OpenCV开发笔记(五十六):红胖子8分钟带你深入了解多种图形拟合逼近轮廓(图文并茂+浅显易懂+程序源码)
若该文为原创文章,未经允许不得转载
原博主博客地址:https://blog.csdn.net/qq21497936
原博主博客导航:https://blog.csdn.net/qq21497936/article/details/102478062
本文章博客地址:https://blog.csdn.net/qq21497936/article/details/106180872
各位读者,知识无穷而人力有穷,要么改需求,要么找专业人士,要么自己研究
红胖子(红模仿)的博文大全:开发技术集合(包含Qt实用技术、树莓派、三维、OpenCV、OpenGL、ffmpeg、OSG、单片机、软硬结合等等)持续更新中…(点击传送门)
上一篇:《OpenCV开发笔记(五十五):红胖子8分钟带你深入了解Haar、LBP特征以及级联分类器识别过程(图文并茂+浅显易懂+程序源码)》
下一篇:《OpenCV开发笔记(五十七):红胖子8分钟带你深入了解直方图反向投影(图文并茂+浅显易懂+程序源码)》
前言
红胖子,来也!
识别目标,可以通过图形拟合,将目标提取出来。
Demo

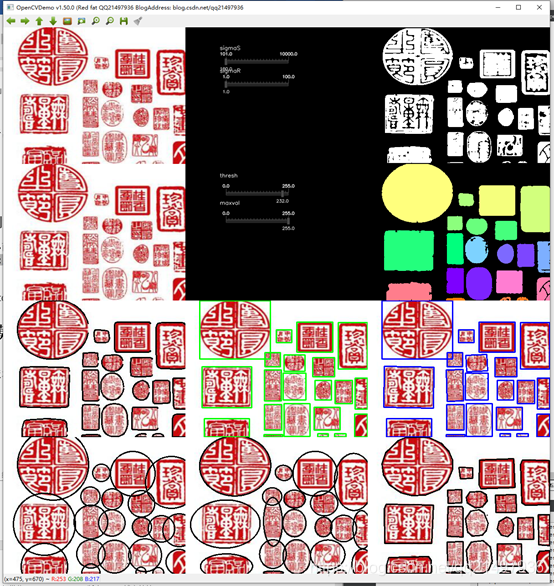
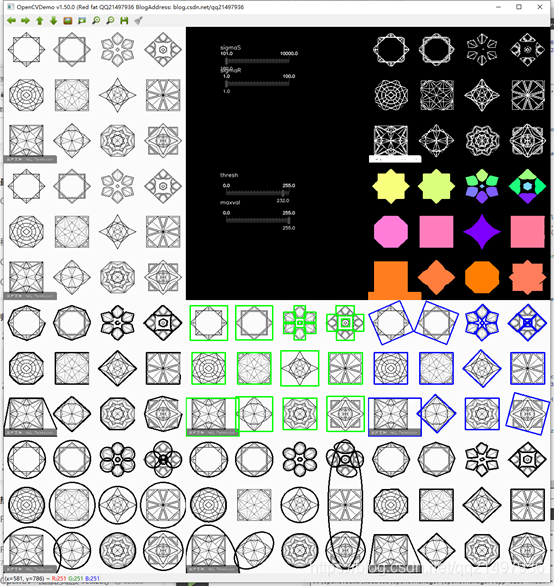
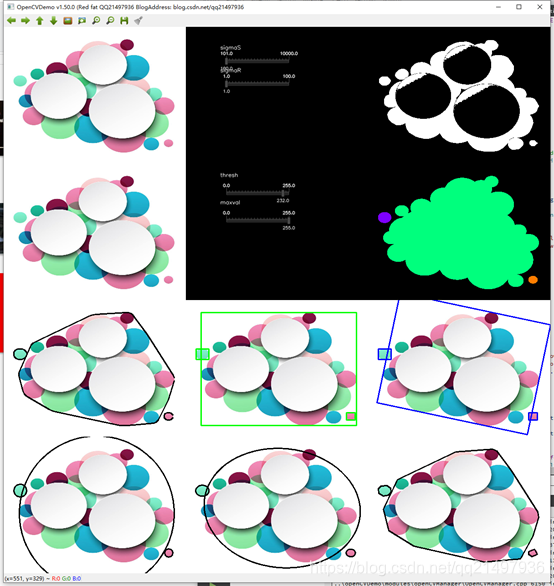
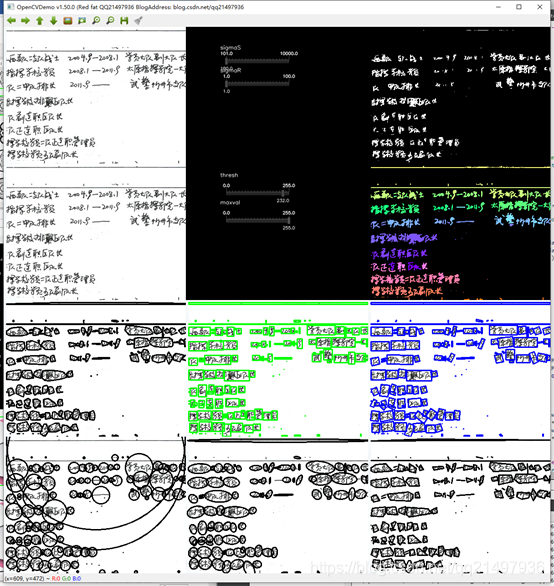
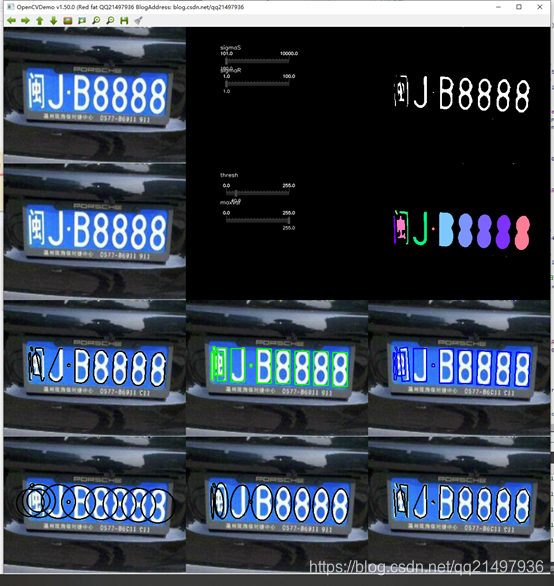
寻找轮廓
寻找轮廓凸包
对轮廓凸包进行多图形拟合
概述
寻找轮廓之后,openCV提供了对输入点集合进行多种图形进行拟合的方法,基本都是输入之前寻找凸包后再进行操作,当然也可以直接对了轮廓进行操作。
识别不同的目标物体,根据形状可以剔除,还可以做很多其他的操作,比如车牌识别,提取车牌号码,那么直接可以拿到每个车牌字符的矩形,直接对矩形进行roi,然后在进行下一步的识别操作(补充:这部分可以拿到坐标后,自己写算法也是一样,看个人习惯)。
返回包围的矩形函数原型
(返回的是水平的矩形)
Rect boundingRect( InputArray points );
- 参数一:InputArray类型的points,二维点(轮廓顶点)的轮廓输入向量,存储在std::vector或Mat中;
返回包围的最小面积矩形函数原型
(最小面积则其返回的矩形基本都是旋转的,注意返回的类型)
RotatedRect minAreaRect( InputArray points );
- 参数一:InputArray类型的points,二维点(轮廓顶点)的轮廓输入向量,存储在std::vector或Mat中;
返回包围的圆形函数原型
void minEnclosingCircle( InputArray points,Point2f& center,float& radius );
- 参数一:InputArray类型的points,二维点(轮廓顶点)的轮廓输入向量,存储在std::vector或Mat中;
- 参数二:Point2f类型的center,返回圆形的中心点;
- 参数三:float类型的radius,返回圆形的半径;
返回包围的最小椭圆函数原型
(注意:至少需要输入6个点)
RotatedRect fitEllipse( InputArray points );
- 参数一:InputArray类型的points,二维点(轮廓顶点)的轮廓输入向量,存储在std::vector或Mat中(至少要6个点);
返回提取四个点的代码:
cv::RotatedRect rotateRect = cv::minAreaRect(hullPoints);cv::Point2f vertex[4];rotateRect.points(vertex);
返回包围的多边形拟合函数原型
void approxPolyDP( InputArray curve,OutputArray approxCurve,double epsilon,bool closed );
- 参数一:InputArray类型的curve,二维点(轮廓顶点)的轮廓输入向量,存储在std::vector或Mat中;
- 参数二:OutputArray类型的approxCurve;输出多边形结果std::vector<cv::Point2f>;
- 参数三:double类型的epsilon,指定近似精度。这是最大距离;
