2D空间的OBB碰撞实现
OBB全称Oriented bounding box,方向包围盒算法。其表现效果和Unity的BoxCollider并无二致。由于3D空间的OBB需要多考虑一些情况
这里仅关注2D空间下的OBB。
实现效果:

网上有许多OBB的讲解,其具体步骤也未必一样,我是这么做的
在两个凸多边形中找到一根轴,凸多边形所有在这根轴上的投影点不产生相交,则这两个凸多边形不相交。
这根轴一般取每个边的垂线,逐个投影进行测试。
这里先上一个BOX的版本,如下图:
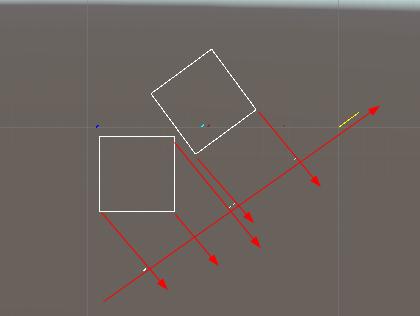
可以看见在右侧方块的投影轴上,得到了非相交结果
Box版本代码如下:
using UnityEngine; public class OBB : MonoBehaviour
{
public bool enableDebug;
public int debug_axisIndex;
int mDebugInternalAxisIndex; public Vector2 size; public Color gizmosColor = Color.white; Vector2 P0 { get { return transform.localToWorldMatrix.MultiplyPoint3x4(-size * 0.5f); } }
Vector2 P1 { get { return transform.localToWorldMatrix.MultiplyPoint3x4(new Vector3(size.x * 0.5f, -size.y * 0.5f, )); } }
Vector2 P2 { get { return transform.localToWorldMatrix.MultiplyPoint3x4(size * 0.5f); } }
Vector2 P3 { get { return transform.localToWorldMatrix.MultiplyPoint3x4(new Vector3(-size.x * 0.5f, size.y * 0.5f, )); } } public bool Intersects(OBB other)
{
var axis1 = (P1 - P0).normalized;
var axis2 = (P3 - P0).normalized; var axis3 = (other.P1 - other.P0).normalized;
var axis4 = (other.P3 - other.P0).normalized; mDebugInternalAxisIndex = ; var isNotIntersect = false;
isNotIntersect |= ProjectionIsNotIntersect(this, other, axis1);
isNotIntersect |= ProjectionIsNotIntersect(this, other, axis2);
isNotIntersect |= ProjectionIsNotIntersect(this, other, axis3);
isNotIntersect |= ProjectionIsNotIntersect(this, other, axis4); return isNotIntersect ? false : true;
} bool ProjectionIsNotIntersect(OBB x, OBB y, Vector2 axis)
{
var x_p0 = Vector3.Project(x.P0, axis).magnitude * Mathf.Sign(Vector3.Dot(Vector3.Project(x.P0, axis), axis));
var x_p1 = Vector3.Project(x.P1, axis).magnitude * Mathf.Sign(Vector3.Dot(Vector3.Project(x.P1, axis), axis));
var x_p2 = Vector3.Project(x.P2, axis).magnitude * Mathf.Sign(Vector3.Dot(Vector3.Project(x.P2, axis), axis));
var x_p3 = Vector3.Project(x.P3, axis).magnitude * Mathf.Sign(Vector3.Dot(Vector3.Project(x.P3, axis), axis)); var y_p0 = Vector3.Project(y.P0, axis).magnitude * Mathf.Sign(Vector3.Dot(Vector3.Project(y.P0, axis), axis));
var y_p1 = Vector3.Project(y.P1, axis).magnitude * Mathf.Sign(Vector3.Dot(Vector3.Project(y.P1, axis), axis));
var y_p2 = Vector3.Project(y.P2, axis).magnitude * Mathf.Sign(Vector3.Dot(Vector3.Project(y.P2, axis), axis));
var y_p3 = Vector3.Project(y.P3, axis).magnitude * Mathf.Sign(Vector3.Dot(Vector3.Project(y.P3, axis), axis)); var xMin = Mathf.Min(x_p0, x_p1, x_p2, x_p3);
var xMax = Mathf.Max(x_p0, x_p1, x_p2, x_p3);
var yMin = Mathf.Min(y_p0, y_p1, y_p2, y_p3);
var yMax = Mathf.Max(y_p0, y_p1, y_p2, y_p3); if (enableDebug)
{
if (debug_axisIndex == mDebugInternalAxisIndex)
{
Debug.DrawRay(Vector3.Project(x.P0, axis), Vector3.one * 0.1f);
Debug.DrawRay(Vector3.Project(x.P2, axis), Vector3.one * 0.1f); Debug.DrawRay(Vector3.Project(y.P0, axis), Vector3.one * 0.1f, Color.white * 0.9f);
Debug.DrawRay(Vector3.Project(y.P2, axis), Vector3.one * 0.1f, Color.white * 0.9f); Debug.DrawRay(Vector3.zero, Vector3.one * 0.1f, Color.black);
Debug.DrawRay(Vector3.zero, axis, Color.yellow);
Debug.DrawRay(xMin * Vector3.right, Vector3.one * 0.1f, Color.blue);
Debug.DrawRay(xMax * Vector3.right, Vector3.one * 0.1f, Color.cyan);
Debug.DrawRay(yMin * Vector3.right, Vector3.one * 0.1f, Color.red * 0.5f);
Debug.DrawRay(yMax * Vector3.right, Vector3.one * 0.1f, Color.red * 0.5f); Debug.Log("(yMin >= xMin && yMin <= xMax): " + (yMin >= xMin && yMin <= xMax) + " frame count: " + Time.frameCount);
Debug.Log("(yMax >= xMin && yMax <= xMax): " + (yMax >= xMin && yMax <= xMax) + " frame count: " + Time.frameCount);
