octomap 安装使用
由于工程实践中需要对机器人地图进行概率化估计并表示,故引入OctoMap库。
本文将介绍如何在Ubuntu环境下安装OctoMap。
如果你安装了ROS,那么一下的安装过程很可能会出错。
首先应该检查ROS自带的octomap是什么版本的,然后安装相同的版本即可,不然会出现版本问题。
到以下目录检测ROS自带的octomap版本
/opt/ros/indigo/share/octomap/octomap-config-version.cmake
如果版本是 1.6.9
然后
git clone https://github.com/OctoMap/octomap/tree/v1.6-fixes;
最后
cmake &make.
另一种变态的方法:
sudo cmake ..
sudo make
不知道为啥也通过了,但是这样就装了两个版本。
###############################################################################################################################
1 OctoMap的下载:
使用git从github下载OctoMap库。
git clone https://github.com/OctoMap/octomap
如果系统没有安装git则输入以下指令安装git:
sudo apt-get install git
如果使用git下载OctoMap连接不上,而使用ubuntu自带的浏览器速度又很慢,推荐使用chormium去官网直接下载。
输入如下指令安装chormium:
sudo add-apt-repository ppa:a-v-shkop/chromium
sudo apt-get update
sudo apt-get install chromium
2 编译环境的安装
由于初期调试的不顺利,尝试了多个版本的ubuntu。推荐使用ubuntu16.04 32bit版本 ,当然选用老版的也都可以,我选择的版本是ubuntu 16.04 32bit 和ubuntu 14.04 32bit。
OctoMap的编译依赖于以下几个库,输入如下指令对其进行安装。
sudo apt-get install build-essential cmake doxygen libqt4-dev \
libqt4-opengl-dev libqglviewer-qt4-dev
若选择Ubuntu 16.04版本则将“libqglviewer-qt4-dev”换成“libqglviewer-dev-qt4”,若为Ubuntu 14.04版本则将“libqglviewer-qt4-dev”换成"libqglviewer-dev" 。
请对所有编译环境进行安装,尽管在部分库缺失的情况下编译也能够成功,但实际运行时程序将会报错,故老老实实的把所有库都给安装上去吧。
安装完依赖库之后进入OctoMap的文件夹中,输入如下指令对其进行编译。
cd octomap
mkdir build
cd build
cmake ..
make
3 OctoMap中Octovis的使用
编译完成接下来尝试一下OctoMap的图形显示功能,输入:
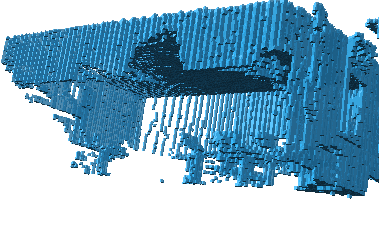
bin/octovis octomap/share/data/geb079.bt
可以看到一张基本的地图。如下是使用octovis用不同分辨率显示实验室环境的激光雷达数据。

octomap 安装使用的更多相关文章
- ROS 八叉树地图构建 - 安装 octomap 和 octomap_server 建图包!
项目要用到八叉树库 Octomap 来构建地图,这里记录下安装.可视化,并启用带颜色的 Octomap 的过程. 一.Apt 安装 Octomap 库 如果你不需要修改源码,可以直接安装编译好的 oc ...
- octomap的简介
装载自高翔博士的博客:https://www.cnblogs.com/gaoxiang12/p/5041142.html 什么是octomap? RGBD SLAM的目的有两个:估计机器人的轨迹,并建 ...
- 视觉slam十四讲开源库安装教程
目录 前言 1.Eigen线性代数库的安装 2.Sophus李代数库的安装 3.OpenCV计算机视觉库的安装 4.PCL点云库的安装 5.Ceres非线性优化库的安装 6.G2O图优化库的安装 7. ...
- SLAM拾萃(1):octomap
前言 大家好,时隔多年之后,我又开始了博客旅程.经历了很多事情之后呢,我发现自己的想法真的很简单:好好读书做课题,闲下来时写写博客,服务大家.所以我会继续写SLAM相关的博客.如果你觉得它对你有帮助, ...
- octomap相关
转载自http://blog.csdn.net/linuxarmsummary/article/details/50924947 什么是octomap? RGBD SLAM的目的有两个:估计机器人的轨 ...
- octomap建立
1.安装ros的octomap ---已完成 2.阅读相关论文,了解其机理,并编写程序实现. 参考网页:https://www.cnblogs.com/gaoxiang12/p/5041142.ht ...
- 树莓派3安装ros
树莓派3上面安装ros总结参考wiki和诸多博客安装ros仍然遇到了很多问题,重装了好几遍才成功,为了自己和其他人以后再安装ros时,不在重蹈覆辙.1.准备和说明树莓派3,安装系统Raspbian j ...
- 源码安装ROS Melodic Python3 指南 (转) + 安装记录
这篇文章转自 https://blog.csdn.net/id9502/article/details/80410989 csdn真是作大死,我保存这篇博客的时候还不需要花钱就能看,现在居然要v ...
- docker——容器安装tomcat
写在前面: 继续docker的学习,学习了docker的基本常用命令之后,我在docker上安装jdk,tomcat两个基本的java web工具,这里对操作流程记录一下. 软件准备: 1.jdk-7 ...
随机推荐
- 数据库左右连接on后的限制条件问题
测试环境: MySQL 5.7.19 HeidiSQL 9.3 数据库界面连接工具(挺好用的) 碰到的问题是: Select * from t1 left outer join t2 on t1.id ...
- MT【89】三棱锥的体积公式
评:已知对棱的距离以及此对棱边长,夹角就可以求出该三棱锥的体积.这把三棱锥的放到平行六面体里的做法是非常常见的.
- HNOI2018滚粗记
day 0 最近发现机房的人都有些焦虑(除了一些神犇)自己也被影响地紧张起来 唉,不知道是不是一种好的心态,紧张是必然的... 随便打了点板子(\(FFT,SA,LCT\)) 很棒一个都没考 day ...
- Nginx, HTTPS的配置
server {listen 443; ####HTTPS指定端口server_name www.web.com; #####域名或者IP root /data/wwwroot/l ...
- Hdoj 1009.FatMouse' Trade 题解
Problem Description FatMouse prepared M pounds of cat food, ready to trade with the cats guarding th ...
- 安装 Minio服务
#MINIO SERVER Minio是在Apache License v2.0下发布的对象存储服务器.它与Amazon S3云存储服务兼容. 它最适合存储非结构化数据,如照片,视频,日志文件,备份和 ...
- /dev/null与/dev/zero区别
/dev/null和/dev/zero的区别 /dev/null,外号叫无底洞,你可以向它输出任何数据,它通吃,并且不会撑着! /dev/zero,是一个输入设备,你可你用它来初始化文件.该设备无穷尽 ...
- suoi07 区间平均++ (二分答案+前缀和)
https://www.vijos.org/d/SUOI/p/59dc5af7d3d8a1361ae62b97 二分一个答案,然后做一做前缀和,用满足区间大小的最小值减一减,判断答案合不合法 然而还要 ...
- A1031. Hello World for U
Given any string of N (>=5) characters, you are asked to form the characters into the shape of U. ...
- shiro+SpringMVC 项目 配置404页面
说的配置404,大家都会想到去web.xml里面配置 <error-page> <error-code></error-code> <location> ...