【翻译】Kinect v2程序设计(C++) Color篇
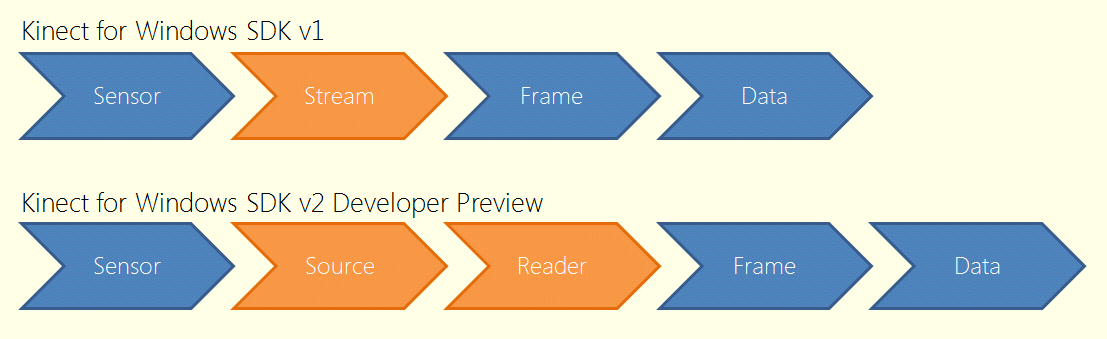
Kinect SDK v2预览版,获取数据的基本流程的说明。以及取得Color图像的示例程序的介绍。
// Sensor
IKinectSensor* pSensor; ……
HRESULT hResult = S_OK;
hResult = GetDefaultKinectSensor( &pSensor ); ……
if( FAILED( hResult ) ){
std::cerr << "Error : GetDefaultKinectSensor" << std::endl;
return -;
}
hResult = pSensor->Open(); ……
if( FAILED( hResult ) ){
std::cerr << "Error : IKinectSensor::Open()" << std::endl;
return -;
}列表1.1 相当于图1「Sensor」的部分1 处理Kinect v2预览版的Sensor接口。2 取得默认的Sensor。3 打开Sensor。
从「Sensor」取得「Source」。
// Source
IColorFrameSource* pColorSource; ……
hResult = pSensor->get_ColorFrameSource( &pColorSource ); ……
if( FAILED( hResult ) ){
std::cerr << "Error : IKinectSensor::get_ColorFrameSource()" << std::endl;
return -;
}列表1.2 相当于图1「Source」的部分1 获取Color Frame的Source接口。2 从Sensor取得Source。
// Reader
IColorFrameReader* pColorReader; ……
hResult = pColorSource->OpenReader( &pColorReader ); ……
if( FAILED( hResult ) ){
std::cerr << "Error : IColorFrameSource::OpenReader()" << std::endl;
return -;
}列表1.3 相当于图1「Reader」的部分1 获取Color Frame的Reader接口。2 从Source打开Reader。
int width = ; ……
int height = ; ……
unsigned int bufferSize = width * height * * sizeof( unsigned char ); ……
cv::Mat bufferMat( height, width, CV_8UC4 ); ……
cv::Mat colorMat( height / , width / , CV_8UC4 ); ……
cv::namedWindow( "Color" );
while( ){
// Frame
IColorFrame* pColorFrame=nullptr; ……
hResult=pColorReader->AcquireLatestFrame( &pColorFrame ); ……
if( SUCCEEDED( hResult ) ){
hResult = pColorFrame->CopyConvertedFrameDataToArray( bufferSize, reinterpret_cast<BYTE*>( bufferMat.data ), ColorImageFormat_Bgra ); ……
if( SUCCEEDED( hResult ) ){
cv::resize( bufferMat, colorMat, cv::Size(), 0.5, 0.5 ); ……
}
}
SafeRelease( pColorFrame );
// Show Window
cv::imshow( "Color", colorMat );
if( cv::waitKey( ) == VK_ESCAPE ){
break;
}
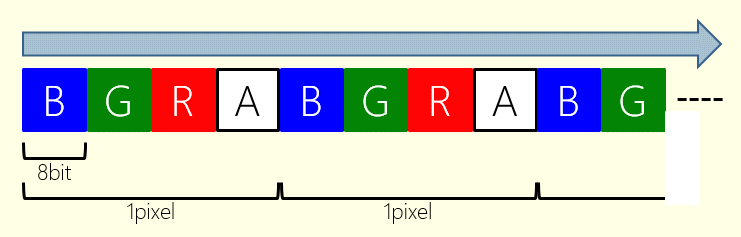
}列表1.4 相当于图1「Frame」,「Data」的部分1 Color图像的尺寸(1920×1080)。这里为了简化说明,画像尺寸用硬编码来设定,示例程序可以从Source取得着Frame信息。2 Color图像的数据尺寸。3 为了处理Color图像,准备OpenCV的cv::Mat。「bufferMat」是原始的图像数据,「colorMat」是Resize图像数据的处理。「CV_8UC4」,是无符号8bit整数(8U),4个channel(C4)并列来表现1个像素的数据格式。4 取得Color图像的Frame接口。5 从Reader取得最新的Frame。6 从Frame取得Color图像。默认的格式是YUY2(亮度与色差表现的格式),不过可以经过简单处理变换为BGRA。7 缩小为长宽各一半的尺寸(960×540)。

【翻译】Kinect v2程序设计(C++) Color篇的更多相关文章
- 【翻译】Kinect v2程序设计(C++) Body 篇
Kinect SDK v2预览版的主要功能的使用介绍,基本上完成了.这次,是关于取得Body(人体姿势)方法的说明. 上一节,是使用Kinect SDK v2预览版从Kinect v2预览版取得B ...
