c++实现kd树
#ifndef _KD_TREE_H_
#define _KD_TREE_H_ #include <memory>
#include <vector>
#include <algorithm>
#include <iostream>
#include <functional>
#include <iomanip>
#include <stack>
#include <array>
#include <cfloat>
#include <cmath> namespace zstd
{
struct threeD_node
{
double value[];//value[0] = x, value[1] = y, value[2] = z
threeD_node()
{
value[] = 0.0;
value[] = 0.0;
value[] = 0.0;
}
threeD_node(double x, double y, double z)
{
value[] = x;
value[] = y;
value[] = z;
}
};
struct sort_for_threeD_node
{
int dimension;
sort_for_threeD_node(int d) :dimension(d){}
bool operator ()(const threeD_node& lhs, const threeD_node& rhs)
{
if (dimension == )
return lhs.value[] < rhs.value[];
else if (dimension == )
return lhs.value[] < rhs.value[];
else if (dimension == )
return lhs.value[] < rhs.value[];
else
std::cerr << "error in sort_for_threeD_node"<< std::endl;
return false;
}
}; struct kd_node
{
double value[];//value[0] = x, value[1] = y, value[2] = z
int kv;//0=x, 1=y, 2=z
bool is_leaf;
kd_node *left, *right;
kd_node()
{
value[] = value[] = value[] = 0.0;
kv = -;
is_leaf = false;
left = nullptr;
right = nullptr;
}
kd_node(const kd_node& node)
{
value[] = node.value[];
value[] = node.value[];
value[] = node.value[];
kv = node.kv;
is_leaf = node.is_leaf;
left = node.left;
right = node.right;
}
kd_node& operator = (const kd_node& node)
{
value[] = node.value[];
value[] = node.value[];
value[] = node.value[];
kv = node.kv;
is_leaf = node.is_leaf;
left = node.left;
right = node.right; return *this;
}
};
class kd_tree
{
private:
std::shared_ptr<kd_node> root;
std::vector<threeD_node>& vec_ref;
const int k = ;
const int cspace = ;
private:
int get_dimension(int n) const
{
return n % k;
}
void sort_by_dimension(std::vector<threeD_node>& v, int dimension, int l, int r);
kd_node* build_tree(int left, int right, kd_node* sp_node, int dimension);
void _print_tree(kd_node* sp, bool left, int space); double distance(const kd_node& lhs, const threeD_node& rhs);
public:
explicit kd_tree(std::vector<threeD_node>&);
kd_tree(const kd_tree&) = delete;
kd_tree operator = (const kd_tree&) = delete;
~kd_tree(){}; void print_tree();
std::vector<threeD_node> find_k_nearest(int k, const threeD_node& D);
};
void kd_tree::sort_by_dimension(std::vector<threeD_node>& v, int dimension, int l, int r)
{
sort_for_threeD_node s(dimension);
std::sort(v.begin()+l, v.begin()+r, s);
}
kd_tree::kd_tree(std::vector<threeD_node>& v) :vec_ref(v)
{
if (vec_ref.empty())
root = nullptr;
else
{
root = std::make_shared<kd_node>();
int dimension = ;
sort_by_dimension(vec_ref, dimension, , vec_ref.size());
int mid = vec_ref.size() / ;
root->value[] = vec_ref[mid].value[];
root->value[] = vec_ref[mid].value[];
root->value[] = vec_ref[mid].value[];
root->kv = dimension;
if (vec_ref.size() == )//root is leaf
{
root->left = nullptr;
root->right = nullptr;
root->is_leaf = true;
}
else
{
root->is_leaf = false;
root->left = build_tree(, mid - , root->left, get_dimension(dimension + ));