- 参数四:bool类型的closed,如果为真,则近似曲线是闭合的(其第一个顶点和最后一个顶点是已连接)。否则,它不会关闭。
返回包围的最小三角形函数原型
double minEnclosingTriangle( InputArray points, OutputArray triangle );
- 参数一:InputArray类型的points,二维点(轮廓顶点)的轮廓输入向量,存储在std::vector或Mat中;
- 参数二:OutputArray类型triangle,返回三角形;
Demo源码
void OpenCVManager::testFitting(){QString fileName1 ="E:/qtProject/openCVDemo/openCVDemo/modules/openCVManager/images/10.jpg";cv::Mat srcMat = cv::imread(fileName1.toStdString());cv::Mat dstMat;int width = 400;int height = 300;cv::resize(srcMat, srcMat, cv::Size(width, height));cv::String windowName = _windowTitle.toStdString();cvui::init(windowName);cv::Mat windowMat = cv::Mat(cv::Size(srcMat.cols * 3,srcMat.rows * 4),srcMat.type());int sigmaS = 100;int sigmaR = 1.0;int thresh = 232;int maxval = 255;while(true){// 刷新全图黑色windowMat = cv::Scalar(0, 0, 0);// 原图复制cv::Mat mat = windowMat(cv::Range(srcMat.rows * 0, srcMat.rows * 1),cv::Range(srcMat.cols * 0, srcMat.cols * 1));cv::addWeighted(mat, 0.0f, srcMat, 1.0f, 0.0f, mat);cv::Mat tempMat;{{cvui::printf(windowMat, 75 + width * 1, 40 + height * 0, "sigmaS");cvui::trackbar(windowMat, 75 + width * 1, 50 + height * 0, 165, &sigmaS, 101, 10000);cvui::printf(windowMat, 75 + width * 1, 90 + height * 0, "sigmaR");cvui::trackbar(windowMat, 75 + width * 1, 100, 165 + height * 0, &sigmaR, 1, 100);// 使用自适应流形应用高维滤波。cv::Ptr<cv::ximgproc::AdaptiveManifoldFilter> pAdaptiveManifoldFilter= cv::ximgproc::createAMFilter(sigmaS/100.0f, sigmaR/100.0f, true);pAdaptiveManifoldFilter->filter(srcMat, tempMat);// 效果图copymat = windowMat(cv::Range(srcMat.rows * 1, srcMat.rows * 2),cv::Range(srcMat.cols * 0, srcMat.cols * 1));cv::addWeighted(mat, 0.0f, tempMat, 1.0f, 0.0f, mat);}// 转为灰度图像cv::cvtColor(tempMat, tempMat, cv::COLOR_BGR2GRAY);// 车牌时,对灰度图取反操作// tempMat = ~tempMat;{// 调整阈值化的参数threshcvui::printf(windowMat, 75 + width * 1, 20 + height * 1, "thresh");cvui::trackbar(windowMat, 75 + width * 1, 40 + height * 1, 165, &thresh, 0, 255);// 调整阈值化的参数maxvalcvui::printf(windowMat, 