倍福TwinCAT(贝福Beckhoff)基础教程7.1 TwinCAT 如何简单执行NC功能块 TC3
这一节我们介绍简单的NC运动(前面所讲的所有内容都是PLC编程和HMI的界面,算是基础知识),这里NC就是控制伺服电机的部分(当然还不是实际的NC轴,是虚拟轴,但是用到的函数都是一样,可以为后面的实际应用做准备),既然用到了贝福的NC功能,就要添加对应的库
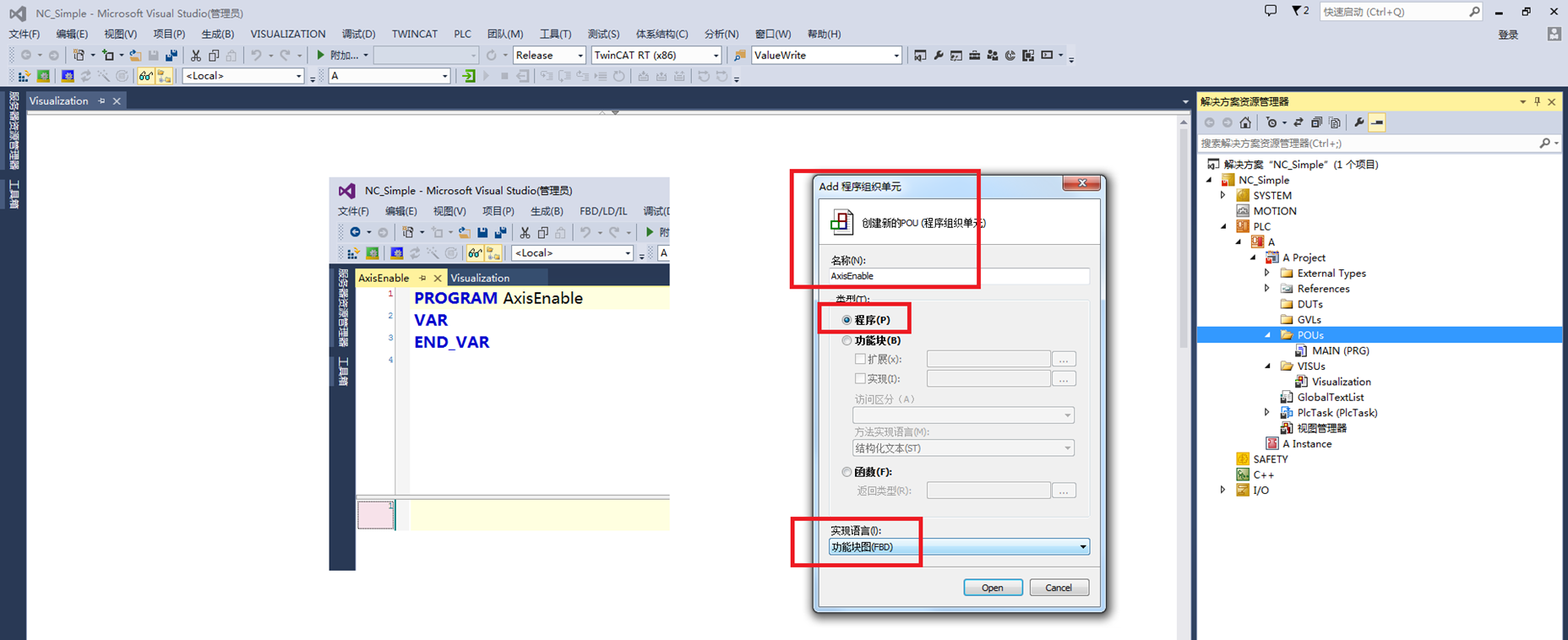
首先添加一个让轴上使能的PRG(注意是FBD格式)
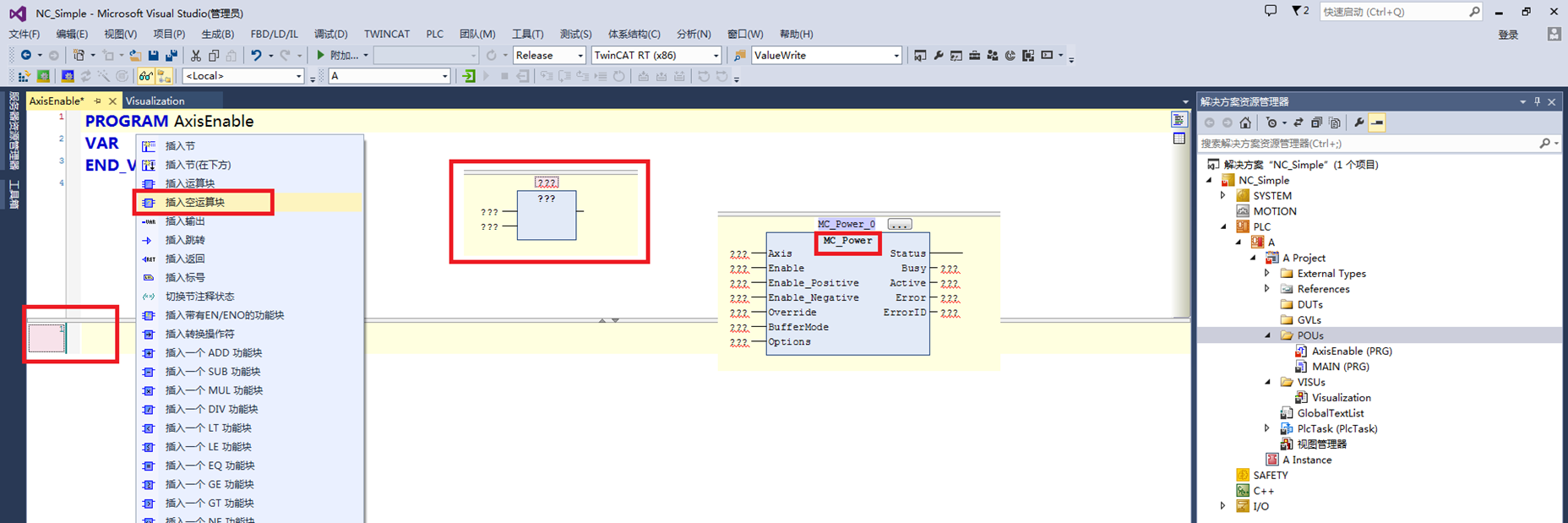
在第一个空行后面插入空运算块,然后在中间的???里面输入运算块的名称(NC的函数名,NC的函数就是控制轴运动的函数,无非是上使能,下使能,位置,速度等等运动,跟运动控制卡提供的函数类似),输入MC_Power之后,该块直接变成了指定的形式(左侧的都是输入,右侧的都是输出)