root->right = build_tree(mid + , vec_ref.size() - , root->right, get_dimension(dimension + ));
}
}
}
kd_node* kd_tree::build_tree(int left, int right, kd_node* sp_node, int dimension)
{
dimension = get_dimension(dimension);
sort_by_dimension(vec_ref, dimension, left, right + ); if(left == right)//leaf
{
sp_node = new kd_node();
sp_node->value[] = vec_ref[left].value[];
sp_node->value[] = vec_ref[left].value[];
sp_node->value[] = vec_ref[left].value[];
sp_node->kv = dimension;
sp_node->is_leaf = true;
sp_node->left = nullptr;
sp_node->right = nullptr; return sp_node;
}
else if (left < right)
{
int mid = left + (right - left) / ;
sp_node = new kd_node();
sp_node->value[] = vec_ref[mid].value[];
sp_node->value[] = vec_ref[mid].value[];
sp_node->value[] = vec_ref[mid].value[];
sp_node->kv = dimension;
sp_node->is_leaf = false;
sp_node->left = nullptr;
sp_node->right = nullptr; sp_node->left = build_tree(left, mid - , sp_node->left, get_dimension(dimension + ));
sp_node->right = build_tree(mid + , right, sp_node->right, get_dimension(dimension + )); return sp_node;
}
return nullptr;
}
void kd_tree::_print_tree(kd_node* sp, bool left, int space)
{
if (sp != nullptr)
{
_print_tree(sp->right, false, space + cspace);
std::cout << std::setw(space);
std::cout << "(" <<
sp->value[] << ", " <<
sp->value[] << ", " <<
sp->value[] << ")";
if (left)
std::cout << "left";
else
std::cout << "right";
if (sp->is_leaf)
std::cout << "------leaf";
std::cout << std::endl;
_print_tree(sp->left, true, space + cspace);
}
else
std::cout << std::endl;
}
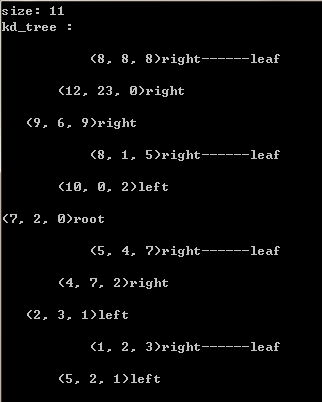
void kd_tree::print_tree()
{
std::cout << "kd_tree : " << std::endl;
if (root != nullptr)
{
int space = ;
_print_tree(root->right, false, space + cspace);
std::cout << "(" <<
root->value[] << ", " <<
root->value[] << ", " <<
root->value[] << ")root" << std::endl;
_print_tree(root->left, true, space + cspace);
}
}
double kd_tree::distance(const kd_node& lhs, const threeD_node& rhs)
{
double v0 = lhs.value[] - rhs.value[];
double v1 = lhs.value[] - rhs.value[];
double v2 = lhs.value[] - rhs.value[];
return sqrt(v0 * v0 + v1 * v1 + v2 * v2);
}
std::vector<threeD_node> kd_tree::find_k_nearest(int ks, const threeD_node& D)
{
std::vector<threeD_node> res;
const kd_node *ptr_kd_node;
if (static_cast<std::size_t>(ks) > vec_ref.size())
return res;
std::stack<kd_node> s;
struct pair
{
double distance;
kd_node node;
pair() :distance(DBL_MAX), node(){ }
bool operator < (const pair& rhs)
{
return distance < rhs.distance;
}
};
std::unique_ptr<pair[]> ptr_pair(new pair[ks]);
//pair *ptr_pair = new pair[ks]();
if (!ptr_pair)
exit(-); if (!root)//the tree is empty
return std::vector<threeD_node>();
else
{
if (D.value[root->kv] < root->value[root->kv])
{
s.push(*root);
ptr_kd_node = root->left;
}
else
{
s.push(*root);
ptr_kd_node = root->right;
}
while (ptr_kd_node != nullptr)
{
if (D.value[ptr_kd_node->kv] < ptr_kd_node->value[ptr_kd_node->kv])
