机器人自主移动的秘密:SLAM与路径规划有什么关系?(三)
博客转载自:https://www.leiphone.com/news/201612/lvDXqY82OGNqEiyl.html
雷锋网(公众号:雷锋网)按:本文作者SLAMTEC(思岚科技公号slamtec-sh)技术顾问,专注SLAM及相关传感器研发应用。
我们先来看看SLAM与路径规划的关系
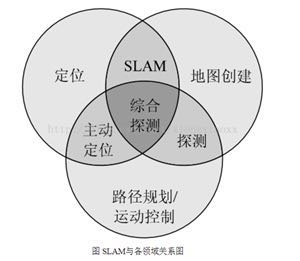
实际上,SLAM算法本身只是完成了机器人的定位和地图构建两件事情,与我们说的导航定位并不是完全等价的。这里的导航,其实是SLAM算法做不了的。它在业内叫做运动规划(Motion Planning)。
运动规划是一个很大的概念,从机械臂的运动、到飞行器的飞行,再到这里我们说的扫地机的清扫路径规划,都是运动规划的范畴。
我们先谈谈针对扫地机这类轮式机器人的运动规划。这里所需的基础能力就是路径规划,也就是一般在完成SLAM后,要进行一个叫做目标点导航的能力。通俗的说,就是规划一条从A点到B点的路径出来,然后让机器人移动过去。
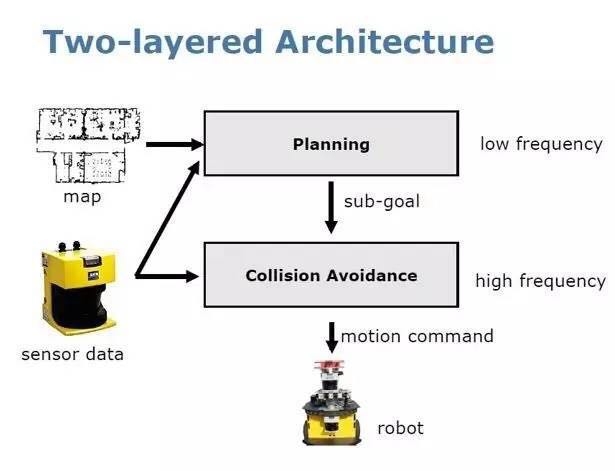
要实现这个过程,运动规划要实现至少两个层次的模块,一个叫做全局规划,这个和我们车载导航仪有一点像,它需要在地图上预先规划一条线路,也要有当前机器人的位置。这是由我们的SLAM系统提供出来的。行业内一般会用叫做A*的算法来实现这个过程,它是一种启发式的搜索算法,非常优秀。它最多的应用是在游戏中,比如像星际争霸、魔兽争霸之类的即时战略游戏,都是使用这个算法来计算单位的运动轨迹的。
当然,仅仅规划了路径还是不够的,现实中会有很多突发情况,比如正巧有个小孩子挡道了,就需要调整原先的路径。当然,有时候这种调整并不需要重新计算一遍全局路径,机器人可能稍微绕一个弯就可以。此时,我们就需要另一个层次的规划模块,叫做局部规划。它可能并不知道机器人最终要去哪,但是对于机器人怎么绕开眼前的障碍物特别在行。
视频请查看源博客
这两个层次的规划模块协同工作,机器人就可以很好的实现从A点到B点的行动了,不过实际工作环境下,上述配置还不够。比如A*算法规划的路径是根据已知地图,预先规划好的,一旦机器人前往目的地的过程中遇到了新的障碍物,就只好完全停下来,等待障碍物离开或者重新规划路径了。如果扫地机器人买回家,必须先把屋子都走一遍以后才肯扫地,那用户体验就会很差。
为此,也会有针对这类算法的改进,比如SLAMWARE内我们采用改良的D*算法进行路径规划,这也是美国火星探测器采用的核心寻路算法。这是一种动态启发式路径搜索算法,它让机器人在陌生环境中行动自如,在瞬息万变的环境中游刃有余。
