SLAM到底是什么?一文带你读懂SLAM
SLAM是Simultaneous localization and mapping缩写,意为“同步定位与建图”,主要用于解决机器人在未知环境运动时的定位与地图构建问题,为了让大家更多的了解SLAM,以下将从SLAM的应用领域、SLAM框架、SLAM分类(基于传感器的SLAM分类)来进行全面阐述,本文仅对没有接触过SLAM的新人进行的科普。
一、SLAM的典型应用领域
机器人定位导航领域:地图建模。SLAM可以辅助机器人执行路径规划、自主探索、导航等任务。国内的科沃斯、塔米以及最新面世的岚豹扫地机器人都可以通过用SLAM算法结合激光雷达或者摄像头的方法,让扫地机高效绘制室内地图,智能分析和规划扫地环境,从而成功让自己步入了智能导航的阵列。国内思岚科技(SLAMTEC)为这方面技术的主要提供商,SLAMTEC的命名就是取自SLAM的谐音,其主要业务就是研究服务机器人自主定位导航的解决方案。目前思岚科技已经让关键的二维激光雷达部件售价降至百元,这在一定程度上无疑进一步拓展了SLAM技术的应用前景。
VR/AR方面:辅助增强视觉效果。SLAM技术能够构建视觉效果更为真实的地图,从而针对当前视角渲染虚拟物体的叠加效果,使之更真实没有违和感。VR/AR代表性产品中微软Hololens、谷歌ProjectTango以及MagicLeap都应用了SLAM作为视觉增强手段。

无人机领域:地图建模。SLAM可以快速构建局部3D地图,并与地理信息系统(GIS)、视觉对象识别技术相结合,可以辅助无人机识别路障并自动避障规划路径,曾经刷爆美国朋友圈的Hovercamera无人机,就应用到了SLAM技术。

无人驾驶领域:视觉里程计。SLAM技术可以提供视觉里程计功能,并与GPS等其他定位方式相融合,从而满足无人驾驶精准定位的需求。例如,应用了基于激光雷达技术Google无人驾驶车以及牛津大学MobileRoboticsGroup11年改装的无人驾驶汽车野猫(Wildcat)均已成功路测。

二、SLAM框架
SLAM系统框架如图所示,一般分为五个模块,包括传感器数据、视觉里程计、后端、建图及回环检测。
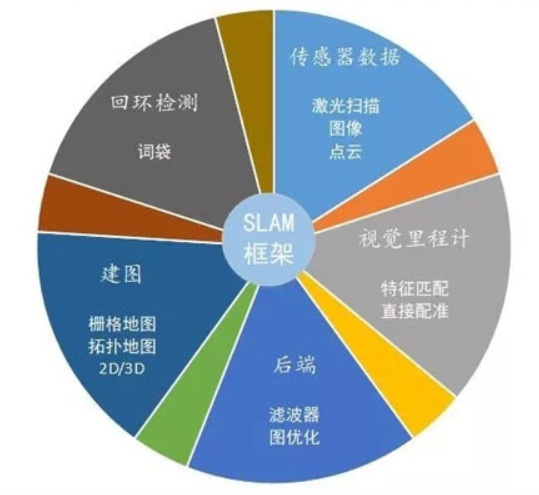
传感器数据:主要用于采集实际环境中的各类型原始数据。包括激光扫描数据、视频图像数据、点云数据等。
视觉里程计:主要用于不同时刻间移动目标相对位置的估算。包括特征匹配、直接配准等算法的应用。
后端:主要用于优化视觉里程计带来的累计误差。包括滤波器、图优化等算法应用。
建图:用于三维地图构建。
回环检测:主要用于空间累积误差消除
其工作流程大致为:
传感器读取数据后,视觉里程计估计两个时刻的相对运动(Ego-motion),后端处理视觉里程计估计结果的累积误差,建图则根据前端与后端得到的运动轨迹来建立地图,回环检测考虑了同一场景不同时刻的图像,提供了空间上约束来消除累积误差。
三、SLAM分类(基于传感器的SLAM分类)
目前用在SLAM上的传感器主要分为这两类,一种是基于激光雷达的激光SLAM(Lidar SLAM)和基于视觉的VSLAM(Visual SLAM)。
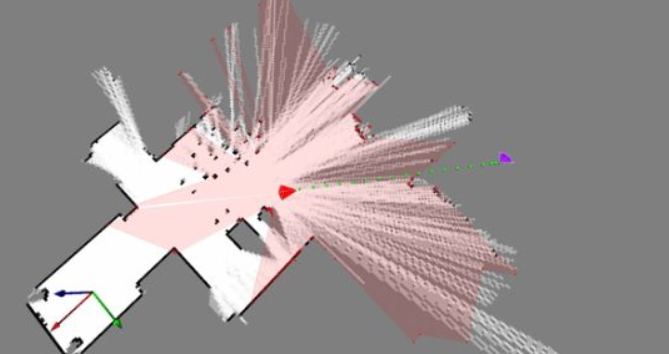
