MAVLink Onboard Integration Tutorial
MAVLink Onboard Integration Tutorial
MAVLink is a header-only library, which means that you don't have to compile it for your MCU. You just have to add mavlink/include to the list of your include directories (which is typically in your Makefile).
Please note that you can create your own messages and generate the C-code for them. Just extend the default message format xml file.
- You can find a full description of the details of the MAVLink protocol in the wiki.
Connection / Stateless
 MAVLink is stateless, but QGroundControl tracks if a system is alive using the heartbeat message. Therefore make sure to send a heartbeat every 60, 30, 10 or 1 second (1 Hz is recommended, but not required). A system will only be considered connected (and the views created for it) once a heartbeat arrives.
MAVLink is stateless, but QGroundControl tracks if a system is alive using the heartbeat message. Therefore make sure to send a heartbeat every 60, 30, 10 or 1 second (1 Hz is recommended, but not required). A system will only be considered connected (and the views created for it) once a heartbeat arrives.
Integration Architecture
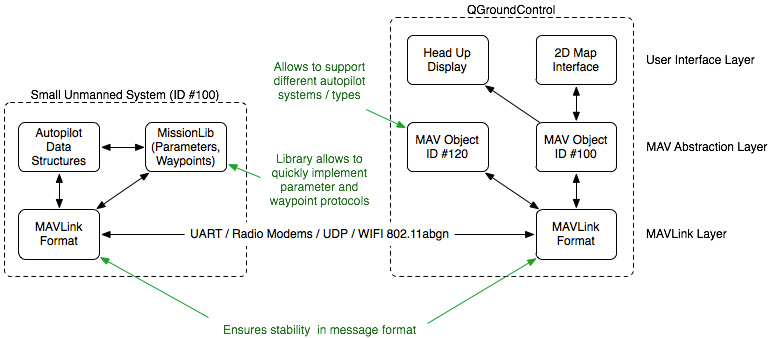
As the diagram below shows, integrating MAVLink is non-intrusive. MAVLink does not need to become a central part of the onboard architecture. The provided missionlib handles parameter and mission / waypoint transmission, the autopilot only needs to read off the values from the appropriate data structures.
MAVLink has a very stable message format, one of the primary reasons so many GCS and autopilots support it. If QGroundControl is used for a non-standard application, the UAS object can be sub-classed and QGroundControl can be fully customized to not only use a custom set of MAVLink messages, but also to handle them in a custom C++ class.
Quick Integration: Sending data
This approach takes more lines of code per message, but gets you instantly started.
/* The default UART header for your MCU */
#include "uart.h"
#include <mavlink/v1.0/common/mavlink.h>
mavlink_system_t mavlink_system;
mavlink_system.sysid = 20; ///< ID 20 for this airplane
mavlink_system.compid = MAV_COMP_ID_IMU; ///< The component sending the message is the IMU, it could be also a Linux process
// Define the system type, in this case an airplane
uint8_t system_type = MAV_TYPE_FIXED_WING;
uint8_t autopilot_type = MAV_AUTOPILOT_GENERIC;
uint8_t system_mode = MAV_MODE_PREFLIGHT; ///< Booting up
uint32_t custom_mode = 0; ///< Custom mode, can be defined by user/adopter
uint8_t system_state = MAV_STATE_STANDBY; ///< System ready for flight
// Initialize the required buffers
mavlink_message_t msg;
uint8_t buf[MAVLINK_MAX_PACKET_LEN];
// Pack the message
mavlink_msg_heartbeat_pack(mavlink_system.sysid, mavlink_system.compid, &msg, system_type, autopilot_type, system_mode, custom_mode, system_state);
// Copy the message to the send buffer
uint16_t len = mavlink_msg_to_send_buffer(buf, &msg);
// Send the message with the standard UART send function
// uart0_send might be named differently depending on
// the individual microcontroller / library in use.
uart0_send(buf, len);
Receive Function
The function above describes how to send data with/without the convenience functions. The code snippet below shows how to receive data. The runtime is quite low, so we advise to run this function at mainloop rate and empty the UART buffer as fast as possible.
#include <mavlink/v1.0/common/mavlink.h>
// Example variable, by declaring them static they're persistent
// and will thus track the system state
static int packet_drops = 0;
static int mode = MAV_MODE_UNINIT; /* Defined in mavlink_types.h, which is included by mavlink.h */
/**
* @brief Receive communication packets and handle them
*
* This function decodes packets on the protocol level and also handles
* their value by calling the appropriate functions.