75 + width * 1, 80 + height * 1, "maxval");cvui::trackbar(windowMat, 75 + width * 1, 100 + height * 1, 165, &maxval, 0, 255);// 阈值化,注意:此处使用了THRESH_BINARY_INV,白色是255,255,255所以反转阈值化cv::threshold(tempMat, tempMat, thresh, maxval, cv::THRESH_BINARY_INV);// 效果图copymat = windowMat(cv::Range(srcMat.rows * 0, srcMat.rows * 1),cv::Range(srcMat.cols * 2, srcMat.cols * 3));// 转换图像cv::Mat grayMat;cv::cvtColor(tempMat, grayMat, cv::COLOR_GRAY2BGR);cv::addWeighted(mat, 0.0f, grayMat, 1.0f, 0.0f, mat);}// 寻找轮廓{std::vector<std::vector<cv::Point>> contours;std::vector<cv::Vec4i> hierarchy;// 查找轮廓:RETR_EXTERNAL-最外层轮廓cv::findContours(tempMat, contours, hierarchy, cv::RETR_EXTERNAL, cv::CHAIN_APPROX_SIMPLE);// 遍历所有顶层轮廓,并绘制出来dstMat = srcMat.clone();cv::Mat emptyMat = srcMat.clone();emptyMat = cv::Scalar(0,0,0);// 拟合矩形框cv::Mat fittingRectMat = srcMat.clone();cv::Mat fittingMinAreaRectMat = srcMat.clone();cv::Mat fittingMinAreaCircleMat = srcMat.clone();cv::Mat fittingEllipseMat = srcMat.clone();cv::Mat fittingPolyMat = srcMat.clone();// 轮廓contours[i]对应4个hierarchy元素hierarchy[i][0]~ hierarchy[i][3],// hierarchy[i][0]表示后一个轮廓的索引编号// hierarchy[i][1]前一个轮廓的索引编号// hierarchy[i][2]父轮廓的索引编号// hierarchy[i][3]内嵌轮廓的索引编号for(int index = 0; index >=0; index = hierarchy[index][0]){if(hierarchy.size() <= 0){break;}cv::Scalar color;if(index < hierarchy.size() / 3){color = cv::Scalar(250 / (hierarchy.size() / 3) * index, 125, 255);}else if(index < hierarchy.size() / 3 * 2){color = cv::Scalar(255, 250 / (hierarchy.size() / 3) * (index - hierarchy.size() / 3), 125);}else{color = cv::Scalar(125, 255, 250 / (hierarchy.size() / 3 == 0 ? 1 :hierarchy.size() / 3) * (index - hierarchy.size() / 3 * 2));}// 绘制轮廓里面的第几个cv::drawContours(emptyMat, contours, index, color, CV_FILLED, 8, hierarchy);// 寻找最大凸包std::vector<cv::Point> hullPoints;std::vector<int> hullIndex;cv::convexHull(contours[index], hullPoints, false, true);cv::convexHull(contours[index], hullIndex, false, false);// 绘制凸包包围线for(int index2 = 