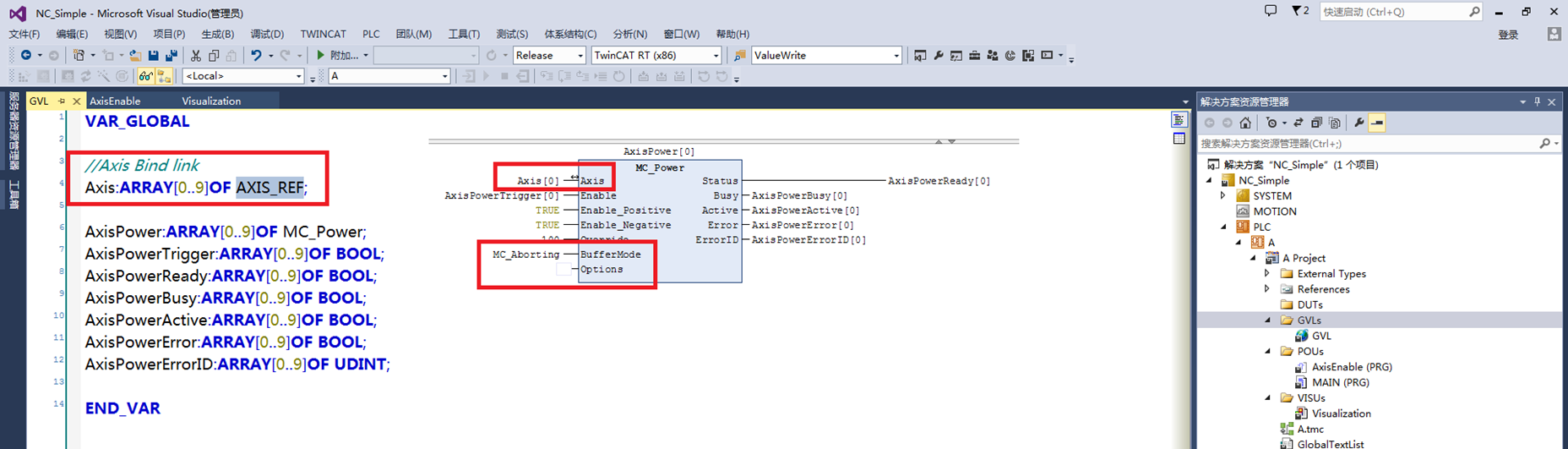
NC的函数本质是一个FB的功能块,而且注意TC2和TC3的不太一样,最大的区别就是TC3把跟轴交互的输入输出变量做成了一个(这个以后会讲到),我们只要记住在TC3中一个轴跟NC交互的就是一个AXIS_REF类型变量,这里把所有变量都定义成10个元素的数组,是为了方便(假如有多个轴要绑定就不需要再声明这么多变量了),左侧的BufferMode和Options也可以不管照抄即可(前面讲了很多贝福的模块很复杂,而实际上我们用到的部分很简单,所以不需要每个细节都掌握)
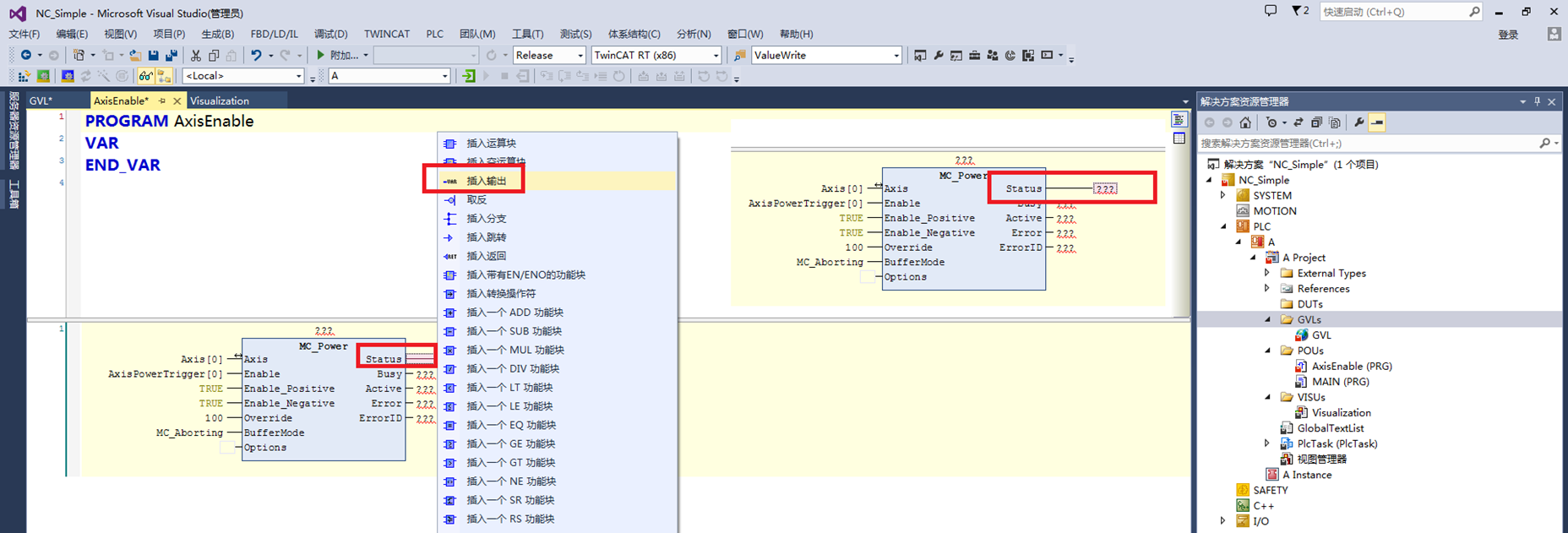
右侧如果没有输出符号,可以右击引脚,然后插入输出即可