*/
static void communication_receive(void)
{
mavlink_message_t msg;
mavlink_status_t status;
// COMMUNICATION THROUGH EXTERNAL UART PORT (XBee serial)
while(uart0_char_available())
{
uint8_t c = uart0_get_char();
// Try to get a new message
if(mavlink_parse_char(MAVLINK_COMM_0, c, &msg, &status)) {
// Handle message
switch(msg.msgid)
{
case MAVLINK_MSG_ID_HEARTBEAT:
{
// E.g. read GCS heartbeat and go into
// comm lost mode if timer times out
}
break;
case MAVLINK_MSG_ID_COMMAND_LONG:
// EXECUTE ACTION
break;
default:
//Do nothing
break;
}
}
// And get the next one
}
// Update global packet drops counter
packet_drops += status.packet_rx_drop_count;
// COMMUNICATION THROUGH SECOND UART
while(uart1_char_available())
{
uint8_t c = uart1_get_char();
// Try to get a new message
if(mavlink_parse_char(MAVLINK_COMM_1, c, &msg, &status))
{
// Handle message the same way like in for UART0
// you can also consider to write a handle function like
// handle_mavlink(mavlink_channel_t chan, mavlink_message_t* msg)
// Which handles the messages for both or more UARTS
}
// And get the next one
}
// Update global packet drops counter
packet_drops += status.packet_rx_drop_count;
}
Integration with convenience functions
WITH convenience functions
MAVLink offers convenience functions for easy sending of packets. If you want to use these, you have to provide a specific function in your code. This approach takes less lines of code per message, but requires you to write the adapter header. Please find an example for such an adapter header below. We advise to start off WITHOUT convenience functions, send your first message to the GCS and then add the adapter header if needed.
#include "your_mavlink_bridge_header.h"
/* You have to #define MAVLINK_USE_CONVENIENCE_FUNCTIONS in your_mavlink_bridge_header,
and you have to declare: mavlink_system_t mavlink_system;
these two variables will be used internally by the mavlink_msg_xx_send() functions.
Please see the section below for an example of such a bridge header. */
#include <mavlink.h>
// Define the system type, in this case an airplane
int system_type = MAV_FIXED_WING;
// Send a heartbeat over UART0 including the system type
mavlink_msg_heartbeat_send(MAVLINK_COMM_0, system_type, MAV_AUTOPILOT_GENERIC, MAV_MODE_MANUAL_DISARMED, MAV_STATE_STANDBY);
MAVLink Adapter Header for Convenience Send Functions
This code example was written with a microcontroller in mind, what most external users will want to use. For examples for C++, please have a look at e.g. PX4/Firmware mavlink app.
SEND C-CODE
Define this function, according to your MCU (you can add more than two UARTS). If this function is defined, you then can use the 'mavlink_msg_xx_send(MAVLINK_COMM_x, data1, data2, ..)' functions to conveniently send data.
your_mavlink_bridge_header.h
/* MAVLink adapter header */
#ifndef YOUR_MAVLINK_BRIDGE_HEADER_H
#define YOUR_MAVLINK_BRIDGE_HEADER_H
#define MAVLINK_USE_CONVENIENCE_FUNCTIONS
#include <mavlink/v1.0/mavlink_types.h>
/* Struct that stores the communication settings of this system.
you can also define / alter these settings elsewhere, as long
as they're included BEFORE mavlink.h.
So you can set the
mavlink_system.sysid = 100; // System ID, 1-255
mavlink_system.compid = 50; // Component/Subsystem ID, 1-255
Lines also in your main.c, e.g. by reading these parameter from EEPROM.
*/
mavlink_system_t mavlink_system;
mavlink_system.sysid = 100; // System ID, 1-255
mavlink_system.compid = 50; // Component/Subsystem ID, 1-255
/**
* @brief Send one char (uint8_t) over a comm channel
*
* @param chan MAVLink channel to use, usually MAVLINK_COMM_0 = UART0
* @param ch Character to send
*/
static inline void comm_send_ch(mavlink_channel_t chan, uint8_t ch)
{
if (chan == MAVLINK_COMM_0)
{
uart0_transmit(ch);
}
if (chan == MAVLINK_COMM_1)
{
uart1_transmit(ch);
}
}
#endif /* YOUR_MAVLINK_BRIDGE_HEADER_H */
MAVLink Onboard Integration Tutorial的更多相关文章
- MAVLink Linux/QNX/MacOs Integration Tutorial (UDP)
MAVLink Linux/QNX/MacOs Integration Tutorial (UDP) Overview This program was written to test the udp ...