1; index2 < hullPoints.size(); index2++){cv::line(mat, hullPoints.at(index2 - 1), hullPoints.at(index2), cv::Scalar(0, 0, 0), 2);cv::line(dstMat, hullPoints.at(index2 - 1), hullPoints.at(index2), cv::Scalar(0, 0, 0), 2);}qDebug() << __FILE__ << __LINE__ << "index =" << index << "total =" << hierarchy.size();// 使用形状拟合// 使用外部包围矩形{cv::Rect rect = cv::boundingRect(hullPoints);cv::rectangle(fittingRectMat, rect, cv::Scalar(0, 255, 0), 2);}// 使用外部最小包围矩形{cv::RotatedRect rotateRect = cv::minAreaRect(hullPoints);cv::Point2f vertex[4];rotateRect.points(vertex);for(int index = 0; index < 4; index++){cv::line(fittingMinAreaRectMat, vertex[index % 4], vertex[(index + 1) % 4], cv::Scalar(255, 0, 0), 2);}}// 使用外部包围圆形(圆形就是最小了,不存在形变){cv::Point2f center;float radius;cv::minEnclosingCircle(hullPoints, center, radius);cv::circle(fittingMinAreaCircleMat, center, radius, cv::Scalar(0, 0, 0), 2);}// 使用外部椭圆拟合:至少要6个点{qDebug() << __FILE__ << __LINE__ << hullPoints.size();if(hullPoints.size() >= 6){cv::RotatedRect rotateRect = cv::fitEllipse(hullPoints);cv::ellipse(fittingEllipseMat, rotateRect, cv::Scalar(0, 0, 0), 2);}}// 使用多边形拟合{std::vector<cv::Point> polyPoints;cv::approxPolyDP(hullPoints, polyPoints, 3, true);std::vector<std::vector<cv::Point>> contour;contour.push_back(polyPoints);cv::drawContours(fittingPolyMat, contour, 0, cv::Scalar(0, 0, 0), 2);}}// 效果图copy:轮廓图mat = windowMat(cv::Range(srcMat.rows * 1, srcMat.rows * 2),cv::Range(srcMat.cols * 2, srcMat.cols * 3));cv::addWeighted(mat, 0.0f, emptyMat, 1.0f, 0.0f, mat);// 效果图copy:对已知轮廓进行最大凸包检测mat = windowMat(cv::Range(srcMat.rows * 2, srcMat.rows * 3),cv::Range(srcMat.cols * 0, srcMat.cols * 1));cv::addWeighted(mat, 0.0f, dstMat, 1.0f, 0.0f, mat);// 效果图copy:黑色图拟合矩形mat = windowMat(cv::Range(srcMat.rows * 2, srcMat.rows * 3),cv::Range(srcMat.cols * 1, srcMat.cols * 2));cv::addWeighted(mat, 0.0f, fittingRectMat, 1.0f, 0.0f, mat);// 效果图copy:原图拟合矩形mat = windowMat(cv::Range(srcMat.rows * 2, srcMat.rows * 3),cv::Range(srcMat.cols * 