1.激光SLAM
激光SLAM采用2D或3D激光雷达(也叫单线或多线激光雷达),2D激光雷达一般用于室内机器人上(如扫地机器人),而3D激光雷达一般使用于无人驾驶领域。激光雷达的出现和普及使得测量更快更准,信息更丰富。激光雷达采集到的物体信息呈现出一系列分散的、具有准确角度和距离信息的点,被称为点云。通常,激光SLAM系统通过对不同时刻两片点云的匹配与比对,计算激光雷达相对运动的距离和姿态的改变,也就完成了对机器人自身的定位。
激光雷达测距比较准确,误差模型简单,在强光直射以外的环境中运行稳定,点云的处理也比较容易。同时,点云信息本身包含直接的几何关系,使得机器人的路径规划和导航变得直观。激光SLAM理论研究也相对成熟,落地产品更丰富。
2.视觉SLAM
眼睛是人类获取外界信息的主要来源。视觉SLAM也具有类似特点,它可以从环境中获取海量的、富于冗余的纹理信息,拥有超强的场景辨识能力。早期的视觉SLAM基于滤波理论,其非线性的误差模型和巨大的计算量成为了它实用落地的障碍。近年来,随着具有稀疏性的非线性优化理论(Bundle Adjustment)以及相机技术、计算性能的进步,实时运行的视觉SLAM已经不再是梦想。
视觉SLAM的优点是它所利用的丰富纹理信息。例如两块尺寸相同内容却不同的广告牌,基于点云的激光SLAM算法无法区别他们,而视觉则可以轻易分辨。这带来了重定位、场景分类上无可比拟的巨大优势。同时,视觉信息可以较为容易的被用来跟踪和预测场景中的动态目标,如行人、车辆等,对于在复杂动态场景中的应用这是至关重要的。
通过对比我们发现,激光SLAM和视觉SLAM各擅胜场,单独使用都有其局限性,而融合使用则可能具有巨大的取长补短的潜力。例如,视觉在纹理丰富的动态环境中稳定工作,并能为激光SLAM提供非常准确的点云匹配,而激光雷达提供的精确方向和距离信息在正确匹配的点云上会发挥更大的威力。而在光照严重不足或纹理缺失的环境中,激光SLAM的定位工作使得视觉可以借助不多的信息进行场景记录。
近年来,SLAM导航技术已取得了很大的发展,它将赋予机器人和其他智能体前所未有的行动能力,而激光SLAM与视觉SLAM必将在相互竞争和融合中发展,使机器人从实验室和展厅中走出来,做到真正的服务于人类。
SLAM到底是什么?一文带你读懂SLAM的更多相关文章
- 一文带你读懂什么是vxlan网络
一个执着于技术的公众号 一.背景 随着云计算.虚拟化相关技术的发展,传统网络无法满足大规模.灵活性要求高的云数据中心的要求,于是便有了overlay网络的概念.overlay网络中被广泛应用的就是vx ...
- 一文带你读懂zookeeper在大数据生态的应用
一个执着于技术的公众号 一.简述 在一群动物掌管的世界中,动物没有人类聪明的思想,为了保持动物世界的生态平衡,这时,动物管理员-zookeeper诞生了. 打开Apache zookeeper的官网, ...
- 实战 | 一文带你读懂Nginx反向代理
一个执着于技术的公众号 前言 在前面的章节中,我们已经学习了nginx基础知识: 给小白的 Nginx 10分钟入门指南 Nginx编译安装及常用命令 完全卸载nginx的详细步骤 Nginx 配置文 ...