- springmvc4开发rest
Spring MVC 4 RESTFul Web Services CRUD Example+RestTemplate Created on: August 11, 2015 | Last upd ...
- Gazebo機器人仿真學習探索筆記(七)连接ROS
中文稍后补充,先上官方原版教程.ROS Kinetic 搭配 Gazebo 7 附件----官方教程 Tutorial: ROS integration overview As of Gazebo 1 ...
- Unity 官方教程 学习
Interface & Essentials Using the Unity Interface 1.Interface Overview https://unity3d.com/cn/lea ...
- 【Spring实战】----开篇(包含系列目录链接)
[Spring实战]----开篇(包含系列目录链接) 置顶2016年11月10日 11:12:56 阅读数:3617 终于还是要对Spring进行解剖,接下来Spring实战篇系列会以应用了Sprin ...
- JCaptcha+Memcache的验证码集群实现
一.问题背景 为了防止垃圾信息发布机器人的自动提交攻击,采用CAPTCHA验证码来保护该模块,提高攻击者的成本. 二.验证码简介 全自动区分计算机和人类的图灵测试(Completely Automat ...
- Spring 4 MVC+Apache Tiles 3 Example
In this post we will integrate Apache Tiles 3 with Spring MVC 4, using annotation-based configuratio ...
- Open Daylight integration with OpenStack: a tutorial
Open Daylight integration with OpenStack: a tutorial How to deploy OpenDaylight and integrate it wit ...
- Spring MVC Hibernate MySQL Integration(集成) CRUD Example Tutorial【摘】
Spring MVC Hibernate MySQL Integration(集成) CRUD Example Tutorial We learned how to integrate Spring ...
随机推荐
- django blank
null: If True, Django will store empty values as NULL in the database. Defaultis False. 如果为True,空值将会 ...
- php 使用 rabbitmq
1,配置好rabbitmq 服务器 (参照 http://www.cnblogs.com/spicy/p/7017603.html)(我是linux) 2,新增了一个用户 并点击该用户 增加权限如下
- 【分步详解】两个有序数组中的中位数和Top K问题
(这也是一道leetcode的经典题目:<LeetCode>解题笔记:004. Median of Two Sorted Arrays[H] 问题介绍 这是个超级超级经典的分治算法!!这个 ...
- 微服务Kong(三)——添加一个API
在开始前,请确保您已经安装了KONG服务,并且已经启动了KONG服务. 在本节中,您可以学习到:如何在KONG层添加一个API.这是您使用KONG来管理您的API的第一步.对于此篇教程,我们将使用 h ...
- Linux-socket使用
socket 产生的原因 进程通信的概念最初来源于单机系统.由于每个进程都在自己的地址范围内运行,为保证两个相互通信的进程之间既互不干扰又协调一致工作,操作系统为进程通信提供了相应设施,如 UNIX ...
- java代理-cglib
前面说到了java的动态代理,但是动态代理依赖于接口,这次来看看cglib来实现的代理... 假设有如下方法,这回没有说接口哦~ package proxy.cglibProxy; public cl ...
- mysql中sql中的注释
学习mysql好久了,oracle也是,但是经常使用oracle,有一天突然想,oracle的sql语法中有注释,那么mysql中是不是也有注释,于是从网上搜了一下,原来mysql中的注释还真不少,下 ...
- 【LeetCode题解】94_二叉树的中序遍历
目录 [LeetCode题解]94_二叉树的中序遍历 描述 方法一:递归 Java 代码 Python代码 方法二:非递归 Java 代码 Python 代码 [LeetCode题解]94_二叉树的中 ...
- Java责任链模式
责任链模式 顾名思义,责任链模式(Chain of Responsibility Pattern)为请求创建了一个接收者对象的链.这种模式给予请求的类型,对请求的发送者和接收者进行解耦.这种类型的设计 ...
- 转:Java 基本数据类型
Java 基本数据类型 转:http://www.runoob.com/java/java-basic-datatypes.html 变量就是申请内存来存储值.也就是说,当创建变量的时候,需要在内存中 ...
The function above describes how to send data with/without the convenience functions. The code snippet below shows how to receive data. The runtime is quite low, so we advise to run this function at mainloop rate and empty the UART buffer as fast as possible.