1, srcMat.cols * 2));cv::addWeighted(mat, 0.0f, fittingRectMat, 1.0f, 0.0f, mat);// 效果图copy:原图拟合最小矩形mat = windowMat(cv::Range(srcMat.rows * 2, srcMat.rows * 3),cv::Range(srcMat.cols * 2, srcMat.cols * 3));cv::addWeighted(mat, 0.0f, fittingMinAreaRectMat, 1.0f, 0.0f, mat);// 效果图copy:原图拟合最小圆形mat = windowMat(cv::Range(srcMat.rows * 3, srcMat.rows * 4),cv::Range(srcMat.cols * 0, srcMat.cols * 1));cv::addWeighted(mat, 0.0f, fittingMinAreaCircleMat, 1.0f, 0.0f, mat);// 效果图copy:原图拟合最小椭圆mat = windowMat(cv::Range(srcMat.rows * 3, srcMat.rows * 4),cv::Range(srcMat.cols * 1, srcMat.cols * 2));cv::addWeighted(mat, 0.0f, fittingEllipseMat, 1.0f, 0.0f, mat);// 效果图copy:原图拟合多边形mat = windowMat(cv::Range(srcMat.rows * 3, srcMat.rows * 4),cv::Range(srcMat.cols * 2, srcMat.cols * 3));cv::addWeighted(mat, 0.0f, fittingPolyMat, 1.0f, 0.0f, mat);}}// 更新cvui::update();// 显示cv::imshow(windowName, windowMat);// esc键退出if(cv::waitKey(25) == 27){break;}}}
工程模板:对应版本号v1.50.0
对应版本号v1.50.0
上一篇:《OpenCV开发笔记(五十五):红胖子8分钟带你深入了解Haar、LBP特征以及级联分类器识别过程(图文并茂+浅显易懂+程序源码)》
下一篇:《OpenCV开发笔记(五十七):红胖子8分钟带你深入了解直方图反向投影(图文并茂+浅显易懂+程序源码)》
原博主博客地址:https://blog.csdn.net/qq21497936
原博主博客导航:https://blog.csdn.net/qq21497936/article/details/102478062
本文章博客地址:https://blog.csdn.net/qq21497936/article/details/106180872
OpenCV开发笔记(五十六):红胖子8分钟带你深入了解多种图形拟合逼近轮廓(图文并茂+浅显易懂+程序源码)的更多相关文章
- OpenCV开发笔记(六十九):红胖子8分钟带你使用传统方法识别已知物体(图文并茂+浅显易懂+程序源码)
若该文为原创文章,未经允许不得转载原博主博客地址:https://blog.csdn.net/qq21497936原博主博客导航:https://blog.csdn.net/qq21497936/ar ...
- OpenCV开发笔记(六十五):红胖子8分钟带你深入了解ORB特征点(图文并茂+浅显易懂+程序源码)
若该文为原创文章,未经允许不得转载原博主博客地址:https://blog.csdn.net/qq21497936原博主博客导航:https://blog.csdn.net/qq21497936/ar ...
- OpenCV开发笔记(六十四):红胖子8分钟带你深入了解SURF特征点(图文并茂+浅显易懂+程序源码)
若该文为原创文章,未经允许不得转载原博主博客地址:https://blog.csdn.net/qq21497936原博主博客导航:https://blog.csdn.net/qq21497936/ar ...
- OpenCV开发笔记(五十五):红胖子8分钟带你深入了解Haar、LBP特征以及级联分类器识别过程(图文并茂+浅显易懂+程序源码)
若该文为原创文章,未经允许不得转载原博主博客地址:https://blog.csdn.net/qq21497936原博主博客导航:https://blog.csdn.net/qq21497936/ar ...
