编写第一个ROS(创建工作空间workspace和功能包package)
刚接触ROS,学着写了第一个程序,怕以后忘记,就将其步骤记录下来。。
首先你必须保证你电脑已安装配置好ROS。
1.创建工作空间(workspace)
我们所创建功能包package,应该全部放到一个叫做工作空间(workspace)的目录中 。你可以把目录存储在你账号的任何位置例如,我所创建的工作空间的是路径/home,同时你可以用任何你喜欢的名字命名你的工作空间,我的工作空间名为 test,现在请使用标准的mkdir命令行去创建一个工作空间。我首先建立一个工作空间,名字为test,
此处创建的工作空间还需要在工作区目录中创建一个叫做 src 的子目录。这个子目录将用于存放功能包的源代码。而 代码中的 “-p” ,这时mkdir命令会自动创建所有不存在的目录。
在终端命令中键入(打开终端的快捷键为“Ctrl+Alt+T”)
mkdir -p ~/test/src
运行后你会发现你名为test的工作空间中已经有了一个src 的子目录。这样你的工作空间建立已经完成。
2.创建功能包(package)
创建一个新ROS功能包的命令应该在你工作空间中的src目录下运行:catkin_create_pkg package-name,package-name指的是你功能包的名字,我所创建的功能包名为amin,注意是在你工作空间中的src目录下运行(cd命令可以进入你要进入的目录)继续在终端中键入
cd ~/test/src
进入src目录下运行
catkin_create_pkg amin
其实,这个功能包创建命令没有做太多工作,它只不过创建了一个存放这个功能包的目录(也就是我所创建的功能包amin),并在amin那个目录下生成了两个配置文件。
第一个配置文件,叫做 package.xml,称为清单文件。
第二个文件,叫做 CMakeLists.txt,是一个 Cmake 的脚本文件,Cmake 是一个符合工业标准的跨平台编译系统。这个文件包含了一系列的编译指令,包括应该生成哪种可执行文件,需要哪些源文件,以及在哪里可以找到所需的头文件和链接库。当然,这个文件表明 catkin 在内部使用了 Cmake。
注意:ROS 包的命名遵循一个命名规范,只允许使用小写字母、数字和下划线,而且首字符必须是一个小写字母。一些 ROS工具,包括 catkin,不支持那些不遵循此命名规范的包。
可以不看此处:编辑清单文件 创建包后,你可能希望编辑其 package.xml 文件,其中包含一些描述这个包的元数据。通过 catkin_create_pkg 创建的功能包默认含有很丰富的注释,对于读者在很大程度上是不言自明的。然而,请注意,无论是在编译时还是在运行时,其中的大部分信息 ROS 并没有使用,这些信息只有在你公开发布代码时才变得重要。本着保持文档与实际功能同步的精神,至少填写description 和 maintainer 两部分可能是比较合理的。
3.编写ROS程序
我编写一个简单的 hello,ros!的程序,命名为hello.cpp。这个名为 hello.cpp 的源文件 也 存 放 在 你 的 功 能 包 amin文 件 夹 中 , 挨 着 package.xml 和CMakeLists.txt。
注意:一些在线教程建议在你的功能包目录中创建 src 目录来存放 C ++源文件。这个附加的组织结构可能是有益的,特别是对于那些含有多种类型文件的较大的功能包,但它不是严格必要的。
#include <ros/ros.h> int main ( int argc , char ** argv )
{
ros::init ( argc , argv , "hello" ) ;
ros::NodeHandle nh ;
ROS_INFO_STREAM( " Hello , ROS! " ) ;
}
4.编译 Hello 程序
我们该如何编译和运行这个程序呢?这些交给ROS的catkin编译系统来处理。
第一步:声明依赖库
首先,我们需要声明程序所依赖的其他功能包。对于 c++程序而言,此步骤是必要的,以确保 catkin 能够向 c++编译器提供合适的标记来定位编译功能包所需的头文件和链接库。为了给出依赖库,
