A*算法改进——Any-Angle Path Planning的Theta*算法与Lazy Theta*算法
本文是该篇文章的归纳http://aigamedev.com/open/tutorial/lazy-theta-star/#Nash:07 。
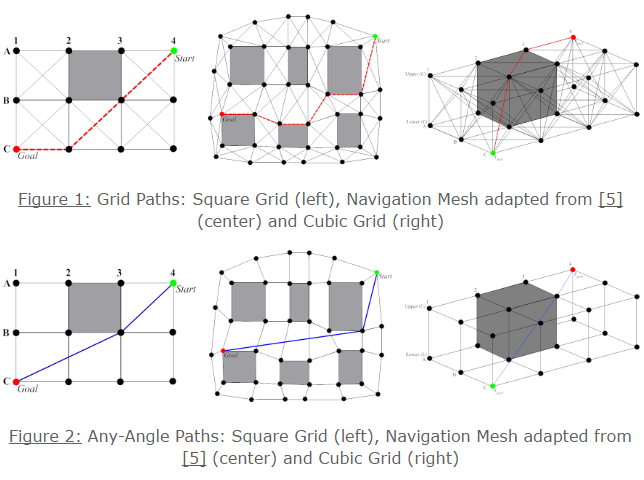
传统的A*算法中,寻找出来的路径只能是沿着给出的模型(比如TileMap、网格模型)上的路径依次行走。(上图上半)
在游戏中寻路的场合下,这种路径看起来是十分不自然的。与之相对的“自然的”寻路称为Any-Angle Path Planning。(上图下半)
对于A*的一个简单的修正是,在生成路径之后,检测路径上隔开的两个点之间是否有line of sight(即视线,以下简称LOS),有的话便可以把中间的点删除,让人物直接穿过。这种方法称之为A* with post-smoothed paths。依据如何选取这两个点,最终优化的效果不同。但是要注意的是这种修正得到的路径的质量和效率是需要取舍的。
另外,本文介绍的算法都不保证寻找的路径是最佳的。不要尝试用来刷题233。
Theta*
修正的第二种办法,即Theta*算法。这种算法是A*的一种改进,关键在于其打开一个节点s,然后更新周围的节点s'时,会检查s'与parent(s)的可见性。如果可见,则把s'的父节点设置成parent(s)。
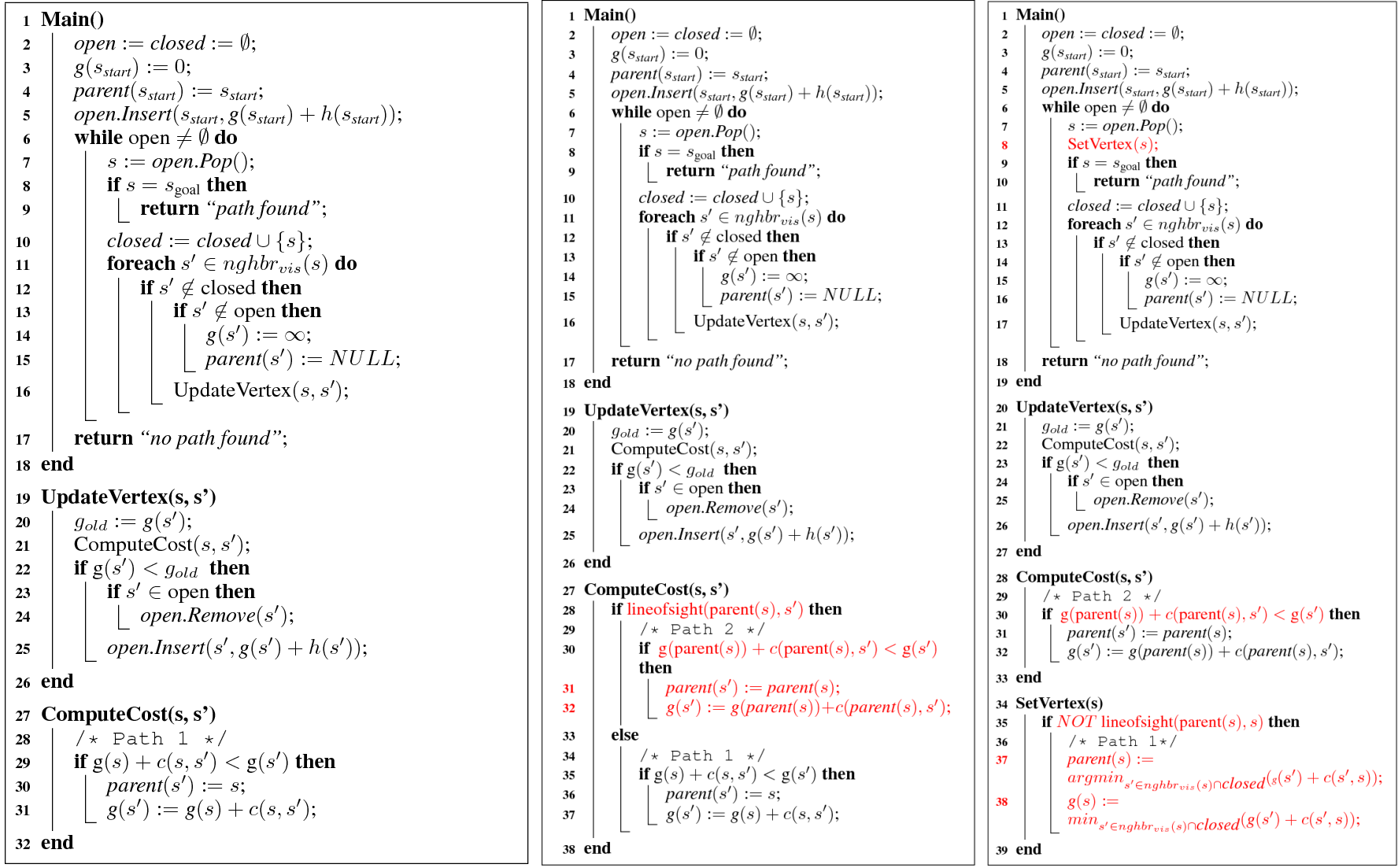
左边是\A*算法,中间是Theta*算法,右边是等下介绍的Lazy Theta*。
可以看到在Theta*中,除了ComputeCost函数之外,其他的内容和A*算法是相同的。
在ComputeCost中,A*算法计算一个点s'的新的g,如果比原来的更好,则将原来的parent和g换成新的。
在Theta*中,则在计算前,先去计算s'和s的parent有无视线。如果有视线,则把s'的parent和g以s的parent为parent进行更新。否则跟A*一样处理。