D*算法的最大优点是不需要预先探明地图,机器人可以和人一样,即使在未知环境中,也可以展开行动,随着机器人不断探索,路径也会时刻调整。
视频请查看源博客
以上是目前大部分移动机器人都需要的路径规划算法,而扫地机器人作为最早出现在消费市场的服务机器人之一,它需要的路径规划算法更为复杂。
一般来说,扫地机需要这么几个规划能力:贴边打扫、折返的工字形清扫以及没电时候自主充电。单单依靠前面介绍的D*这类算法,无法满足这些基础需要。
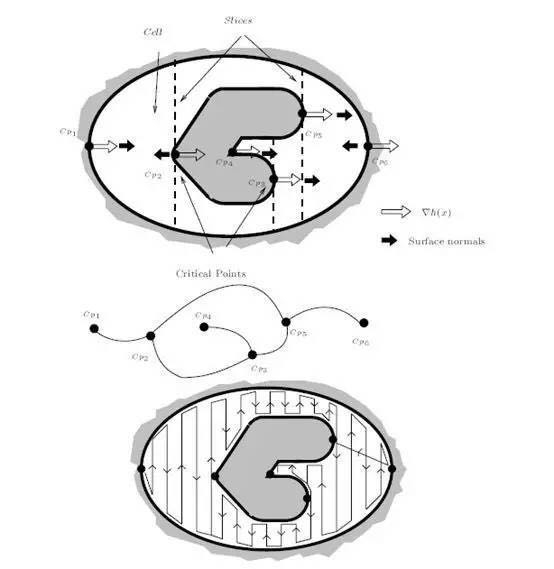
扫地机器人还需要有额外的规划算法,比如针对折返的工字形清扫,有很多问题要处理。扫地机如何最有效进行清扫而不重复清扫?如何让扫地机和人一样,理解房间、门、走廊这种概念?
针对这些问题,学术界长久以来有一个专门的研究课题,叫做空间覆盖(space coverage),同时也提出了非常多的算法和理论。其中,比较有名的是Morse Decompositions,扫地机通过它实现对空间进行划分,随后进行清扫。
20世纪70年代,卡内基梅隆大学(CMU)完全依靠超声波做到了现在我们扫地机的行为,当然造价也十分昂贵。
前面介绍的从A点到B点移动路径规划也是实现这类更高级路径规划的基础。实际上,要从SLAM实现到扫地机器人所需要的这些功能,还是有非常多的工作要做的。针对扫地机器人,我们将其特有的路径规划功能预先内置在SLAMWARE中,方便厂家进行整合,不需要进行二次开发。
本文转自雷锋网,如需转载请至雷锋网官网申请授权。
机器人自主移动的秘密:SLAM与路径规划有什么关系?(三)的更多相关文章
- 机器人自主移动的秘密,从SLAM技术说起(一)
博客转载自:https://www.leiphone.com/news/201609/c35bn1M9kgVaCCef.html 雷锋网(公众号:雷锋网)按:本文作者SLAMTEC(思岚科技公号sla ...
- 机器人自主移动的秘密:实际应用中,SLAM究竟是如何实现的?(二)
博客转载自:https://www.leiphone.com/news/201612/FRzmoEI8Iud6CmT2.html 雷锋网(公众号:雷锋网)按:本文作者SLAMTEC(思岚科技公号sla ...
- 学习移动机器人SLAM、路径规划必看的几本书
作者:小白学移动机器人链接:https://zhuanlan.zhihu.com/p/168027225来源:知乎著作权归作者所有.商业转载请联系作者获得授权,非商业转载请注明出处. 声明:推荐正版图 ...
- 除了ROS ,机器人自主定位导航还能怎么做?