#include <mavlink/v1.0/common/mavlink.h>
// Example variable, by declaring them static they're persistent
// and will thus track the system state
static int packet_drops = 0;
static int mode = MAV_MODE_UNINIT; /* Defined in mavlink_types.h, which is included by mavlink.h */
/**
* @brief Receive communication packets and handle them
*
* This function decodes packets on the protocol level and also handles
* their value by calling the appropriate functions.
*/
static void communication_receive(void)
{
mavlink_message_t msg;
mavlink_status_t status;
// COMMUNICATION THROUGH EXTERNAL UART PORT (XBee serial)
while(uart0_char_available())
{
uint8_t c = uart0_get_char();
// Try to get a new message
if(mavlink_parse_char(MAVLINK_COMM_0, c, &msg, &status)) {
// Handle message
switch(msg.msgid)
{
case MAVLINK_MSG_ID_HEARTBEAT:
{
// E.g. read GCS heartbeat and go into
// comm lost mode if timer times out
}
break;
case MAVLINK_MSG_ID_COMMAND_LONG:
// EXECUTE ACTION
break;
default:
//Do nothing
break;
}
}
// And get the next one
}
// Update global packet drops counter
packet_drops += status.packet_rx_drop_count;
// COMMUNICATION THROUGH SECOND UART
while(uart1_char_available())
{
uint8_t c = uart1_get_char();
// Try to get a new message
if(mavlink_parse_char(MAVLINK_COMM_1, c, &msg, &status))
{
// Handle message the same way like in for UART0
// you can also consider to write a handle function like
// handle_mavlink(mavlink_channel_t chan, mavlink_message_t* msg)
// Which handles the messages for both or more UARTS
}
// And get the next one
}
// Update global packet drops counter
packet_drops += status.packet_rx_drop_count;
}
WITH convenience functions
MAVLink offers convenience functions for easy sending of packets. If you want to use these, you have to provide a specific function in your code. This approach takes less lines of code per message, but requires you to write the adapter header. Please find an example for such an adapter header below. We advise to start off WITHOUT convenience functions, send your first message to the GCS and then add the adapter header if needed.
#include "your_mavlink_bridge_header.h"
/* You have to #define MAVLINK_USE_CONVENIENCE_FUNCTIONS in your_mavlink_bridge_header,
and you have to declare: mavlink_system_t mavlink_system;
these two variables will be used internally by the mavlink_msg_xx_send() functions.
Please see the section below for an example of such a bridge header. */
#include <mavlink.h>
// Define the system type, in this case an airplane
int system_type = MAV_FIXED_WING;
// Send a heartbeat over UART0 including the system type
mavlink_msg_heartbeat_send(MAVLINK_COMM_0, system_type, MAV_AUTOPILOT_GENERIC, MAV_MODE_MANUAL_DISARMED, MAV_STATE_STANDBY);
MAVLink Adapter Header for Convenience Send Functions
This code example was written with a microcontroller in mind, what most external users will want to use. For examples for C++, please have a look at e.g. PX4/Firmware mavlink app.
SEND C-CODE
Define this function, according to your MCU (you can add more than two UARTS). If this function is defined, you then can use the 'mavlink_msg_xx_send(MAVLINK_COMM_x, data1, data2, ..)' functions to conveniently send data.
your_mavlink_bridge_header.h
/* MAVLink adapter header */
#ifndef YOUR_MAVLINK_BRIDGE_HEADER_H
#define YOUR_MAVLINK_BRIDGE_HEADER_H
#define MAVLINK_USE_CONVENIENCE_FUNCTIONS
#include <mavlink/v1.0/mavlink_types.h>
/* Struct that stores the communication settings of this system.
you can also define / alter these settings elsewhere, as long
as they're included BEFORE mavlink.h.
So you can set the
mavlink_system.sysid = 100; // System ID, 1-255
mavlink_system.compid = 50; // Component/Subsystem ID, 1-255
Lines also in your main.c, e.g. by reading these parameter from EEPROM.
*/
mavlink_system_t mavlink_system;
mavlink_system.sysid = 100; // System ID, 1-255
mavlink_system.compid = 50; // Component/Subsystem ID, 1-255
/**
* @brief Send one char (uint8_t) over a comm channel
*
* @param chan MAVLink channel to use, usually MAVLINK_COMM_0 = UART0
* @param ch Character to send
*/
static inline void comm_send_ch(mavlink_channel_t chan, uint8_t ch)
{
if (chan == MAVLINK_COMM_0)
{
uart0_transmit(ch);
}
if (chan == MAVLINK_COMM_1)
{
uart1_transmit(ch);
}
}
#endif /* YOUR_MAVLINK_BRIDGE_HEADER_H */
MAVLink Onboard Integration Tutorial的更多相关文章
- MAVLink Linux/QNX/MacOs Integration Tutorial (UDP)
MAVLink Linux/QNX/MacOs Integration Tutorial (UDP) Overview This program was written to test the udp ...