编辑包目录下的 CMakeLists.txt 文件。
该文件的默认版本含有如下行:find_package(catkin REQUIRED)
所依赖的其他 catkin 包可以添加到这一行的 COMPONENTS 关键字后面,如下所示:find_package(catkin REQUIRED COMPONENTS package-names)
对于 hello 例程,我们需要添加名为 roscpp 的依赖库,它提供了 ROS 的 C++客户端库。因此,修改后的 find_package 行如下:
find_package(catkin REQUIRED COMPONENTS roscpp)
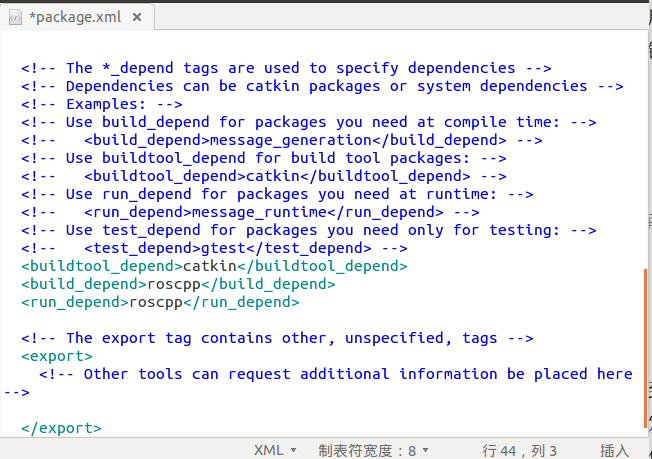
我们同样需要在包的清单文件package.xml 中列出依赖库,通过使用build_depend (编译依赖)和 run_depend(运行依赖)两个关键字实现:格式如下:
<build_depend>package-name</build_depend>
<run_depend>package-name</run_depend>
在hello 程序在编译时和运行时都需要 roscpp 库,因此清单文件package.xml加入:
<build_depend>roscpp</build_depend>
<run_depend>roscpp</run_depend>
package.xml的打开方式用gedit打开如图:
注意:然而,在清单文件中声明的依赖库并没有在编译过程中用到;如果你在此处忽略它们,你可能不会看到任何错误消息,直到发布你的包给其他人,他们可能在没有安装所需包的情况下编译你发布的包而导致报错。
第二步:声明可执行文件
接下来,我们需要在 CMakeLists.txt 中添加两行,来声明我们需要创建的可执行文件。
其一般形式是:add_executable(executable-name source-files) 此处executable-name为执行文件的名字(hello),source-files为源文件的名字(hello.cpp)
target_link_libraries(executable-name ${catkin_LIBRARIES})
第一行声明了我们想要的可执行文件的文件名,以及生成此可执行文件所需的源文件列表。如果你有多个源文件,把它们列在此处,并用空格将其区分开。
第二行告诉 Cmake 当链接此可执行文件时需要链接哪些库(在上面的 find_package 中定义)。如果你的包中包括多个可执行文件,为每一个可执行文件复制和修改上述两行代码。
在我的例程中,我们需要一个名为 hello 的可执行文件,它通过名为 hello.cpp 的源文件编译而来。所以我们需要添加如下几行代码到 CMakeLists.txt 中:
add_executable(hello hello.cpp)
target_link_libraries(hello ${catkin_LIBRARIES})
第三步:编译工作区
利用catkin_make这个命令进行编译,注意必须从你的工作空间目录运行,此命令时是进入你的工作空间目录。
cd ~/test
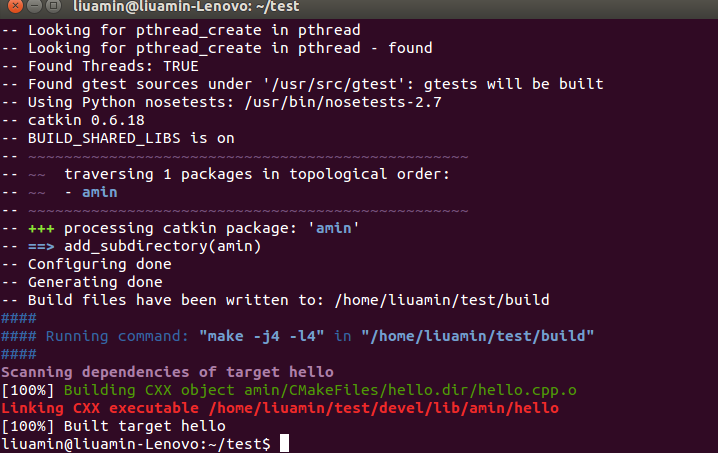
catkin_make这个命令它将会完成一些配置步骤(尤其是你第一次运行此命令时),并且在你的工作区中创建 devel 和 build 两个子目录。这两个新目录用于存放和编译相关的文件,例如自动生成的编译脚本、目标代码和可执行文件。如果你喜欢,当完成功能包的相关工作后(译者注:即完成了编写、调试、测试等一系列工作后,此时代码基本定型),可以放心地删除 devel 和 build两个子目录。
catkin_make
运行完后你的工作空间目录里多了devel 和 build 两个子目录。如图为运行出来结果。
当然,有可能如 果 你 看 到 来 自 catkin_make 的编译 错 误 , 提 示 无 法 找 到ros/ros.h 头文件,或者 ros::init 等 ROS 函数未定义的错误,你会在执行此步骤时看见它们。最大的可能性是你的 CMakeLists.txt 没有正确声明对 roscpp的依赖。