博客转载自:https://www.leiphone.com/news/201609/10QD7yp7JFV9H9Ni.html 雷锋网(公众号:雷锋网)按:本文作者科技剪刀手,思岚科技技术顾问. 随 ...
- 机器人路径规划其一 Dijkstra Algorithm【附动态图源码】
首先要说明的是,机器人路径规划与轨迹规划属于两个不同的概念,一般而言,轨迹规划针对的对象为机器人末端坐标系或者某个关节的位置速度加速度在时域的规划,常用的方法为多项式样条插值,梯形轨迹等等,而路径规划 ...
- 机器人路径规划其二 A-Star Algorithm【附动态图源码】
首先要说明的是,机器人路径规划与轨迹规划属于两个不同的概念,一般而言,轨迹规划针对的对象为机器人末端坐标系或者某个关节的位置速度加速度在时域的规划,常用的方法为多项式样条插值,梯形轨迹等等,而路径规划 ...
- 【2018.04.19 ROS机器人操作系统】机器人控制:运动规划、路径规划及轨迹规划简介之一
参考资料及致谢 本文的绝大部分内容转载自以下几篇文章,首先向原作者致谢,希望自己能在这些前辈们的基础上能有所总结提升. 1. 运动规划/路径规划/轨迹规划的联系与区别 https://blog.csd ...
- V-rep学习笔记:机器人路径规划2
路径规划问题是机器人学研究的一个重要领域,它是指给定操作环境以及起始和目标的位置姿态,要求选择一条从起始点到目标点的路径,使运动物体(移动机器人或机械臂)能安全.无碰撞地通过所有的障碍物而达到目标位置 ...
- V-rep学习笔记:机器人路径规划1
Motion Planning Library V-REP 从3.3.0开始,使用运动规划库OMPL作为插件,通过调用API的方式代替以前的方法进行运动规划(The old path/motion ...
随机推荐
- LeetCode OJ:Path Sum(路径之和)
Given a binary tree and a sum, determine if the tree has a root-to-leaf path such that adding up all ...
- 面试题46:求1+2+...+n
题目:求1+2+...+n,要求不能使用乘除法.for.while.if.else.swithc.case等关键字及条件判断语句(A?B:C). 解法一:利用构造函数求解 class Temp { p ...
- UVALive 3635 Pie(二分法)
简单的二分法应用,循环1000次精度就满足要求了. #include<iostream> #include<cstdio> #include<cstdlib> #i ...
- len(),range()函数
len()函数返回字符串.列表.字典.元组等长度 eg1:计算字符串的长度: >>>s='hello good boy doiido' >>>len(s) > ...
- 利用HTML5开发Android笔记(中篇)
资源来自于www.mhtml5.com 杨丰盛老师成都场的PPT分享 一个很简明的demo 可以作为入门基础 学习的过程中做了点笔记 整理如下 虽然内容比较简单 但是数量还是比较多的 所以分了3篇 ( ...
- dbca 快速健建库
[oracle@e0946877f272 ~]$ dbca -silent -createDatabase -templateName $ORACLE_HOME/assistants/dbca/tem ...
- BZOJ2276:[POI2011]Temperature
浅谈队列:https://www.cnblogs.com/AKMer/p/10314965.html 题目传送门:https://lydsy.com/JudgeOnline/problem.php?i ...
- django1.7+nginx1.4.4的static配置
静态文件指像css,js,images之类的文件. 1.工程配置setting.py STATIC_URL = /static/ STATIC_ROOT = /home/www/winingcpi/s ...
- FLASH和EEROM使用【转】
最近在看代码的时候,遇到了一个使用FLASH模拟EEPROM的情况,看到这个我当时是一脸蒙蔽啊,对于一个有时候连FLASH和EEPROM都分不清的人来说,怎么可能读懂用FLASH来模拟EEPROM呢? ...
- Spring学习八
1: Tomcat容器四个等级? Container, Engine, Servlet容器, Context 真正管理Servlet的容器是Context容器:一个context对应一个web工程. ...