- 【翻译】Kinect v2程序设计(C++-) AudioBeam篇
Kinect v2,Microphone Array可以用来对于水平面音源方向的推测(AudioBeam)和语音识别(Speech Recognition).这一节是介绍如何取得AudioBeam. ...
- 【翻译】Kinect v2程序设计(C++) BodyIndex篇
通过Kinect SDK v2预览版,取得BodyIndex(人体区域)的方法和示例代码. 上一节,介绍了从Kinect v2预览版用Kinect SDK v2预览版获取Depth数据的方法. 这 ...
- 【翻译】Kinect v2程序设计(C++) Depth编
Kinect SDK v2预览版,取得Depth数据的方法说明. 上一节,介绍了通过使用Kinect for Windows SDK v2预览版(以下简称为,Kinect SDK v2预览版)从Kin ...
- 【翻译】Kinect v1和Kinect v2的彻底比较
本连载主要是比较Kinect for Windows的现行版(v1)和次世代型的开发者预览版(v2),以C++开发者为背景介绍进化的硬件和软件.本文主要是对传感的配置和运行条件进行彻底的比较. ...
- 【计算机视觉】深度相机(五)--Kinect v2.0
原文:http://blog.csdn.NET/qq1175421841/article/details/50412994 ----微软Build2012大会:Kinect for Windows P ...
- Ubuntu_ROS中应用kinect v2笔记
Ubuntu_ROS中应用kinect v2笔记 个人觉得最重要的资料如下: 1. Microsoft Kinect v2 Driver Released http://www.ros.org/new ...
- 【计算机视觉】深度相机(六)--Kinect v2.0 手势样本库制作
目录为1.如何使用Kinect Studio录制手势剪辑:2.如何使用Visual Gesture Builder创建手势项目:3.如何在我的C#程序中使用手势:4.关于录制.剪辑手势过程中的注意事项 ...
- Kinect v2.0 for windows开发环境说明
官方文档里是这些: Supported Operating Systems and Architectures The following operating systems and architec ...
随机推荐
- svn 创建
1.ps aux | grep svn 杀掉进程 2.svnadmin create /svnrepertory/SVNwangping 创建svn仓库; 3.修改3个文件 4.svnserve -d ...
- 微信api退款操作
状况:证书加载进去,本地调试退款成功,然而发不到iis上却是不成功. 分析:定然是iis配置问题. 问题一:证书加载不进去,出现“内部错误” 解决:在iis中找到对应的应用连接池,右键高级设置,找到“ ...
- rabbitMq使用(mac平台)
1.下载 wget http://www.rabbitmq.com/releases/rabbitmq-server/v3.5.3/rabbitmq-server-mac-standalone-3.5 ...
- 每个人都应该知晓的8项Resharper快捷键
(此文章同时发表在本人微信公众号“dotNET每日精华文章”) 如果你已经在用Resharper这个编程神器(机器杀手)的话,那么为了进一步提高工作效率熟悉它的一些特殊特性和快捷键那是必须的. Res ...
- 【log4j2 加载配置文件】 加载配置文件的三种方法
log4j 2读取的配置文件可以分为三类:src下的配置文件.绝对路径的配置文件.相对路径的配置文件. package com.herman.test; import java.io.File; im ...
- Loadrunner 关联 web_custom_request综合实例
Loadrunner 关联 web_custom_request综合实例 Loadrunner 关联web_custom_request,针对自带的订票系统的一个综合实例,相信看了本文大家对学习loa ...
- ZOJ1232 Adventure of Super Mario(DP+SPFA)
dp[u][t]表示从起点出发,到达i点且用了t次magic boot时的最短时间, 方程如下: dp[v][t]=min(dp[v][t],dp[u][t]+dis[u][v]); dp[v][t] ...
- IOS 怎么设置UIButton UITextField 不可点击且变灰
[button setEnable:NO]; [button setAlpha:0.4];
- [Cocos2d-x For WP8]Hello world
[Cocos2d-x For WP8]Hello world Cocos2d-x For WP8使用C++开发,使用cocos2d-xv0.13同样的接口,Cocos2d-x For WP8的相关项目 ...
- 【POJ】3255 Roadblocks(次短路+spfa)
http://poj.org/problem?id=3255 同匈牙利游戏. 但是我发现了一个致命bug. 就是在匈牙利那篇,应该dis2单独if,而不是else if,因为dis2和dis1相对独立 ...