect2/hd/image_color
/kinect2/hd/image_color/compressed
/kinect2/hd/image_color_rect
/kinect2/hd/image_color_rect/compressed
/kinect2/hd/image_depth_rect
/kinect2/hd/image_depth_rect/compressed
/kinect2/hd/image_mono
/kinect2/hd/image_mono/compressed
/kinect2/hd/image_mono_rect
/kinect2/hd/image_mono_rect/compressed
/kinect2/hd/points
/kinect2/qhd/camera_info
/kinect2/qhd/image_color
/kinect2/qhd/image_color/compressed
/kinect2/qhd/image_color_rect
/kinect2/qhd/image_color_rect/compressed
/kinect2/qhd/image_depth_rect
/kinect2/qhd/image_depth_rect/compressed
/kinect2/qhd/image_mono
/kinect2/qhd/image_mono/compressed
/kinect2/qhd/image_mono_rect
--More--
2. 在路径/home/yuanlibin/rgbdslam_catkin_ws/src/rgbdslam_v2-indigo/launch下新建一个rgbdslam_kinect2.launch文件,内容如下:
<launch>
<node pkg="rgbdslam" type="rgbdslam" name="rgbdslam" cwd="node" required="true" output="screen">
<!-- Input data settings-->
<param name="config/topic_image_mono" value="/kinect2/qhd/image_color_rect"/>
<param name="config/camera_info_topic" value="/kinect2/qhd/camera_info"/> <param name="config/topic_image_depth" value="/kinect2/qhd/image_depth_rect"/> <param name="config/topic_points" value=""/> <!--if empty, poincloud will be reconstructed from image and depth --> <!-- These are the default values of some important parameters -->
<param name="config/feature_extractor_type" value="ORB"/><!-- also available: SIFT, SIFTGPU, SURF, SURF128 (extended SURF), ORB. -->
<param name="config/feature_detector_type" value="ORB"/><!-- also available: SIFT, SURF, GFTT (good features to track), ORB. -->
<param name="config/detector_grid_resolution" value=""/><!-- detect on a 3x3 grid (to spread ORB keypoints and parallelize SIFT and SURF) --> <param name="config/optimizer_skip_step" value=""/><!-- optimize only every n-th frame -->
<param name="config/cloud_creation_skip_step" value=""/><!-- subsample the images' pixels (in both, width and height), when creating the cloud (and therefore reduce memory consumption) --> <param name="config/backend_solver" value="csparse"/><!-- pcg is faster and good for continuous online optimization, cholmod and csparse are better for offline optimization (without good initial guess)--> <param name="config/pose_relative_to" value="first"/><!-- optimize only a subset of the graph: "largest_loop" = Everything from the earliest matched frame to the current one. Use "first" to optimize the full graph, "inaffected" to optimize only the frames that were matched (not those inbetween for loops) --> <param name="config/maximum_depth" value=""/>
<param name="config/subscriber_queue_size" value=""/> <param name="config/min_sampled_candidates" value=""/><!-- Frame-to-frame comparisons to random frames (big loop closures) -->
<param name="config/predecessor_candidates" value=""/><!-- Frame-to-frame comparisons to sequential frames-->
<param name="config/neighbor_candidates" value=""/><!-- Frame-to-frame comparisons to graph neighbor frames-->
<param name="config/ransac_iterations" value=""/> <param name="config/g2o_transformation_refinement" value=""/>
<param name="config/icp_method" value="gicp"/> <!-- icp, gicp ... --> <!--
<param name="config/max_rotation_degree" value=""/>
<param name="config/max_translation_meter" value="0.5"/> <param name="config/min_matches" value=""/> <param name="config/min_translation_meter" value="0.05"/>
<param name="config/min_rotation_degree" value=""/>
<param name="config/g2o_transformation_refinement" value=""/>
<param name="config/min_rotation_degree" value=""/> <param name="config/matcher_type" value="ORB"/>
-->
</node>
</launch>
注意第3、4、5、7行的输入数据设置,应与上面查看到的信息一致。
在该文件中可以修改系统使用的特征:
SIFT, SIFTGPU, SURF, SURF128 (extended SURF), ORB.
3. 最后基于Kinect v2的实时运行RGBDSLAMv2
终端1
roslaunch rgbdslam rgbdslam_kinect2.launch
终端2
roslaunch kinect2_bridge kinect2_bridge.launch
缓慢移动Kinect v2,就可以看到实时重建的三维点云了。自己实现的三维点云截图如下:
图1所示为实验室工位的全景三维点云图;
图2所示为全景图中红点处的侧视图。
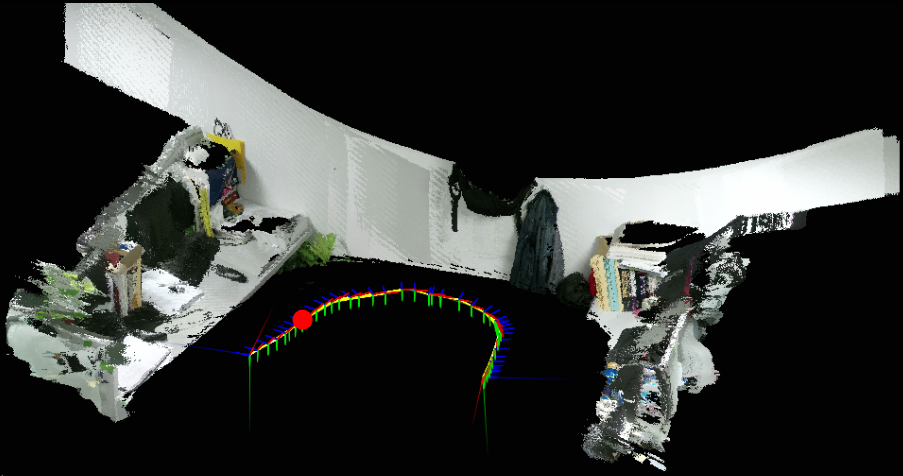
图1. 实验室工位的全景三维点云图

图2. 全景图中红点处的侧视图
Ubuntu14.04(indigo)实现RGBDSLAMv2(数据集和实时Kinect)的更多相关文章
- Ubuntu14.04下沙盒数据导入到 Neo4j 数据库(图文详解)
不多说,直接上干货! 参考博客 http://blog.csdn.net/u012318074/article/details/72793914 (表示感谢) 前期博客 Neo4j沙盒实验申请过程 ...
