深度强化学习中稀疏奖励问题Sparse Reward
Sparse Reward
推荐资料
强化学习算法在被引入深度神经网络后,对大量样本的需求更加明显。如果智能体在与环境的交互过程中没有获得奖励,那么该样本在基于值函数和基于策略梯度的损失中的贡献会很小。
针对解决稀疏奖励问题的研究主要包括:1
Reward Shaping:奖励设计与学习
经验回放机制
探索与利用
多目标学习和辅助任务
1. Reward Shaping
人为设计的 “密集”奖励。
例如,在机械臂“开门”的任务中,原始的稀疏奖励设定为:若机械臂把门打开,则给予“+1”奖励,其余情况下均给予“0”奖励。然而,由于任务的复杂性,机械臂从随机策略开始,很难通过自身探索获得奖励。为了简化训练过程,可以使用人为设计的奖励:1)在机械臂未碰到门把手时,将机械臂与门把手距离的倒数作为奖励;2)当机械臂接触门把手时,给予“+0.1”奖励;3)当机械臂转动门把手时,给予“+0.5”奖励;4)当机械臂完成开门时,给予“+1”奖励。这样,通过人为设计的密集奖励,可以引导机械臂完成开门的操作,简化训练过程。
2. 逆向强化学习
针对人为设计奖励中存在的问题,Ng等2提出了从最优交互序列中学习奖励函数的思路,此类方法称为”逆强化学习”。
3. 探索与利用(好奇法):
在序列决策中,智能体可能需要牺牲当前利益来选择非最优动作,期望能够获得更大的长期回报。
在 DRL领域中使用的探索与利用方法主要包括两类:基于计数的方法和基于内在激励的方法。其目的是构造虚拟奖励,用于和真实奖励函数共同学习。由于真实的奖励是稀疏的,使用虚拟奖励可以加快学习的进程。
ICM3(逆环境模型)—— 改进的基于内在激励的方法
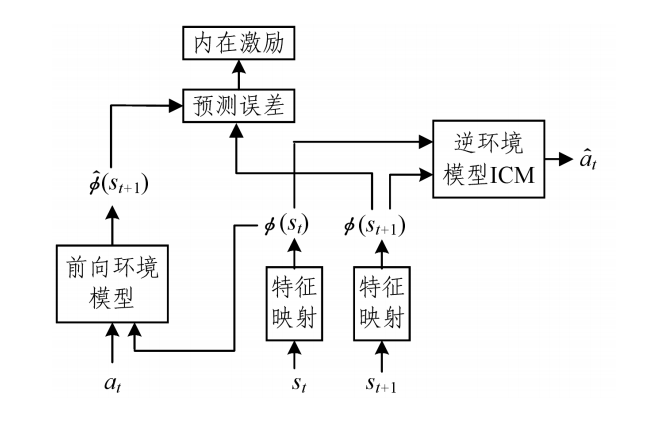
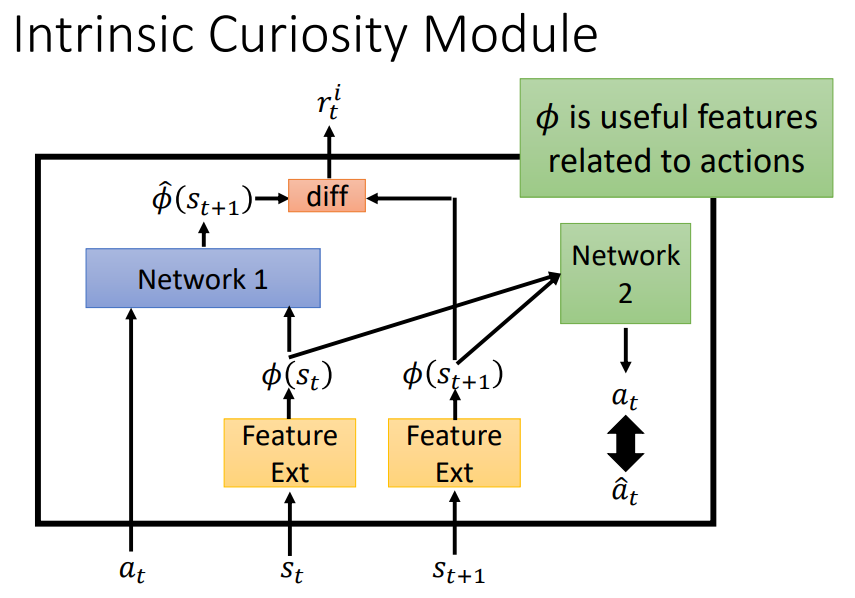
- Network 1:预测的状态S与实际状态S差别越大,回报r越大,鼓励冒险
- Network 2:输入 \(S_t\) 和 \(S_{t+1}\) ,预测动作 \(a_t\) ,与真实动作差别大时,表示无关紧要的状态。
- ICM 通过学习可以在特征空间中去除与预测动作无关的状态特征,在特征空间中构建环境模型可以去除环境噪声。
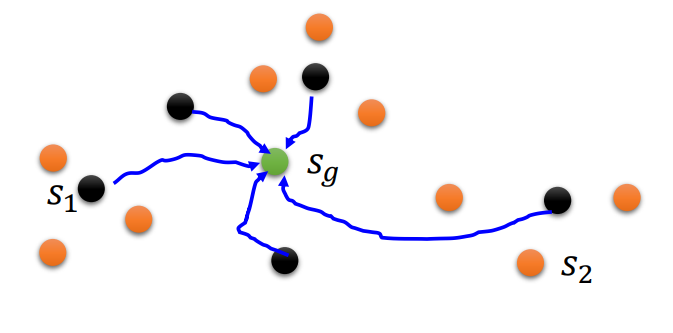
4. 多目标学习——层次强化学习