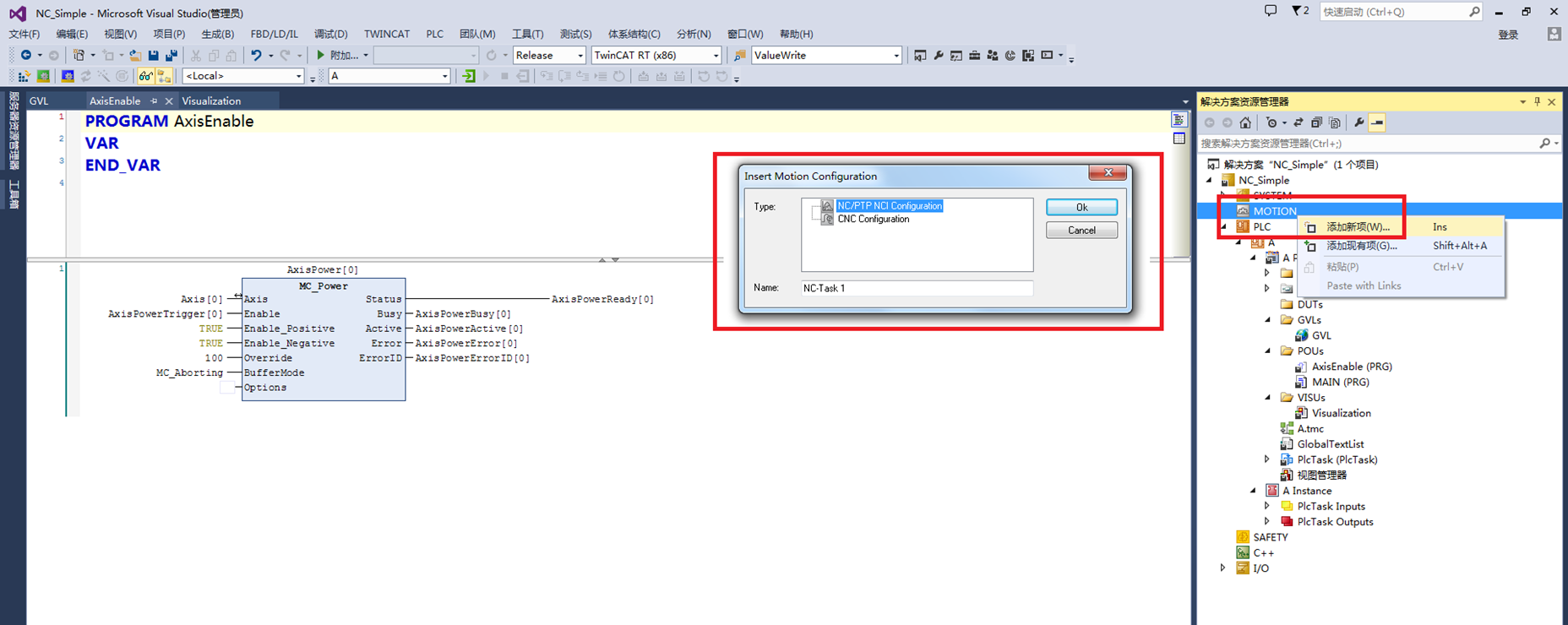
我们既然定义好了这样一个功能块,如何使用呢?首先添加一个NC的配置项目(PLC的配置和NC的配置本质上是分开的,因为NC就是对所有IO输入输出的配置,而PLC程序怎么写跟外部设备怎么配没关系)
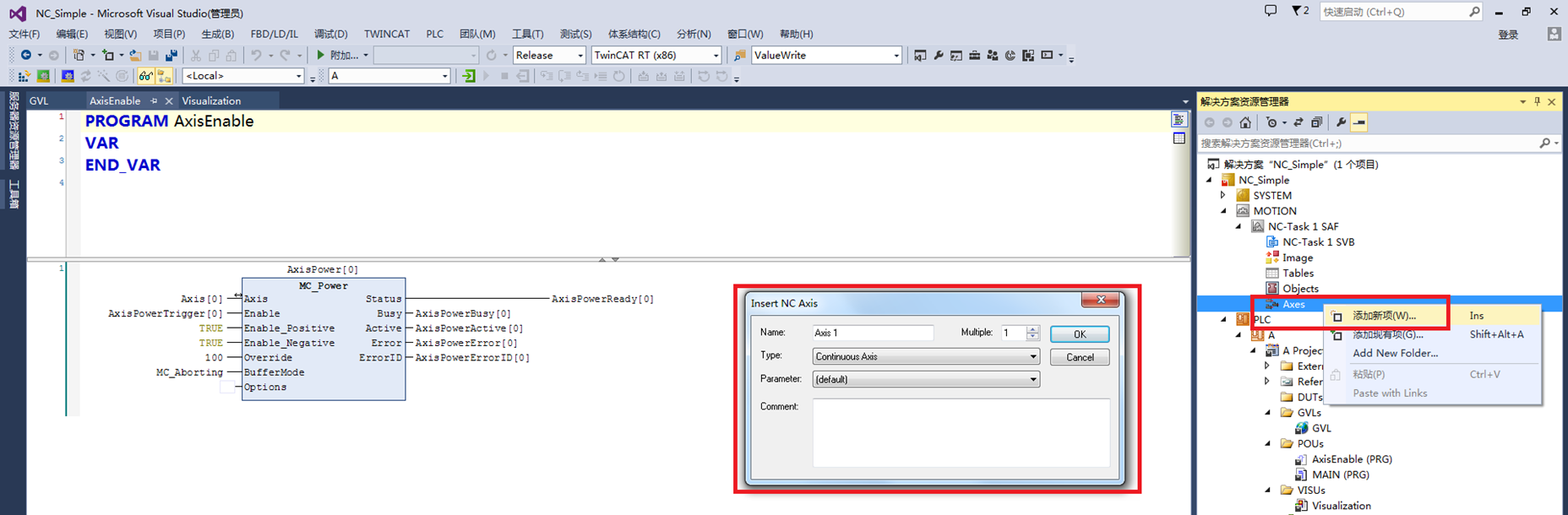
在Axis上右击添加一个新的轴(所有参数保持默认即可)
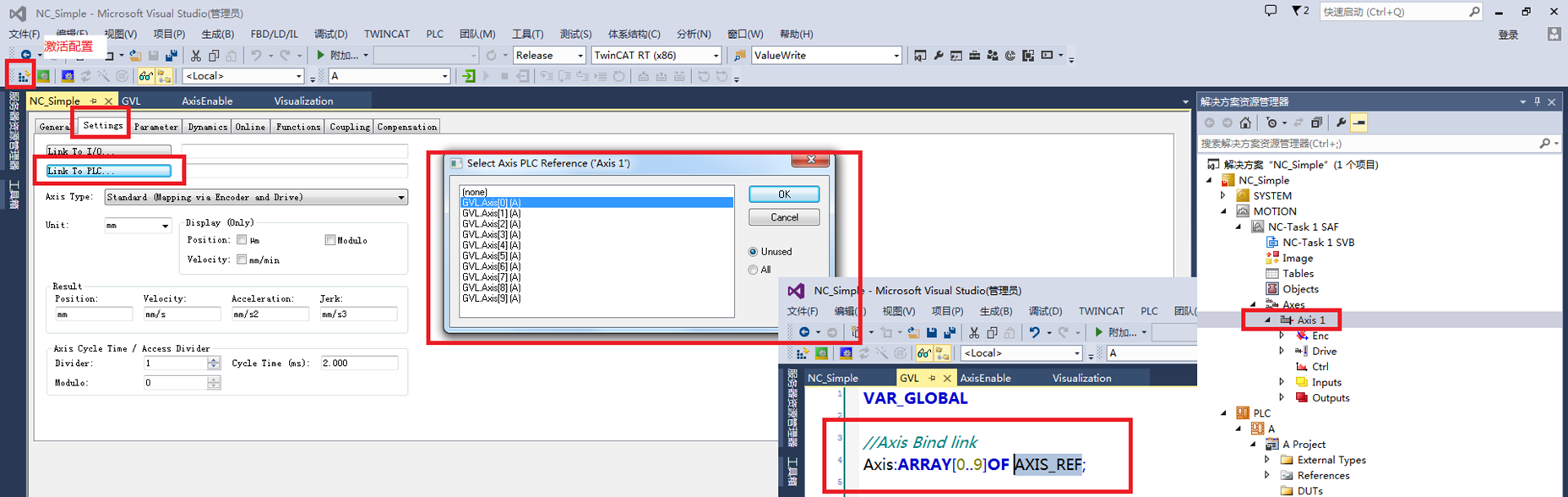
双击Axis 1,然后在Settings中把Link To PLC设置成一个PLC中的对应变量(注意前面创建完了AXIS_REF变量之后要点击激活配置,否则这里不会自动弹出来有效变量)
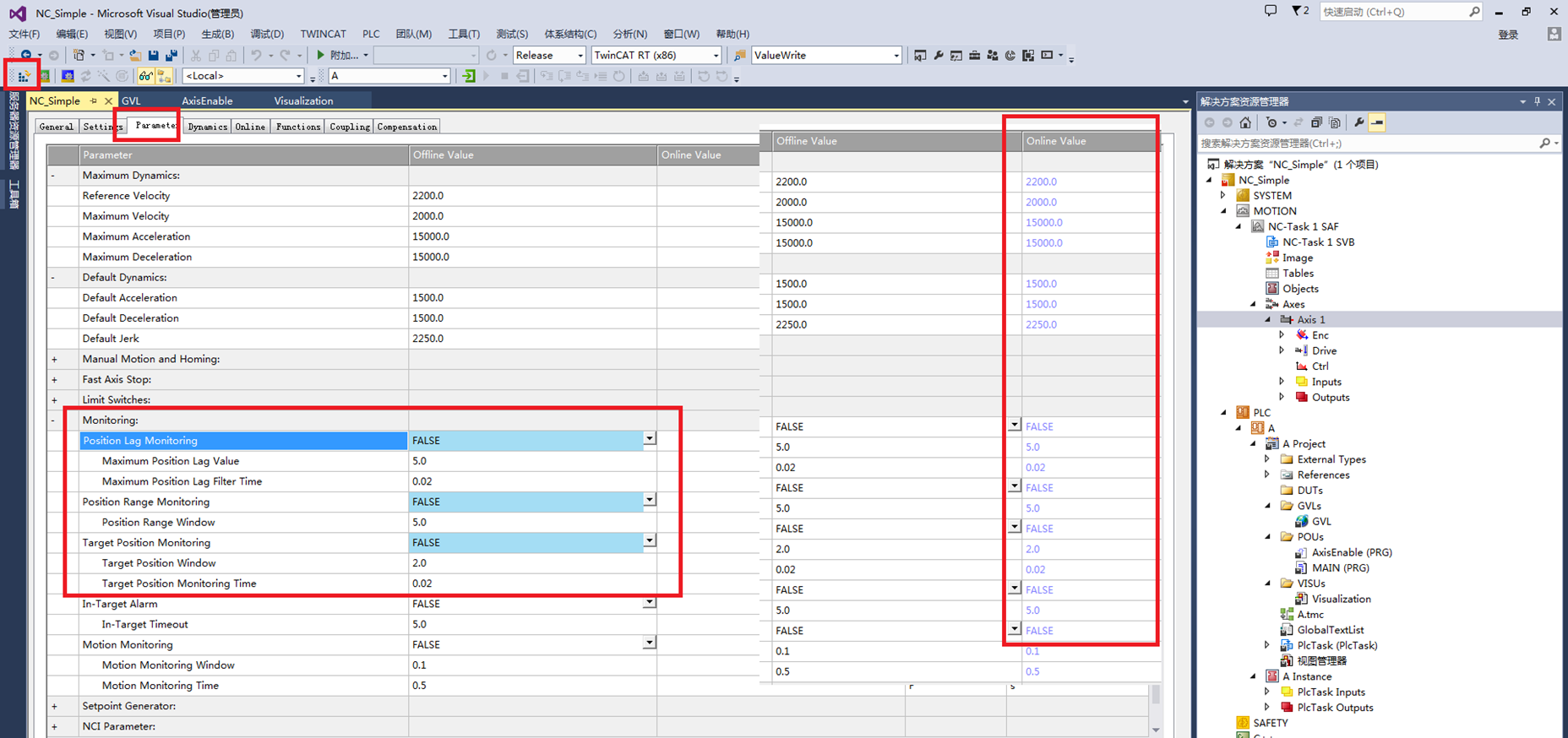