Debug.Log("(xMin >= yMin && xMin <= yMax): " + (xMin >= yMin && xMin <= yMax) + " frame count: " + Time.frameCount);
Debug.Log("(xMax >= yMin && xMax <= yMax): " + (xMax >= yMin && xMax <= yMax) + " frame count: " + Time.frameCount);
}
mDebugInternalAxisIndex++;
} if (yMin >= xMin && yMin <= xMax) return false;
if (yMax >= xMin && yMax <= xMax) return false;
if (xMin >= yMin && xMin <= yMax) return false;
if (xMax >= yMin && xMax <= yMax) return false; return true;
} void OnDrawGizmos()
{
var cacheMatrix = Gizmos.matrix;
var cacheColor = Gizmos.color; Gizmos.matrix = transform.localToWorldMatrix; Gizmos.color = gizmosColor;
Gizmos.DrawWireCube(Vector3.zero, new Vector3(size.x, size.y, 1f)); Gizmos.color = cacheColor;
Gizmos.matrix = cacheMatrix;
}
}
Obb.cs
using System.Collections;
using System.Collections.Generic;
using UnityEngine; public class Test : MonoBehaviour
{
public OBB a;
public OBB b; void Update()
{
var isIntersects = a.Intersects(b);
if (isIntersects)
{
a.gizmosColor = Color.red;
b.gizmosColor = Color.red;
}
else
{
a.gizmosColor = Color.white;
b.gizmosColor = Color.white;
}
}
}
Test.cs
增加了一个debug开关,可以单独查看每个轴的映射信息。
那么下面是凸多边形的版本,垂线通过叉乘获取:
脚本如下:
using System.Collections;
using System.Collections.Generic;
using UnityEngine; public class OBB : MonoBehaviour
{
public Vector2[] points = new Vector2[];
public int debug_Index;
int mDebug_Index;
public Color gizmosColor = Color.white; public bool Intersects(OBB other)
{
var isNotIntersect = false; mDebug_Index = ;
for (int i = ; i <= points.Length; i++)
{
var p0 = transform.localToWorldMatrix.MultiplyPoint3x4(points[i - ]);
var p1 = transform.localToWorldMatrix.MultiplyPoint3x4(points[i % points.Length]); var axis = Vector3.Cross((p1 - p0), Vector3.forward).normalized;
isNotIntersect |= ProjectionIsNotIntersect(this, other, axis); mDebug_Index++;
} return isNotIntersect ? false : true;
} bool ProjectionIsNotIntersect(OBB x, OBB y, Vector2 axis)
{
float xMin, xMax, yMin, yMax;
GetMinMax(x.transform.localToWorldMatrix, x.points, axis, out xMin, out xMax);
GetMinMax(y.transform.localToWorldMatrix, y.points, axis, out yMin, out yMax); if (yMin >= xMin && yMin <= xMax) return false;
if (yMax >= xMin && yMax <= xMax) return false;
if (xMin >= yMin && xMin <= yMax) return false;
if (xMax >= yMin && xMax <= yMax) return false; return true;
} void GetMinMax(Matrix4x4 matrix, Vector2[] points, Vector2 projectAxis, out float min, out float max)
{
min = float.MaxValue;
max = float.MinValue; for (int i = ; i < points.Length; i++)
{
var p = matrix.MultiplyPoint3x4(points[i]); var projectValue = Vector3.Project(p, projectAxis).magnitude * Mathf.Sign(Vector3.Dot(Vector3.Project(p, projectAxis), projectAxis)); if (projectValue > max)
max = projectValue;
} for (int i = ; i < points.Length; i++)
{
var p = matrix.MultiplyPoint3x4(points[i]); var projectValue = Vector3.Project(p, projectAxis).magnitude * Mathf.Sign(Vector3.Dot(Vector3.Project(p, projectAxis), projectAxis)); if (projectValue < min)
min = projectValue;
}
} void OnDrawGizmos()
{
var cacheColor = Gizmos.color; Gizmos.color = gizmosColor; for (int i = ; i <= points.Length; i++)
{
var p0 = transform.localToWorldMatrix.MultiplyPoint3x4(points[i - ]);
var p1 = transform.localToWorldMatrix.MultiplyPoint3x4(points[i % points.Length]); Gizmos.DrawLine(p0, p1);
} Gizmos.color = cacheColor;
}
}
OBB.cs
到这里就结束了,如果是一个具体形状和点进行比较方法其实是非常多的,而类似这样的凸包之间进行相交测试OBB倒是一个蛮实用的办法。
2D空间的OBB碰撞实现的更多相关文章
- 游戏中的2D OBB碰撞模型的碰撞算法介绍和实践
前言 上一篇博文说道,射线与场景中模型上的所有三角形求交时,会大幅度影响效率且花费比较多的时间,因此会采取使用包围盒的形式,进行一个加速求交.在此文中介绍OBB碰撞模型的碰撞算法 OBB的碰撞模型 有 ...