- 智能体可以从已经到达的位置来获得奖励。在训练中使用虚拟目标替代原始目标,使智能体即使在训练初期也能很快获得奖励,极大地加速了学习过程。
- 将一个单一目标,拆解为多个阶段的多层级的目标。
5. 辅助任务
在稀疏奖励情况下,当原始任务难以完成时,往往可以通过设置辅助任务的方法加速学习和训练。
Curriculum Learning,“课程式”强化学习:
当完成原始任务较为困难时,奖励的获取是困难的。此时,智能体可以先从简单的、相关的任务开始学习,然后不断增加任务的难度,逐步学习更加复杂的任务。
- 直接添加辅助任务:第二类方法是直接在原任务的基础上添加并行的辅助任 务,原任务和辅助任务共同学习。
参考文献
深度强化学习中稀疏奖励问题Sparse Reward的更多相关文章
- (转) 深度强化学习综述:从AlphaGo背后的力量到学习资源分享(附论文)
本文转自:http://mp.weixin.qq.com/s/aAHbybdbs_GtY8OyU6h5WA 专题 | 深度强化学习综述:从AlphaGo背后的力量到学习资源分享(附论文) 原创 201 ...
- 5G网络的深度强化学习:联合波束成形,功率控制和干扰协调
摘要:第五代无线通信(5G)支持大幅增加流量和数据速率,并提高语音呼叫的可靠性.在5G无线网络中共同优化波束成形,功率控制和干扰协调以增强最终用户的通信性能是一项重大挑战.在本文中,我们制定波束形成, ...
- 【资料总结】| Deep Reinforcement Learning 深度强化学习
在机器学习中,我们经常会分类为有监督学习和无监督学习,但是尝尝会忽略一个重要的分支,强化学习.有监督学习和无监督学习非常好去区分,学习的目标,有无标签等都是区分标准.如果说监督学习的目标是预测,那么强 ...
- 一文读懂 深度强化学习算法 A3C (Actor-Critic Algorithm)
一文读懂 深度强化学习算法 A3C (Actor-Critic Algorithm) 2017-12-25 16:29:19 对于 A3C 算法感觉自己总是一知半解,现将其梳理一下,记录在此,也 ...
- 深度强化学习资料(视频+PPT+PDF下载)
https://blog.csdn.net/Mbx8X9u/article/details/80780459 课程主页:http://rll.berkeley.edu/deeprlcourse/ 所有 ...