如果是实际的轴还需要配置其他参数,比如编码器分辨率,但是虚拟的就无所谓了,只需要把Monitoring中的跟随误差检测这些设置为FALSE即可,设置完了还是点击左上角的激活配置,确认Online value也是FALSE才说明真的写进去了
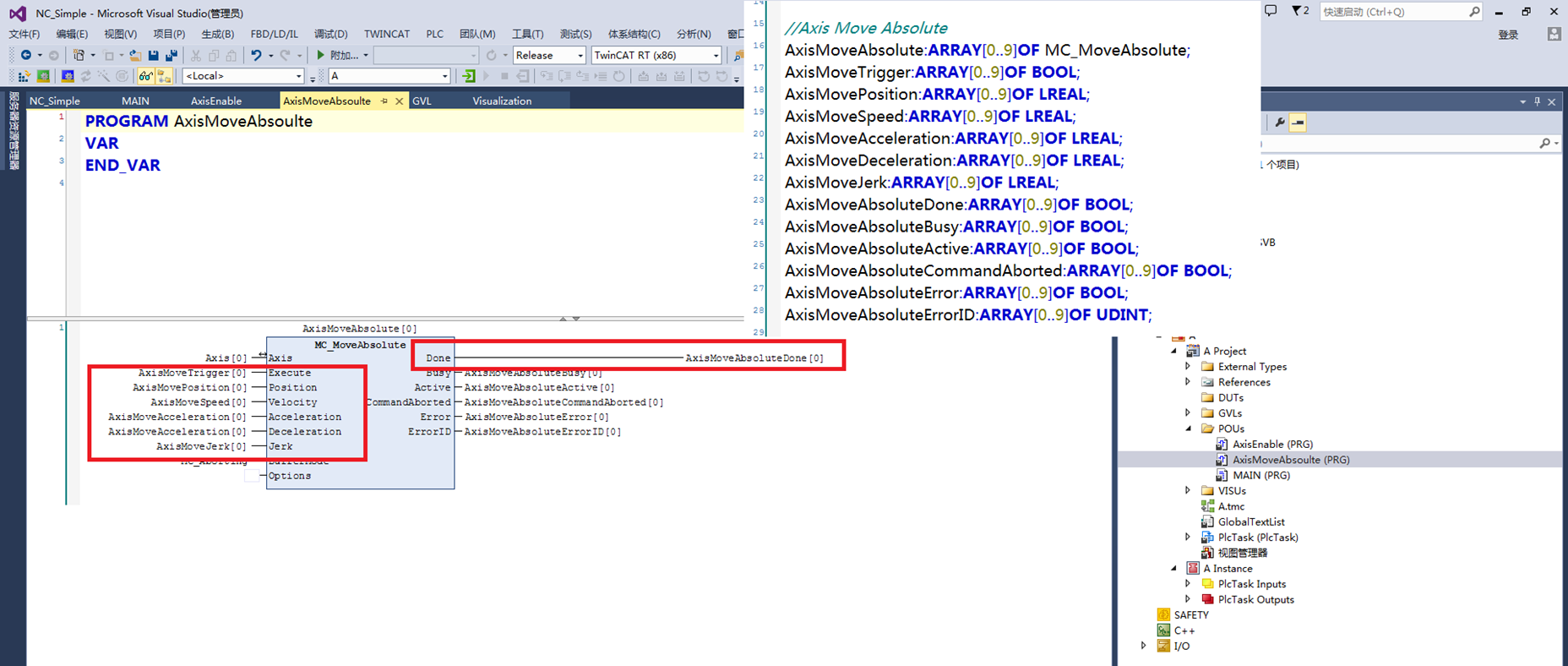
NC的简单配置完成之后,我们继续写程序要实现的功能,为了简单只使用一个绝对运动功能块,输入还是一个上升沿触发,注意输出仅当已经到达目标位置的时候Done才是TRUE,否则为FALSE,一个绝对运动模块需要位置,速度,加速度,减速度,加加速度这些参数(S曲线的PTP运动),我们还是使用数组来对应
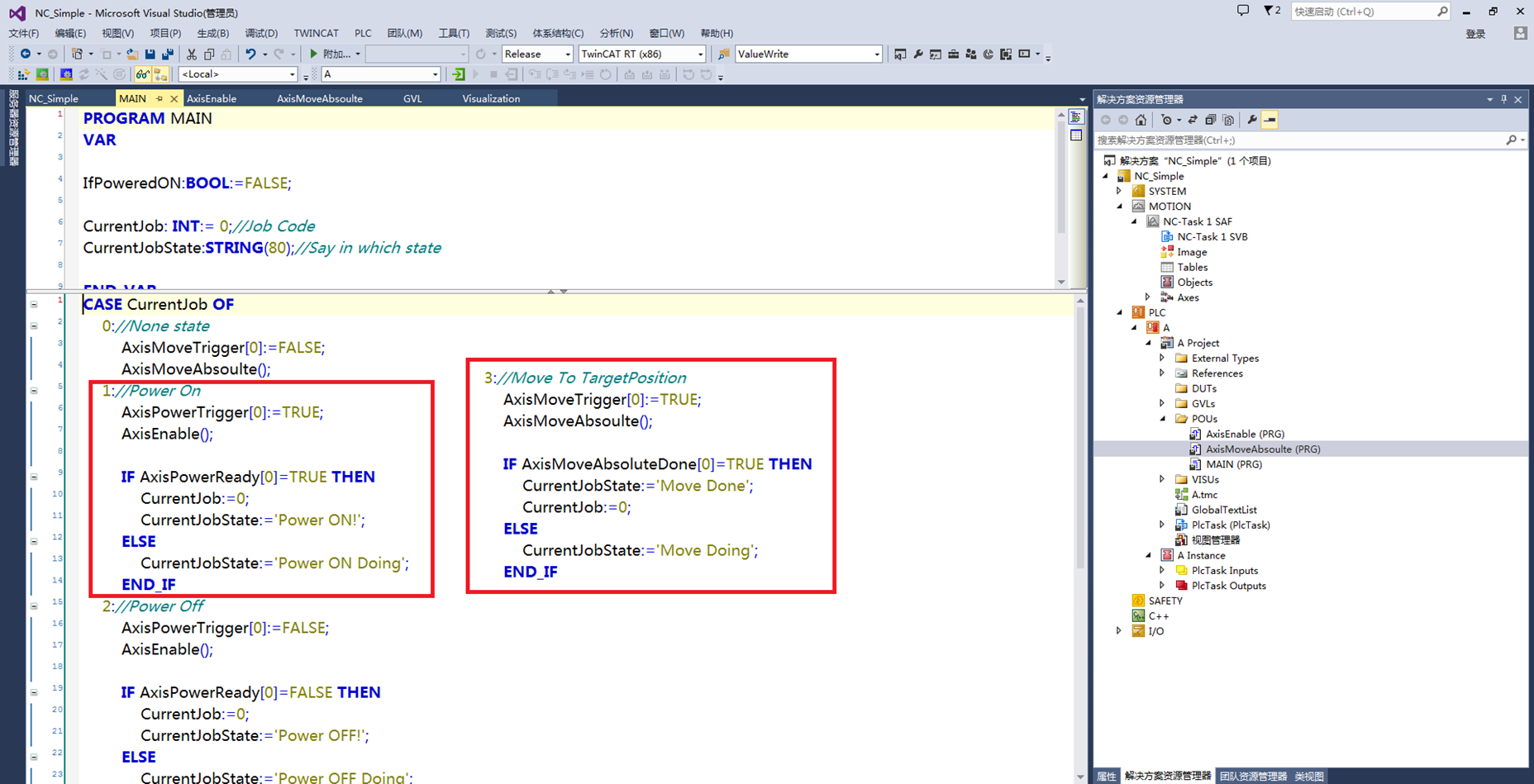
这些都有了之后,程序就很好写了,在0状态的情况下,将绝对运动模块复位,点击按钮将可以上使能和下使能,也可以让虚拟轴按照给定的运