- [译]2D空间中使用四叉树Quadtree进行碰撞检测优化
操作系统:Windows8.1 显卡:Nivida GTX965M 开发工具:Unity2017.2.0f3 原文出处 : Quick Tip: Use Quadtrees to Detect Lik ...
- 2D空间中判断一点是否在三角形内
要注意如果是XY坐标轴的2D空间,要取差乘分量z而不是y. 实现原理是,将三角形ABC三个边(AB,BC,CA)分别与比较点判断差乘,如果这3个差乘结果表示的方向一致,说明就在三角形内. 效果: 代码 ...
- 2D空间中求一点是否在多边形内
参考自这篇博文:http://www.cnblogs.com/dabiaoge/p/4491540.html 一开始没仔细看做法,浪费了不少时间.下面是最终实现的效果: 大致流程: 1.随便选取多边形 ...
- Cocos2d-x教程(34)-三维物体OBB碰撞检測算法
欢迎增加Cocos2d-x 交流群:193411763 个中心点.1个旋转矩阵和3个1/2边长(注:一个旋转矩阵包括了三个旋转轴,若是二维的OBB包围盒则是一个中心点,两个旋转轴,两个1/2边长). ...
- 复数基础及其2D空间的旋转
本文我们讨论复数及其旋转的含义.复数很有意思,本文介绍了复数的基本定义和性质,以及它关于旋转的几何意义. 复数对于旋转的两个方面极为重要: 1. 它引入了旋转算子(rotational operato ...
- OBB碰撞
OBB碰撞检测,坐标点逆时针 class OBBTest extends egret.DisplayObjectContainer { private obb1:OBB; private obb2:O ...
- 2D空间中求两圆的交点
出处:https://stackoverflow.com/questions/19916880/sphere-sphere-intersection-c-3d-coordinates-of-colli ...
- 2D空间中求线段与圆的交点
出处: https://answers.unity.com/questions/366802/get-intersection-of-a-line-and-a-circle.html 测试脚本(返回值 ...
随机推荐
- 对Promise的一些深入了解
1.介绍promise和模仿Promise.all和Promise.race promise的设计主要是解决回调地狱(接收结果用回调函数来处理,但必须传入回调函数)的问题,由一层层嵌套回调函数改为由t ...
- Django 学习第五天——自定义过滤器及标签
代码布局:(自定义的代码放在哪?) 1.创建某个 app 特有的: 在 app 目录下,创建 templatetags python包(文件夹): 再到 templatetags 文件夹下创建pyth ...
- F5-VM
如果找不到的话,点击下面的链接.链接包含物理主机镜像和虚机主机镜像,选择virtual Edition. BIG-IP v11.x / Virtual Edition https://download ...
- GCD 与 LCM UVA - 11388
题目链接: https://cn.vjudge.net/problem/23709/origin 本题其实有坑 数据大小太大, 2的32次方,故而一定是取巧的算法,暴力不可能过的 思路是最大公因数的倍 ...
- 一道有意思的找规律题目 --- CodeForces - 964A
题目连接: https://vjudge.net/problem/1502082/origin 这一题第一眼看过去貌似是模拟,但是根据其范围是1e9可以知道,如果暴力解基本上是不可能的(不排除大佬级优 ...
- 全球第一款纯数据GPRS模块 有方M590 概述
更多精彩请到http://blog.tuzhuke.info/?cat=30 M590为全球第一款纯数据GPRS模块,专注数据收发功能,GPRS数据以及短信数据.没有电话语音功能,可以能够拨打或者接听 ...
- 秘密袭击 [BZOJ5250] [树形DP]
分析: 听说正解是FFT+线段树合并,然而我并不会... 我们来思考其他的方法. 我们要求的是连通块第k大的和 对于某一个连通块,对答案的贡献=val(Rank.K) 我们不好直接算出每个连通块的Ra ...
- 回文检测 [USACO Training Section 1.3]
题目描述 据说如果你给无限只母牛和无限台巨型便携式电脑(有非常大的键盘),那么母牛们会制造出世上最棒的回文.你的工作就是去寻找这些牛制造的奇观(最棒的回文). 在寻找回文时不用理睬那些标点符号.空格( ...
- c++ 引用犯的一个错
void cal(int * &a) { ................ } int main() { int x=1; int *p=x; cal( &x );//出错 cal( ...
- 关于numpy
摘要:关于numpy and pandas的使用很多,最近也老用到,但是作为初学者总是模模糊糊,使用不清楚,所以就好好总结了一下,以备后用 第一部分:numpy 1.基础属性 import numpy ...