{
s.push(*ptr_kd_node);
ptr_kd_node = ptr_kd_node->left;
}
else
{
s.push(*ptr_kd_node);
ptr_kd_node = ptr_kd_node->right;
}
} while (!s.empty())
{
kd_node popped_kd_node;//±£´æ×îеĴÓÕ»ÖÐpop³öµÄkd_node
popped_kd_node = s.top();
s.pop();
double dist = distance(popped_kd_node, D);
std::sort(&ptr_pair[], &ptr_pair[ks]);
if (dist < ptr_pair[ks-].distance)
{
ptr_pair[ks-].distance = dist;
ptr_pair[ks-].node = popped_kd_node;
} if (abs(D.value[popped_kd_node.kv] - popped_kd_node.value[popped_kd_node.kv])
>= dist)//Ô²²»ºÍpopped_kd_nodeµÄÁíÒ»°ëÇøÓòÏཻ
continue;
else//Ô²ºÍpopped_kd_nodeµÄÁíÒ»°ëÇøÓòÏཻ
{
if (D.value[popped_kd_node.kv] < popped_kd_node.value[popped_kd_node.kv])//right
{
kd_node *ptr = popped_kd_node.right;
while (ptr != nullptr)
{
s.push(*ptr);
if (D.value[ptr->kv] < ptr->value[ptr->kv])
ptr = ptr->left;
else
ptr = ptr->right;
}
}
else//left
{
kd_node *ptr = popped_kd_node.left;
while (ptr != nullptr)
{
s.push(*ptr);
if (D.value[ptr->kv] < ptr->value[ptr->kv])
ptr = ptr->left;
else
ptr = ptr->right;
}
}
}
}//end of while
for(int i = ; i != ks; ++i)
res.push_back(threeD_node(ptr_pair[i].node.value[],
ptr_pair[i].node.value[], ptr_pair[i].node.value[]));
}//end of else
//delete ptr_pair;
return res;
} }//end of namespace zstd #endif
#include <string>
#include <iostream>
#include <new>
#include <fstream>
#include <vector>
#include <algorithm>
#include <ctime> #include "trie_tree.h"
#include "kd_tree.h" int main()
{
std::vector<zstd::threeD_node> v, res;
v.push_back(zstd::threeD_node(, , ));//
v.push_back(zstd::threeD_node(, , ));//
v.push_back(zstd::threeD_node(, , ));//
v.push_back(zstd::threeD_node(, , ));//
v.push_back(zstd::threeD_node(, , ));//
v.push_back(zstd::threeD_node(, , ));//
v.push_back(zstd::threeD_node(, , ));//
v.push_back(zstd::threeD_node(, , ));//
v.push_back(zstd::threeD_node(, , ));//
v.push_back(zstd::threeD_node(, , ));//
v.push_back(zstd::threeD_node(, , ));//
std::cout << "size: " << v.size() << std::endl;
zstd::kd_tree tree(v);
tree.print_tree();
res = tree.find_k_nearest(, zstd::threeD_node(, , ));
std::cout << "-------" << std::endl;
std::cout << "离点(0,0,0)最近的点依次是:" << std::endl;
for (auto i : res)
{
std::cout << "(" << i.value[] << ", " << i.value[] << ", " << i.value[] << ")" << std::endl;
}
system("pause");
return ;
}

c++实现kd树的更多相关文章
- 利用KD树进行异常检测
软件安全课程的一次实验,整理之后发出来共享. 什么是KD树 要说KD树,我们得先说一下什么是KNN算法. KNN是k-NearestNeighbor的简称,原理很简单:当你有一堆已经标注好的数据时,你 ...
- 2016 ICPC青岛站---k题 Finding Hotels(K-D树)
题目链接 http://acm.hdu.edu.cn/showproblem.php?pid=5992 Problem Description There are N hotels all over ...
- kd树和knn算法的c语言实现
基于kd树的knn的实现原理可以参考文末的链接,都是一些好文章. 这里参考了别人的代码.用c语言写的包括kd树的构建与查找k近邻的程序. code: #include<stdio.h> # ...
- PCL点云库:Kd树
Kd树按空间划分生成叶子节点,各个叶子节点里存放点数据,其可以按半径搜索或邻区搜索.PCL中的Kd tree的基础数据结构使用了FLANN以便可以快速的进行邻区搜索.FLANN is a librar ...
- KNN算法与Kd树
最近邻法和k-近邻法 下面图片中只有三种豆,有三个豆是未知的种类,如何判定他们的种类? 提供一种思路,即:未知的豆离哪种豆最近就认为未知豆和该豆是同一种类.由此,我们引出最近邻算法的定义:为了判定未知 ...