- 从源码入手,一文带你读懂Spring AOP面向切面编程
之前<零基础带你看Spring源码--IOC控制反转>详细讲了Spring容器的初始化和加载的原理,后面<你真的完全了解Java动态代理吗?看这篇就够了>介绍了下JDK的动态代 ...
- 【并发编程】一文带你读懂深入理解Java内存模型(面试必备)
并发编程这一块内容,是高级资深工程师必备知识点,25K起如果不懂并发编程,那基本到顶.但是并发编程内容庞杂,如何系统学习?本专题将会系统讲解并发编程的所有知识点,包括但不限于: 线程通信机制,深入JM ...
- 一文带你读懂 Mysql 和 InnoDB存储引擎
作为一名开发人员,在日常的工作中会难以避免地接触到数据库,无论是基于文件的 sqlite 还是工程上使用非常广泛的 MySQL.PostgreSQL,但是一直以来也没有对数据库有一个非常清晰并且成体系 ...
- 一文带你读懂什么是docker
一 简介 1.了解Docker的前生LXC LXC为Linux Container的简写.一种轻量级的内核虚拟化技术,隔离进程和资源. Linux Container有点像chroot,提供了一个拥有 ...
- 一文带你读懂!华为云在ACMUG技术沙龙上都透露了些啥?
摘要:近日,华为云数据库业务总裁苏光牛在ACMUG中国MySQL用户组主办的 "华为云专场" 技术沙龙中分享了华为云数据库重磅新品GaussDB的核心能力与竞争优势.那么, Gau ...
- 一文带你读懂 Hbase 的架构组成
hi,大家好,我是大D.今天咱们继续深挖一下 HBase 的架构组成. Hbase 作为 NoSQL 数据库的代表,属于三驾马车之一 BigTable 的对应实现,HBase 的出现很好地弥补了大数据 ...
随机推荐
- Hibernate 实体对象三种状态 :自由,持久,游离
实体对象的状态及转化: 有了上面关于Hibernate缓存的知识,我们再来介绍实体对象的状态就非常容易理解了. A:自由态对象: 当我们通过Java的new关键字来生成一个实体对象时,这时这个实体对象 ...
- 【bzoj2208】[Jsoi2010]连通数
2208: [Jsoi2010]连通数 Time Limit: 20 Sec Memory Limit: 512 MBSubmit: 2305 Solved: 989[Submit][Status ...
- SpringBoot23 分模块开发
1 开发环境说明 JDK:1.8 MAVEN:3.5 IDEA:2017.2.5 SpringBoot:2.0.3.RELEASE 2 创建SpringBoot项目 2.1 项目信息 2.2 添加项目 ...
- Docker学习笔记_网上资源参考
Docker学习,网上资源参考 1.菜鸟教程: http://www.runoob.com ...
- SQL 数据库 学习 002 如何启动 SQL Server 软件
如何启动 SQL Server 软件 我的电脑系统: Windows 10 64位 使用的SQL Server软件: SQL Server 2014 Express 如果你还没有下载 SQL Serv ...
- 手机APP兼容性测试
兼容性测试方案 兼容性问题 屏幕分辨率兼容性问题 软件(iOS和Android系统版本及不同厂家的定制ROM)兼容性问题 硬件(不同的CPU.内存大小等等)兼容性问题 网络(2G/3G/4G/WIFI ...
- css总结18:HTML 表单和inut各个常用标签
1 HTML 表单和输入 1.1 HTML 表单介绍 表单是一个包含表单元素的区域. 表单元素是允许用户在表单中输入内容,比如:文本域(textarea).下拉列表.单选框(radio-buttons ...
- 二度xml<一>
又一次学习Xml,之前差不多都忘了,为了下半年的面试,为了工作重头来过....... 其实我觉得直接上代码来的更实际点,理论的东西,我们随便找点书看看就行. 下面的代码是为了打印出一个xml文件 xm ...
- Java 之集合框架
- 编写高质量代码改善C#程序的157个建议——建议12: 重写Equals时也要重写GetHashCode
建议12: 重写Equals时也要重写GetHashCode 除非考虑到自定义类型会被用作基于散列的集合的键值:否则,不建议重写Equals方法,因为这会带来一系列的问题. 如果编译上一个建议中的Pe ...