- OpenCV开发笔记(七十一):红胖子8分钟带你深入级联分类器训练
前言 红胖子,来也! 做图像处理,经常头痛的是明明分离出来了(非颜色的),分为几块区域,那怎么知道这几块区域到底哪一块是我们需要的,那么这部分就涉及到需要识别了. 识别可以自己写模板匹配.特征 ...
- OpenCV开发笔记(七十二):红胖子8分钟带你使用opencv+dnn+tensorFlow识别物体
前言 级联分类器的效果并不是很好,准确度相对深度学习较低,本章使用opencv通过tensorflow深度学习,检测已有模型的分类. Demo 可以猜测,1其实是人,18序号类是狗 ...
- OpenCV开发笔记(七十三):红胖子8分钟带你使用opencv+dnn+yolov3识别物体
前言 级联分类器的效果并不是很好,准确度相对深度学习较低,上一章节使用了dnn中的tensorflow,本章使用yolov3模型,识别出具体的分类. Demo 320x320,置信度0 ...
- .net开发笔记(十六) 对前部分文章的一些补充和总结
补充有两个: 一个是系列(五)中讲到的事件编程(网址链接),该文提及到了事件编程的几种方式以及容易引起的一些异常,本文补充“多线程事件编程”这一块. 第二个是前三篇博客中提及到的“泵”结构在编程中的应 ...
- 论文阅读笔记五十六:(ExtremeNet)Bottom-up Object Detection by Grouping Extreme and Center Points(CVPR2019)
论文原址:https://arxiv.org/abs/1901.08043 github: https://github.com/xingyizhou/ExtremeNet 摘要 本文利用一个关键点检 ...
随机推荐
- pytorch seq2seq闲聊机器人加入attention机制
attention.py """ 实现attention """ import torch import torch.nn as nn im ...
- python学习06循环
'''while''''''while 布尔表达式:冒号不能省略''''''1+2+3+...+10'''i=1sum1=0while i<=10: sum1+=i i+=1print(sum1 ...
- 防cc攻击利器之Httpgrard
一.httpgrard介绍 HttpGuard是基于openresty,以lua脚本语言开发的防cc攻击软件.而openresty是集成了高性能web服务器Nginx,以及一系列的Nginx模块,这其 ...
- 【已解决】React项目中按需引入ant-design报错TypeError: injectBabelPlugin is not a function
react项目中ant-design按需加载,使用react-app-rewired的时候报错 运行npm start或者yarn start报如下错误: TypeError: injectBabel ...
- 《Arduino实战》——2.4 反应速度计:谁真正拥有最快的反应时间
本节书摘来异步社区<Arduino实战>一书中的第2章,第2.4节,作者:[美]Martin Evans ,Joshua Noble ,Jordan Hochenbaum,更多章节内容可以 ...
- 开发常见错误解决(6)WSE3.0未处理的WebException,未处理的Web异常,基础连接以及关闭...
开发常见错误解决(6)WSE3.0未处理的WebException,未处理的Web异常,基础连接以及关闭. 我们在调试WSE服务端服务的时候会抛出,未处理的Web异常,基础连接以及关闭的异常信息.如图 ...
- POJ2421 Constructing Roads 最小生成树
修路 时限: 2000MS 内存限制: 65536K 提交总数: 31810 接受: 14215 描述 有N个村庄,编号从1到N,您应该修建一些道路,使每两个村庄可以相互连接.我们说两个村庄A ...
- 单源最短路径:Dijkstra算法(堆优化)
前言:趁着对Dijkstra还有点印象,赶快写一篇笔记. 注意:本文章面向已有Dijkstra算法基础的童鞋. 简介 单源最短路径,在我的理解里就是求从一个源点(起点)到其它点的最短路径的长度. 当然 ...
- 学习Vue第三节,事件修饰符stop、prevent、capture、self、once
事件修饰符: .stop 阻止冒泡 .prevent 阻止默认事件 .capture 添加事件侦听器时使用事件捕获模式 .self 只当事件在该元素本身(比如不是子元素)触发时触发回调 .once 事 ...
- bootstrap 怎么制作好看的表格
bootstrap 怎么制作表格 bootstrap 制作表格带有图文形式.主要知识点有以下几点 第一点肯定是写出一个普通的表格,这一点可以去菜鸟复制它的案例.添加tr和td就可以了 在表格放入图片加 ...