- k临近法的实现:kd树
# coding:utf-8 import numpy as np import matplotlib.pyplot as plt T = [[2, 3], [5, 4], [9, 6], [4, 7 ...
- 从K近邻算法谈到KD树、SIFT+BBF算法
转自 http://blog.csdn.net/v_july_v/article/details/8203674 ,感谢july的辛勤劳动 前言 前两日,在微博上说:“到今天为止,我至少亏欠了3篇文章 ...
- bzoj 3489: A simple rmq problem k-d树思想大暴力
3489: A simple rmq problem Time Limit: 10 Sec Memory Limit: 512 MBSubmit: 551 Solved: 170[Submit][ ...
- k近邻法的C++实现:kd树
1.k近邻算法的思想 给定一个训练集,对于新的输入实例,在训练集中找到与该实例最近的k个实例,这k个实例中的多数属于某个类,就把该输入实例分为这个类. 因为要找到最近的k个实例,所以计算输入实例与训练 ...
- bzoj 3053 HDU 4347 : The Closest M Points kd树
bzoj 3053 HDU 4347 : The Closest M Points kd树 题目大意:求k维空间内某点的前k近的点. 就是一般的kd树,根据实测发现,kd树的两种建树方式,即按照方差 ...
随机推荐
- LightOJ Beginners Problems 部分题解
相关代码请戳 https://coding.net/u/tiny656/p/LightOJ/git 1006 Hex-a-bonacci. 用数组模拟记录结果,注意取模 1008 Fibsieve's ...
- int 和 string 相互转换(简洁版)
string int2str(int x) { return x ? num2str(x/10)+string(1,x%10+'0') : "";} int str2int(str ...
- websocket---Html5
使用websocket主要是处理,通过服务器向页面发送消息,进行页面操作的处理. 以前类似情况,由于程序立即相应,处理事件较短,所遇采用过ajax进行轮询, 但是由于本次,需要人工干预,所以采用web ...
- Java学习笔记四——运算符
算术运算符 加减乘除(+.-.*./)就不说了. 求余运算符% 描述:第一个操作数除以第二个操作数,得到一个整除的结果后剩下的值就是余数 注意:求余预算的结果不一定总是整数,当操作数是浮点数时,结果可 ...
- 对文本行按特定字段排序(前N个字符或后N个字符),TCPL 练习5-17
The C programming language 的关于文本行排序的问题有很多种要求的方式,在对每行的字段排序方面,最简单的是例如对前N个字符或者末位N个字符进行排序,更高一点的要求是,对特殊符号 ...
- 解决Ubuntu发热量大的问题
转自:http://blog.csdn.net/tracker_w/article/details/8801971 用Ubuntu 的朋友应该都有体会,开机不久风扇就开始狂转,本本也会很热.据说是双显 ...
- C++之友元
友元提供了不同类的成员函数之间.类的成员函数与一般函数之间进行数据共享的机制.通过友元,一个不同函数或另一个类中的成员函数可以访问类中的私有成员和保护成员.C++中的友元为封装隐藏这堵不透明的墙开了一 ...
- Mac OS X上编写 ASP.NET vNext 系列中断和再开声明
这个系列其实已经中断有一段时间了,主要是由两个原因: 第一是微软那边把以前的KRE改成了XRE,所以导致前两篇有点过时了. 第二是自己年前1月份被裁员,Mac的机器被回收,再加上忙于和公司扯皮和找工作 ...
- 开始VS 2012中LightSwitch系列的第5部分:我可以使用用户权限来控制访问权吗?
[原文发表地址] Beginning LightSwitch in VS 2012 Part 5: May I? Controlling Access with User Permissions [ ...
- Java提高篇(三四)-----fail-fast机制
在JDK的Collection中我们时常会看到类似于这样的话: 例如,ArrayList: 注意,迭代器的快速失败行为无法得到保证,因为一般来说,不可能对是否出现不同步并发修改做出任何硬性保证.快速失 ...