然而,Theta*有一个很大的问题,就是需要做大量的line of sight检查。有多少个点进入过open列表,就有多少次检查。在较为细致的网格中这个数量是十分巨大的。
Lazy Theta*
这里就引出了Theta*的一种优化,即Lazy Theta*。
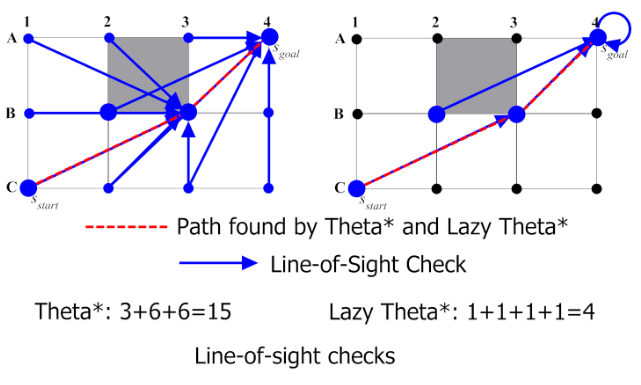
两种算法进行的LOS检查数。
Lazy Theta*的核心思想在于,将line of sight检查延迟到打开该节点为止。
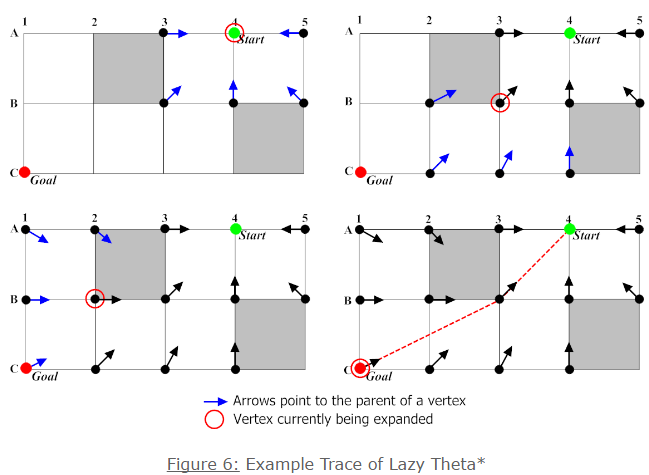
示例,注意右上图(第二步)中B2指向的是start而不是B3,因为B2尚未打开,我们可以乐观认为B2和父节点B3的父节点有LOS。这一假设在左下图(第三步)中,B2打开时才得到修正。
在Theta*中,检查视线的时机发生于一个点进入open列表的时候。但是实际上,有很多进入open列表的点最终不在路径中,这意味着LOS检查是无效的。因此Lazy Theta*选择把LOS检查放到打开该节点的时候进行。
当然,进入open列表的点,我们需要设置它的g值和parent。在Lazy Theta*中,我们乐观地认为在这里LOS检查永远成立的,因此g值和parent值得的设置按照Theta*中LOS检查成立一般地进行设置。
随后,在打开一个节点时,我们对这个点调用SetVertex方法。该方法中我们对该点和它的父节点进行真正的LOS检查。如果成立,那么我们之前的假设是对的,那就继续进行下去。如果没有LOS,那么我们还需要为这个点找到一个正确的parent。
对点s找到正确的parent的方法稍微繁杂一点。首先我们要知道什么点能成为s的parent,答案是在close表里的点。其次还应该是和s有LOS关系的点。如果有的选择的话,我们还要选择g(parent) + c(parent,s)最小的。
当然,如果我们对close表里的点全部做一遍LOS检查那就是本末倒置了。在这里我们直接取s的相邻点作为parent的候选。然后和close表做个交集,在其中选择最好的点即可。
Lazy Theta*的优化
这个优化是在A*中就存在的,优化的A*叫做Weighted A*,即带权重的A*。