- ubuntu14.04 and ros indigo install kinect driver--16
摘要: 原创博客:转载请表明出处:http://www.cnblogs.com/zxouxuewei/ 今日多次测设ros indigo install kinect driver ,提示各种失败,然 ...
- ubuntu14.04 rabbitmq安装与使用 --修改RabbitMQ数据存储位置
参考:https://blog.csdn.net/tianjiewang/article/details/58383062 说明: ubuntu14.04 rabiitmq 默认 安装路径 /va ...
- Ubuntu14.04+RabbitMQ3.6.3+Golang的最佳实践
目录 [TOC] 1.RabbitMQ介绍 1.1.什么是RabbitMQ? RabbitMQ 是由 LShift 提供的一个 Advanced Message Queuing Protocol ...
- Ubuntu14.04用apt在线/离线安装CDH5.1.2[Apache Hadoop 2.3.0]
目录 [TOC] 1.CDH介绍 1.1.什么是CDH和CM? CDH一个对Apache Hadoop的集成环境的封装,可以使用Cloudera Manager进行自动化安装. Cloudera-Ma ...
- 通过rsync+inotify实现数据的实时备份
我讲到过利用rsync实现数据的镜像和备份,但是要实现数据的实时备份,单独靠rsync还不能实现,本文就讲述下如何实现数据的实时备份. 一.rsync的优点与不足 与传统的cp.tar备份方式相比,r ...
- 【一】Ubuntu14.04+Jekyll+Github Pages搭建静态博客
本系列有五篇:分别是 [一]Ubuntu14.04+Jekyll+Github Pages搭建静态博客:主要是安装方面 [二]jekyll 的使用 :主要是jekyll的配置 [三]Markdown+ ...
- Ubuntu14.04 Django Mysql安装部署全过程
Ubuntu14.04 Django Mysql安装部署全过程 一.简要步骤.(阿里云Ubuntu14.04) Python安装 Django Mysql的安装与配置 记录一下我的部署过程,也方便 ...
- Caffe+CUDA7.5+CuDNNv3+OpenCV3.0+Ubuntu14.04 配置参考文献 以及 常见编译问题总结
Caffe+CUDA7.5+CuDNNv3+OpenCV3.0+Ubuntu14.04 配置参考文献 ---- Wang Xiao Warning: Please make sure the cud ...
随机推荐
- CLSID 为 {00024500-0000-0000-C000-000000000046} 的组件失败
今天在使用 C# 操作 Excel 时,一直在报错误: 检索 COM 类工厂中 CLSID 为 {00024500-0000-0000-C000-000000000046} 的组件失败,原因是出现以下 ...
- 十六进制转换十进制(JAVA版)
解题思路路大概为:现将十六进制数转换为二进制数,再讲二进制数转换为八进制数.在进行十六进制转换为八进制时可以利用JAVA中的‘&’运算符号,一个十六进制数可以表示为四个二进制数,利用‘& ...
- js中this关键字用法详解
1.全局环境中的this 在全局环境中,this 指向全局对象Global,即 window 对象 如: alert(this); // 显示 [object Window] alert(this = ...
- jvm系列(七):jvm调优
转自:https://www.cnblogs.com/ityouknow/p/6437037.html 16年的时候花了一些时间整理了一些关于jvm的介绍文章,到现在回顾起来还是一些还没有补充全面,其 ...
- Flutter——Wrap组件(流式布局)
Wrap 可以实现流布局,单行的 Wrap 跟 Row 表现几乎一致,单列的 Wrap 则跟 Row 表现几乎一致.但 Row 与 Column 都是单行单列的,Wrap 则突破了这个限制,mainA ...
- Java学习第三天之注释
编写程序时,总需要为程序添加一些注释,用以说明某段代码的作用,或者说明某个类的用途.某个方法的功能,以及该方法的参数和返回值的数据类型及意义等. 一.为什么要添加注释? (1)便于自己理解:有些人可能 ...
- nmap中文帮助文档
简介: Nmap(“ Network Mapper ”)是用于网络探索和安全审核的开源工具.它设计用于快速扫描大型网络,尽管它可以在单个主机上正常运行.Nmap以新颖的方式使用原始IP数据包来确定网络 ...
- nginx负载均衡简单实例
nginx分配服务器策略 1.轮询(默认) 每一个请求按时间顺序逐一分配到不同的祸端服务器,如果后端服务器 down 掉,能自动抵触 2.weight(权重) weight代表权重,默认为1,权重越高 ...
- win10+CPU+Python3.6下安装pytorch
- 写在前面 最近,学习之余,想继续搞以前的深度学习.虽然电脑上已经安装配置好tensorflow,但是鉴于其学习难度较高,且我是一个忠实的Pythoner(爱所有Python化的东西),因此果断入坑 ...
- Nginx中ngx_http_headers_module
*向由代理理服务器器响应给客户端的响应报⽂文添加⾃自定义⾸首部,或修改指定⾸首部的值**指令:14.1 add_header添加⾃自定义⾸首部Syntax: add_header name value ...