动参数运动到指定的位置,注意为了在人机界面中可以看到程序的执行情况,还是做了一个字符串表示是否上使能成功,是否运动完成
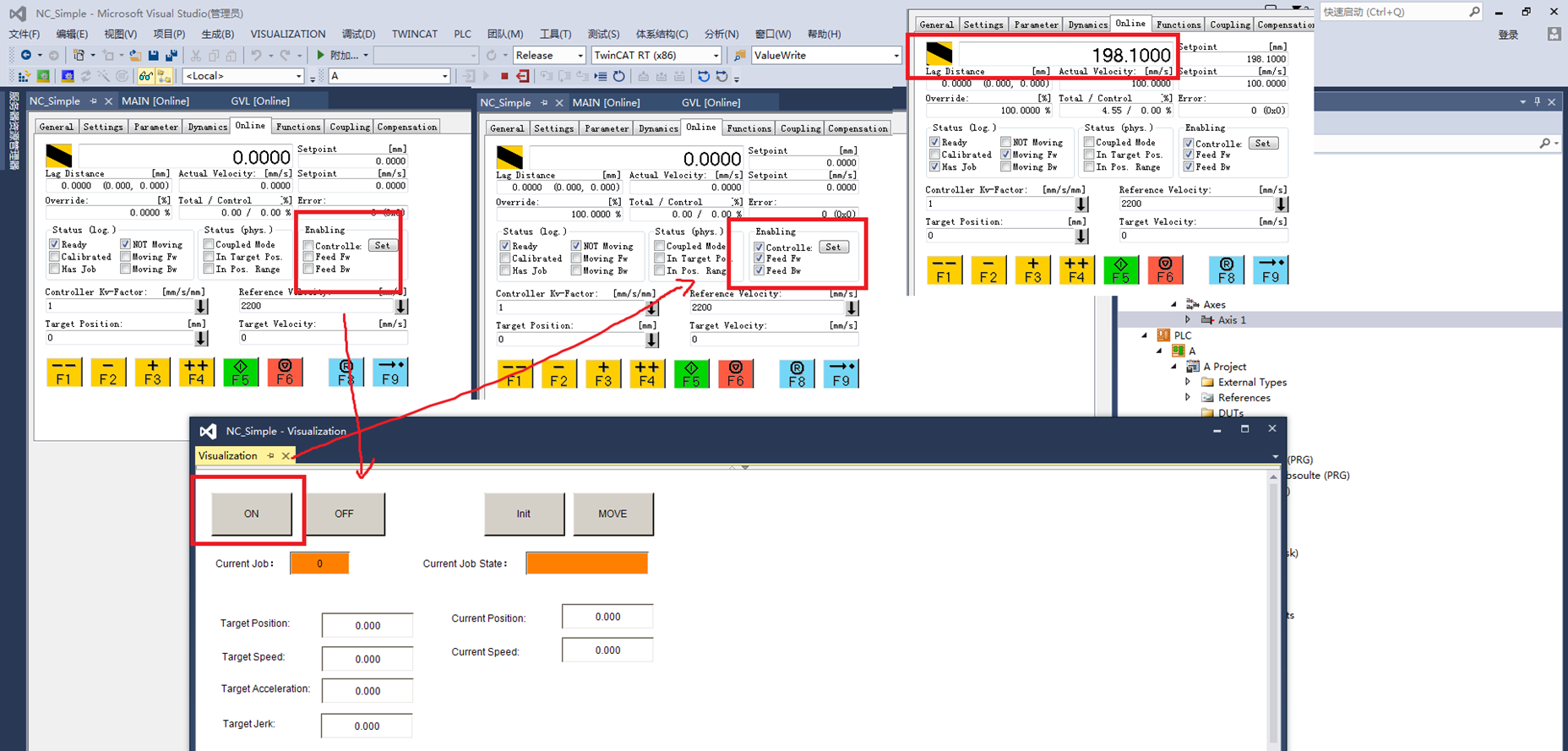
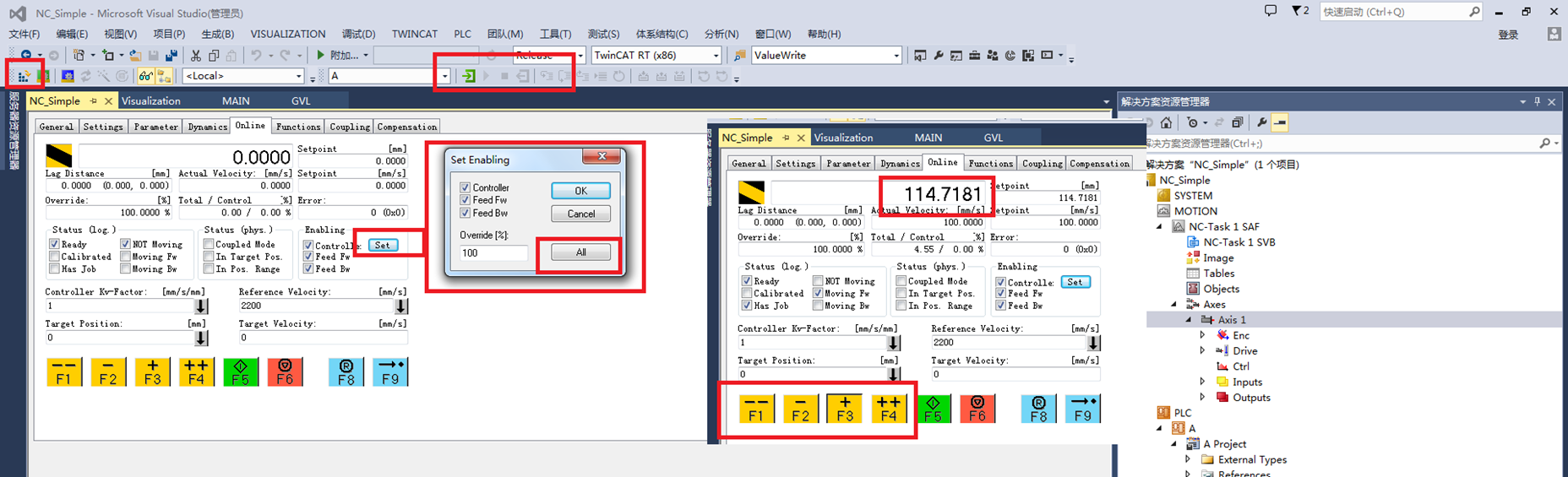
注意打开Axis 1的Online页面对照,点击上使能,下使能,绝对运动执行的时候,都可以在这个页面看到轴的数据变化(当然这里只是测试了最简单的两个模块,实际上轴运动的时候可能会报错,会需要采集错误的模块,清除错误的模块,还需要停止运动的模块等等,都将在实际应用案例中讲解)
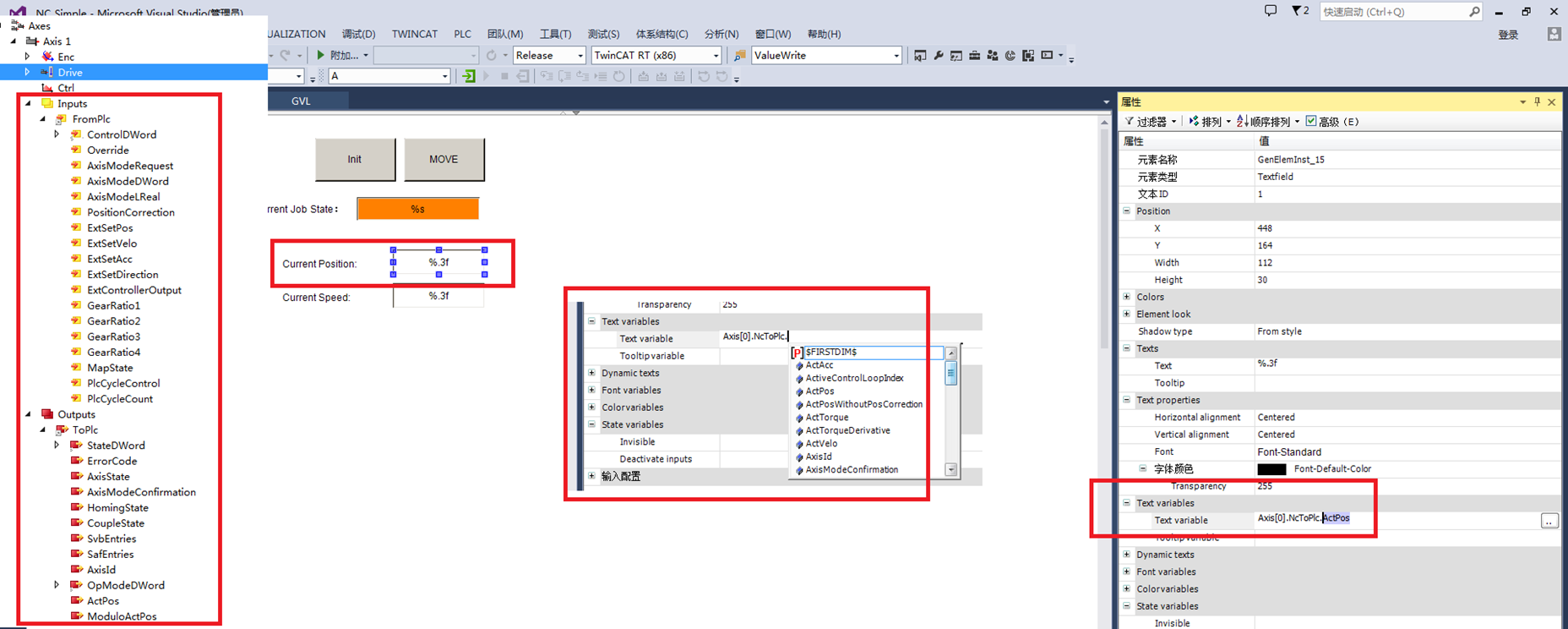
理论上,获取轴的位置,速度都是有指定方法的(如MC_ReadActualPosition),这里为了简单,还是只是用了轴的自身的属性(可以对