- springmvc4开发rest
Spring MVC 4 RESTFul Web Services CRUD Example+RestTemplate Created on: August 11, 2015 | Last upd ...
- Gazebo機器人仿真學習探索筆記(七)连接ROS
中文稍后补充,先上官方原版教程.ROS Kinetic 搭配 Gazebo 7 附件----官方教程 Tutorial: ROS integration overview As of Gazebo 1 ...
- Unity 官方教程 学习
Interface & Essentials Using the Unity Interface 1.Interface Overview https://unity3d.com/cn/lea ...
- 【Spring实战】----开篇(包含系列目录链接)
[Spring实战]----开篇(包含系列目录链接) 置顶2016年11月10日 11:12:56 阅读数:3617 终于还是要对Spring进行解剖,接下来Spring实战篇系列会以应用了Sprin ...
- JCaptcha+Memcache的验证码集群实现
一.问题背景 为了防止垃圾信息发布机器人的自动提交攻击,采用CAPTCHA验证码来保护该模块,提高攻击者的成本. 二.验证码简介 全自动区分计算机和人类的图灵测试(Completely Automat ...
- Spring 4 MVC+Apache Tiles 3 Example
In this post we will integrate Apache Tiles 3 with Spring MVC 4, using annotation-based configuratio ...
- Open Daylight integration with OpenStack: a tutorial
Open Daylight integration with OpenStack: a tutorial How to deploy OpenDaylight and integrate it wit ...
- Spring MVC Hibernate MySQL Integration(集成) CRUD Example Tutorial【摘】
Spring MVC Hibernate MySQL Integration(集成) CRUD Example Tutorial We learned how to integrate Spring ...
随机推荐
- django blank
null: If True, Django will store empty values as NULL in the database. Defaultis False. 如果为True,空值将会 ...
- php 使用 rabbitmq
1,配置好rabbitmq 服务器 (参照 http://www.cnblogs.com/spicy/p/7017603.html)(我是linux) 2,新增了一个用户 并点击该用户 增加权限如下
- 【分步详解】两个有序数组中的中位数和Top K问题
(这也是一道leetcode的经典题目:<LeetCode>解题笔记:004. Median of Two Sorted Arrays[H] 问题介绍 这是个超级超级经典的分治算法!!这个 ...
- 微服务Kong(三)——添加一个API
在开始前,请确保您已经安装了KONG服务,并且已经启动了KONG服务. 在本节中,您可以学习到:如何在KONG层添加一个API.这是您使用KONG来管理您的API的第一步.对于此篇教程,我们将使用 h ...
- Linux-socket使用
socket 产生的原因 进程通信的概念最初来源于单机系统.由于每个进程都在自己的地址范围内运行,为保证两个相互通信的进程之间既互不干扰又协调一致工作,操作系统为进程通信提供了相应设施,如 UNIX ...
- java代理-cglib
前面说到了java的动态代理,但是动态代理依赖于接口,这次来看看cglib来实现的代理... 假设有如下方法,这回没有说接口哦~ package proxy.cglibProxy; public cl ...
- mysql中sql中的注释
学习mysql好久了,oracle也是,但是经常使用oracle,有一天突然想,oracle的sql语法中有注释,那么mysql中是不是也有注释,于是从网上搜了一下,原来mysql中的注释还真不少,下 ...
- 【LeetCode题解】94_二叉树的中序遍历
目录 [LeetCode题解]94_二叉树的中序遍历 描述 方法一:递归 Java 代码 Python代码 方法二:非递归 Java 代码 Python 代码 [LeetCode题解]94_二叉树的中 ...
- Java责任链模式
责任链模式 顾名思义,责任链模式(Chain of Responsibility Pattern)为请求创建了一个接收者对象的链.这种模式给予请求的类型,对请求的发送者和接收者进行解耦.这种类型的设计 ...
- 转:Java 基本数据类型
Java 基本数据类型 转:http://www.runoob.com/java/java-basic-datatypes.html 变量就是申请内存来存储值.也就是说,当创建变量的时候,需要在内存中 ...