所谓权重是加给启发函数的。原本的估值函数F(s) = G(s) + H(s),加入权重后变成F(s) = G(s) + weight * H(s) 。
这意味着比起从出发点到当前点的距离,当前点到终点的距离的估值影响更大(当weight > 1时)。
可以简单的理解为weight越大,会“更想接近终点”。
在Lazy Theta*中也可以直接套用这个优化。同时比起普通的weighted A*,Lazy Theta*中的这项优化更加有价值。具体的就不在这里叙述了,在原文中有提到。
下一篇文章中我会简单叙述一下我在unity/C#中实现的Lazy Theta*寻路。
A*算法改进——Any-Angle Path Planning的Theta*算法与Lazy Theta*算法的更多相关文章
- Design and Implementation of Global Path Planning System for Unmanned Surface Vehicle among Multiple Task Points
Design and Implementation of Global Path Planning System for Unmanned Surface Vehicle among Multiple ...
- 算法:Astar寻路算法改进,双向A*寻路算法
早前写了一篇关于A*算法的文章:<算法:Astar寻路算法改进> 最近在写个js的UI框架,顺便实现了一个js版本的A*算法,与之前不同的是,该A*算法是个双向A*. 双向A*有什么好处呢 ...
- BP神经网络算法改进
周志华机器学习BP改进 试设计一个算法,能通过动态调整学习率显著提升收敛速度,编程实现该算法,并选择两个UCI数据集与标准的BP算法进行实验比较. 1.方法设计 传统的BP算法改进主要有两类: - 启 ...
- 【强化学习】DQN 算法改进
DQN 算法改进 (一)Dueling DQN Dueling DQN 是一种基于 DQN 的改进算法.主要突破点:利用模型结构将值函数表示成更加细致的形式,这使得模型能够拥有更好的表现.下面给出公式 ...