AXIS_REF类型加深理解,一个AXIS_REF类型包括了FromPLC和ToPlc的两部分数据,PLC程序可以从一个AXIS_REF类型中获取到指定的数据或设置AXIS_REF的数据,在本节的另一篇文章中将介绍在TC2中同样的内容的做法,TC2是讲两部分数据分开的,需要分别绑定到同一个轴上)
事实上,在配置好一个虚拟轴(实际轴也是一样)之后,激活配置,不运行PLC程序,也可以通过每个Axis页面的Online测试这个轴,比如Set-All可以伺服上使能,F2,F3可以慢速点动,F1,F4可以快速点动
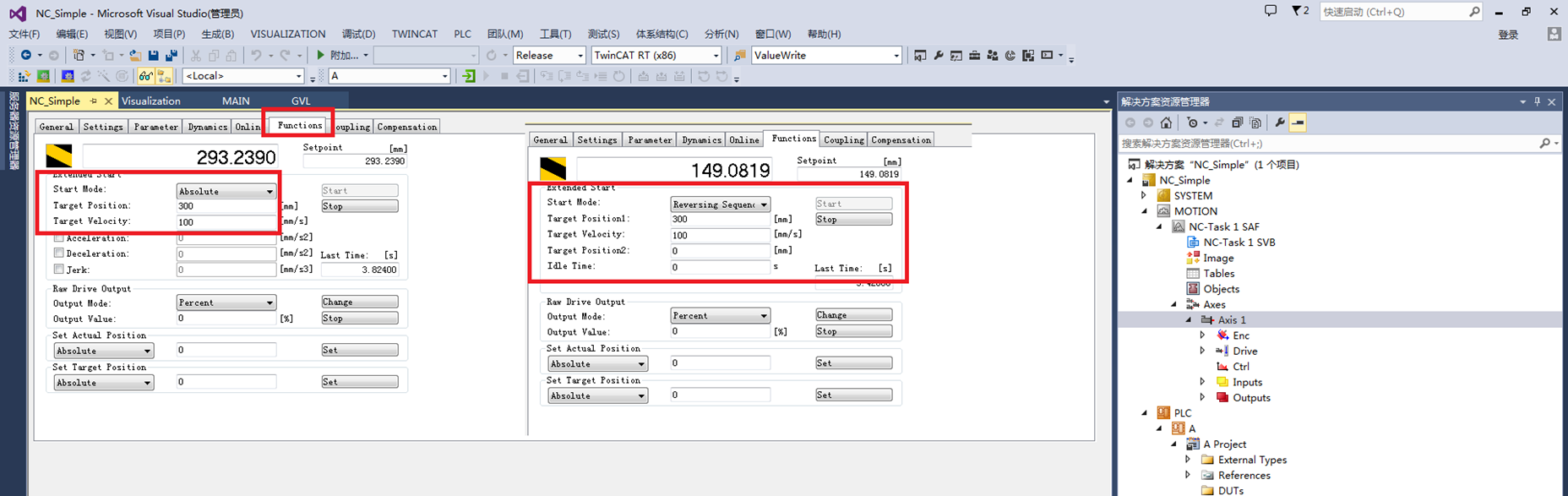
可以在Function中测试绝对运动,相对运动,往复两点等
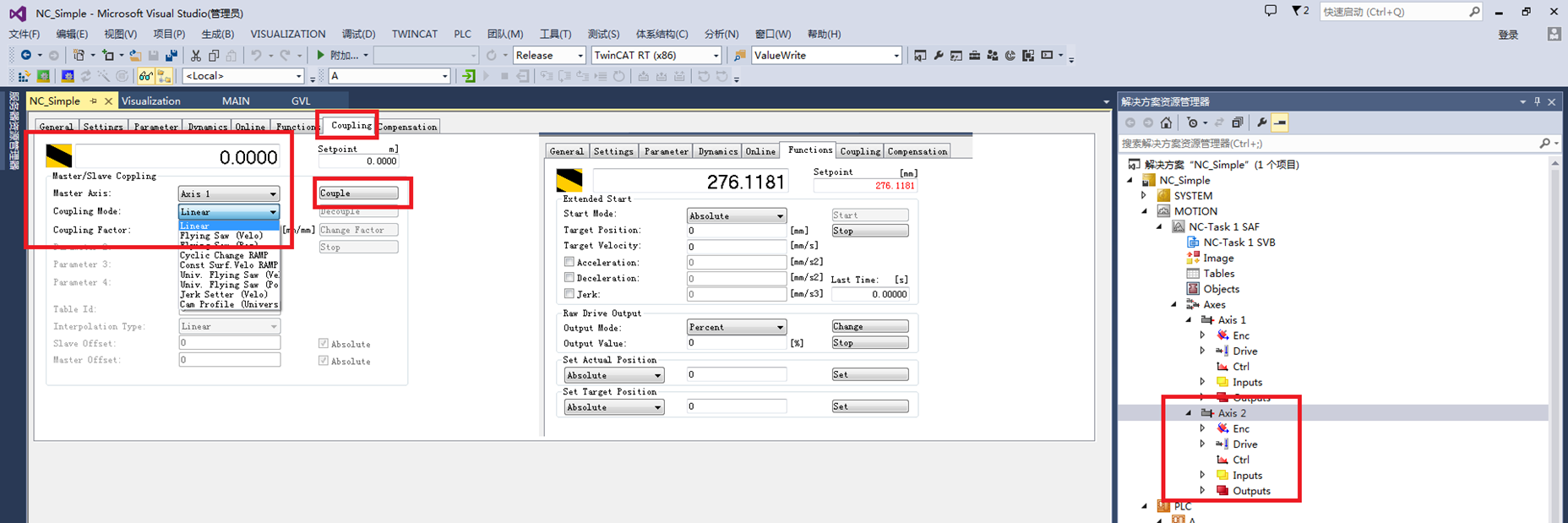
可以新建一个轴,并将轴设置为丛动轴(以一些贝福自带的从动方式跟随主动轴的运动),注意需要两个轴都手动Set-All上使能。但是这些功能都不太常用,所以只要了解即可。
更多教学视频和资料下载,欢迎关注以下信息:
我的优酷空间:
http://i.youku.com/acetaohai123

我的在线论坛:
http://csrobot.gz01.bdysite.com/

问题交流:
QQ:910358960
倍福TwinCAT(贝福Beckhoff)基础教程7.1 TwinCAT 如何简单执行NC功能块 TC3的更多相关文章
- 倍福TwinCAT(贝福Beckhoff)基础教程1.2 TwinCAT安装配置
由于TC2和TC3都有可能用到,个人推荐都安装,但是注意必须是先安装的TwinCAT2,然后安装TwinCAT3,如果反了可能两个都没法用(打开TcSwitchRuntime提示Both TwinCA ...