- 深度强化学习day01初探强化学习
深度强化学习 基本概念 强化学习 强化学习(Reinforcement Learning)是机器学习的一个重要的分支,主要用来解决连续决策的问题.强化学习可以在复杂的.不确定的环境中学习如何实现我们设 ...
- 深度强化学习(DQN-Deep Q Network)之应用-Flappy Bird
深度强化学习(DQN-Deep Q Network)之应用-Flappy Bird 本文系作者原创,转载请注明出处:https://www.cnblogs.com/further-further-fu ...
- 深度强化学习(Deep Reinforcement Learning)入门:RL base & DQN-DDPG-A3C introduction
转自https://zhuanlan.zhihu.com/p/25239682 过去的一段时间在深度强化学习领域投入了不少精力,工作中也在应用DRL解决业务问题.子曰:温故而知新,在进一步深入研究和应 ...
- 深度强化学习(DRL)专栏(一)
目录: 1. 引言 专栏知识结构 从AlphaGo看深度强化学习 2. 强化学习基础知识 强化学习问题 马尔科夫决策过程 最优价值函数和贝尔曼方程 3. 有模型的强化学习方法 价值迭代 策略迭代 4. ...
随机推荐
- 【模拟7.16】通讯(tarjan缩点加拓扑排序)
这题确实水,纯板子,考试意外出错,只拿了暴力分QAQ tarjan缩点加上拓扑排序,注意这里求最短路径时不能用最小生成树 因为是单向边,不然就可能不是一个联通图了.... 1 #include< ...
- 佛祖保佑永无BUG 神兽护体 代码注释(各种版本)
佛祖保佑 永无BUG /* _ooOoo_ o8888888o 88" . "88 (| -_- |) O\ = /O ____/`---'\____ .' \\| |// `. ...
- Vue前端基础学习
vue-cli vue-cli 官方提供的一个脚手架(预先定义好的目录结构及基础代码,咱们在创建Maven项目的时可以选择创建一个骨架项目,这个骨架项目就是脚手架),用于快速生成一个vue项目模板 主 ...
- 对volatile的理解--从JMM以及单例模式剖析
请谈谈你对volatile的理解 1.volitale是Java虚拟机提供的一种轻量级的同步机制 三大特性1.1保证可见性 1.2不保证原子性 1.3禁止指令重排 首先保证可见性 1.1 可见性 概念 ...
- linux密码策略
1.密码过期策略 # vim /etc/login.defs PASS_MAX_DAYS 99999 # 一个密码最长可以使用的天数: PASS_MIN_DAYS 0 # 更换密码的最小天数: PAS ...
- 使用VS调试时出现 :provider: Named Pipes Provider, error: 40 - 无法打开到 SQL Server 的连接 解决方案
首先检查链接的数据库名称是否正确 其二是看看你的主机名称由没有写对,有些写成 127.0.0.1会出错.我就是将sessionState中的127.0.0.1出错,改为自己的主机名称就OK啦
- LeetCode解题记录(贪心算法)(一)
1. 前言 目前得到一本不错的算法书籍,页数不多,挺符合我的需要,于是正好借这个机会来好好的系统的刷一下算法题,一来呢,是可以给部分同学提供解题思路,和一些自己的思考,二来呢,我也可以在需要复习的时候 ...
- Python小白的数学建模课-B5. 新冠疫情 SEIR模型
传染病的数学模型是数学建模中的典型问题,常见的传染病模型有 SI.SIR.SIRS.SEIR 模型. 考虑存在易感者.暴露者.患病者和康复者四类人群,适用于具有潜伏期.治愈后获得终身免疫的传染病. 本 ...
- 【面试】详解同步/异步/阻塞/非阻塞/IO含义与案例
本文详解同步.异步.阻塞.非阻塞,以及IO与这四者的关联,毕竟我当初刚认识这几个名词的时候也是一脸懵. 目录 1.同步阻塞.同步非阻塞.异步阻塞.异步非阻塞 1.同步 2.异步 3.阻塞 4.非阻塞 ...
- Camunda工作流引擎简单入门
官网:https://camunda.com/ 官方文档:https://docs.camunda.org/get-started/spring-boot/project-setup/ 阅读新体验:h ...