- Behavior Trees for Path Planning (Autonomous Driving)
Behavior Trees for Path Planning (Autonomous Driving) 2019-11-13 08:16:52 Path planning in self-driv ...
- Grassfire算法- 运动规划(Motion planning)
Grassfire算法: 一.概念 这个算法是做图像处理的抽骨架处理,目的是求出图像的骨架,可以想象一片与物体形状相同的草,沿其外围各点同时点火.当火势向内蔓延,向前推进的火线相遇处各点的轨迹就是中 ...
- 【Machine Learning in Action --2】K-近邻算法改进约会网站的配对效果
摘自:<机器学习实战>,用python编写的(需要matplotlib和numpy库) 海伦一直使用在线约会网站寻找合适自己的约会对象.尽管约会网站会推荐不同的人选,但她没有从中找到喜欢的 ...
- 算法(第4版)-1.5 案例研究:union-find算法
问题→ 动态连通性:当程序从输入中读取了整数对p q时,如果已知的所有整数对都不能说明p和q是相连的,那么则将这一对整数写入到输出中.如果已知的数据可以说明p和q 是相连的,那么程序应该忽略p q这对 ...
- Intel发布神经网络压缩库Distiller:快速利用前沿算法压缩PyTorch模型——AttributeError: module ‘tensorboard' has no attribute 'lazy'
转载自:CSDN Nine-days 近日,Intel 开源了一个用于神经网络压缩的开源 Python 软件包 Distiller,它可以减少深度神经网络的内存占用.加快推断速度及节省能耗.Dis ...
随机推荐
- 关于OBS获取显示器黑屏的解决办法
近来看到许多人说OBS获取显示器源的时候黑屏,下面介绍下相关处理办法. 第一种,先尝试把OBS程序的兼容性设置成Win 7和管理员身份,具体操作: 设置成这样,如果能够获取到显示器,那么问题解决,否则 ...
- 1093. Count PAT’s (25)-统计字符串中PAT出现的个数
如题,统计PAT出现的个数,注意PAT不一定要相邻,看题目给的例子就知道了. num1代表目前为止P出现的个数,num12代表目前为止PA出现的个数,num123代表目前为止PAT出现的个数. 遇到P ...
- beta NO1
031602111 傅海涛 1.今天进展 笔记颜色统一,解决笔记的同步性和完整性 2.存在问题 office文档转换的时间问题 3.明天安排 增加新功能和完善之前的功能 4.心得体会 接口真难 031 ...
- Oracle client 使用 .net程序连接 数据库时 出现 8.1.7 的解决办法
1. GS产品 连接oracle数据库时出现错误图示 2. 其实解决这个问题的办法很简单 一般是 修改一下 Oracle的app 目录的权限 最简单的办法是增加 everyone 权限 然后重启机器即 ...
- Jquery Cookie操作
// 写入 $.cookie('the_cookie','the_value');// 读取 $.cookie('the_cookie');// 删除 $.cookie('the_cookie',nu ...
- 苹果手机input框上方有一条阴影线以及input框的placeholder颜色的设置
今天做手机端的时候,用到input框来输入手机号码,但是在安卓手机上input的效果是正常的,在苹果手机上,input的上边框会变粗,有阴影 因为苹果手机的默认给input加上了阴影 给input加入 ...
- 模拟事件【JavaScript高级程序设计第三版】
事件,就是网页中某个特别值得关注的瞬间.事件经常由用户操作或通过其他浏览器功能来触发.但很少有人知道,也可以使用JavaScript 在任意时刻来触发特定的事件,而此时的事件就如同浏览器创建的事件一样 ...
- CUDA ---- device管理
device管理 NVIDIA提供了集中凡是来查询和管理GPU device,掌握GPU信息查询很重要,因为这可以帮助你设置kernel的执行配置. 本博文将主要介绍下面两方面内容: CUDA run ...
- mybatis 传递参数的两种方式与模糊匹配 很重要
- java的类属性默认有this 但容易与参数重名 所以需要显性的加上this 以分区别