- 倍福TwinCAT(贝福Beckhoff)基础教程1.1 TwinCAT背景知识
本节附件中有很多PPT介绍贝福TwinCAT和EtherCAT的相关技术,在此只做简单说明. 简单总结:EtherCAT就是一种总线技术,具有速度快,稳定性高,布线简单等优点,详细可以参考下面这个PP ...
- 倍福TwinCAT(贝福Beckhoff)基础教程6.1 TwinCAT如何与高级语言通讯
因为使用TwinCAT的人用途不同,重视点就不同.如果用来代替传统PLC+HMI做项目的,很少会需要用到跟高级语言通讯,但是如果是用来做运动控制平台如做机器人运动控制器的,就肯定会用到.不管是否用得上 ...
- 倍福TwinCAT(贝福Beckhoff)基础教程5.1 TwinCAT如何执行系统命令
TwinCAT提供了一系列的执行Windows系统命令的方法 Name 描述 NT_Shutdown 关机操作系统 NT_AbortShutdown 取消关机操作系统命令 NT_Reboot 重启操作 ...
- 倍福TwinCAT(贝福Beckhoff)基础教程4.1 TwinCAT如何读写TXT文件
TwinCAT提供了FB_FileRead等一系列读写文件的方法,本小程序演示的是多个贝福自带的FBD功能块连起来用的方法,跟前面讲的一样,建议在初始化的时候把所有FBD都复位,准备使用 真正的读 ...
- 倍福TwinCAT(贝福Beckhoff)基础教程4.2 TwinCAT如何读写CSV文件
本程序只是在官方范例程序上稍作修改,在官方原有的范例中,演示了多种模式的读写(可以认为CSV文件是比TXT文件需要更多数据量的时候使用,比如记录一个小型的数据库集合) 但是写的比较混乱,甚至没有H ...
- 倍福TwinCAT(贝福Beckhoff)基础教程2.2 TwinCAT常见类型使用和转换_字符串
一般声明字符串都会加一个长度的限制,比如A:STRING(80);至于真实的字符串长度不要超过这个限制即可 在测试中,我演示了两个字符串的方法,CONCAT字符串拼接和REPLACE字符串替换.拼 ...
- 倍福TwinCAT(贝福Beckhoff)基础教程7.1 TwinCAT如何简单执行NC功能块 TC2
TC2的程序是在TC3的基础上稍作调整,只说明不同点,请先看TC3的. TC2中的一个原本是AXIS_REF类型变量被拆成了两个(PLCTONC_AXLESTRUCT和NCTOPLC_AXLESTRU ...
- 倍福TwinCAT(贝福Beckhoff)基础教程3.1 TwinCAT如何编写简单的计算器
把编写简单计算器作为入门的第一个范例程序,主要是因为比较简单,而且综合了HMI,数据类型,数据转换,PRG和FBD等功能块的混合等知识,个人认为还是比较适合用来快速上手的.由于是第一个范例,所以视频教 ...
随机推荐
- [ Python - 8 ] 简单demo练习
练习1: 利用os模块编写一个能实现dir -l输出的程序(注意:dir /l是windows下命令) #!_*_coding:utf-8_*_ # Author: hkey import os, t ...
- 【SQL】多个表的查询
1.元组变量 SELECT * FROM a AS x, a AS y; 结果是显示自己和自己的笛卡尔乘积. 如果查询中对于某一个关系使用了多次,为了区别他们的属性,需要对关系定义别名,然后用 别名. ...
- Selenium2+python自动化52-unittest执行顺序【转载】
前言 很多初学者在使用unittest框架时候,不清楚用例的执行顺序到底是怎样的.对测试类里面的类和方法分不清楚,不知道什么时候执行,什么时候不执行. 本篇通过最简单案例详细讲解unittest执行顺 ...
- Redis-4.0.8 readme.md
This README is just a fast *quick start* document. You can find more detailed documentation at [redi ...
- React Native - 2 控件Flexbox
*强烈建议使用Genymotion模拟器,比AVD速度快,功能强大. 1. flexDirection Flexbox是连续布局,它有主轴(primary axis)和交叉轴(cross axis ...
- [ThinkPHP] 从一个表中获得栏目对应的ID,从另一个表获得属于这些栏目的文章
public function index(){ $cate = 1; $query = M('Cate')->field('id')->where(array('id'=>$cat ...
- 洛谷 P3397 地毯 【二维差分标记】
题目背景 此题约为NOIP提高组Day2T1难度. 题目描述 在n*n的格子上有m个地毯. 给出这些地毯的信息,问每个点被多少个地毯覆盖. 输入输出格式 输入格式: 第一行,两个正整数n.m.意义如题 ...
- CF988 D. Points and Powers of Two【hash/数学推理】
[链接]:CF [题意]:从一堆数中选一个最大子集,使得任意两个数相减的绝对值都是2的幂. [分析]:首先很难的一点,需要想到子集最多只能有三个,四个及以上的子集一定不存在(可以证明).当有三个元素时 ...
- Spfa+DP【p2149】[SDOI2009]Elaxia的路线
Description 最近,Elaxia和w**的关系特别好,他们很想整天在一起,但是大学的学习太紧张了,他们 必须合理地安排两个人在一起的时间. Elaxia和w**每天都要奔波于宿舍和实验室之间 ...
- Codechef ForbiddenSum
Mike likes to invent new functions. The latest one he has invented is called ForbiddenSum. Let's con ...