在更正它们以后,你可以重新运行 catkin_make 来完成编译工作。
5.执行hello程序
首先要启动 roscore:这个程序是一个节点,节点需要一个节点管理器才可以正常运行。启动节点管理器的命令:
roscore
启动完节点管理器后,执行名为 setup.bash 的脚本文件,它是 catkin_make 在你工作区的 devel 子目录下生成的。
这个自动生成的脚本文件设置了若干环境变量,从而使 ROS 能够找到你创建的功能包和新生成的可执行文件。(也就是将程序注册)
注意:除非目录结构发生变化,否则你只需要在每个终端执行此命令一次,即使你修改了代码并且用 catkin_make 执行了重编译。
注意:此命令必须在你的工作空间目录运行,进入你的工作空间目录的命令上文提到过“cd ~/test”,否则会出现“没有那个文件或目录”
source devel/setup.bash
最后一步,运行节点,用命令:使用格式为"rosrun package-name executable-name" package-name 为功能包名称, executable-name为可执行文件名称
rosrun amin hello
运行结果如图:
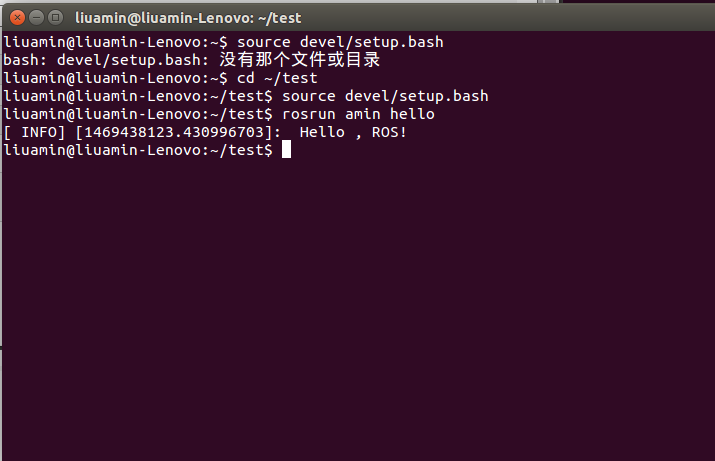
这样一个简单的ROS程序就完成了。。
当然网上也有官方的教程,有点不一样,我觉得这篇很有用,也成功的运行了。这里有官方教程的一个简化版,很有必要看下:http://blog.csdn.net/yake827/article/details/44564057
编写第一个ROS(创建工作空间workspace和功能包package)的更多相关文章
- (转)-编写第一个ROS(创建工作空间workspace和功能包package)
原文网址:http://www.cnblogs.com/liuamin/p/5704281.html 刚接触ROS,学着写了第一个程序,怕以后忘记,就将其步骤记录下来.. 首先你必须保证你电脑已安装配 ...
- ROS知识(3)----功能包package编译的两种方式
ROS的包编译有两种方法(我知道的),一种是用rosmake,这种方法简单:另一种是用catkin_make,这种方法更方便包的管理和开发.这两种方法都是先建立工作空间workspace(类似于vs下 ...
- ROS学习笔记三:编写第一个ROS节点程序
在编写第一个ROS节点程序之前需要创建工作空间(workspace)和功能包(package). 1 创建工作空间(workspace) 创建一个catkin_ws: #注意:如果使用sudo一次 ...
- ROS创建工作空间(三)
查看正在使用的ROS工作空间,使用命令 echo $ROS_PACKAGE_PATH 我新建了两个
- ROS创建工作空间
1.$mkdir catkin_ws && cd catkin_ws && mkdir src 2.$catkin_make (#这一句是完成编译初始化,注意括号内 ...
- 4.1 ROS元功能包
4.1 ROS元功能包 场景:完成ROS中一个系统性的功能,可能涉及到多个功能包,比如实现了机器人导航模块,该模块下有地图.定位.路径规划...等不同的子级功能包.那么调用者安装该模块时,需要逐一的安 ...
- 创建一个ROS工作空间(ROS Workspace)
详细参照 http://wiki.ros.org/ROS/Tutorials/InstallingandConfiguringROSEnvironment1.mkdir -p ~/catkin_ws/ ...
- 创建一个ROS包
先前笔者不知道catkin到底是个什么东东,后来终于在官方网站上找到了答案,原来catkin是ROS的一个官方的编译构建系统,是原本的ROS的编译构建系统rosbuild的后继者.catkin的来源有 ...
- 【探索之路】机器人篇(2)-ROS系统并创建工作空间和项目
在ROS官网,已经给出了详细的教程.下面我就般一下砖,把相应的操作写到这里.官方网址:http://wiki.ros.org/cn/ 安装ROS系统 indigo在ubuntu上的安装教程.官网:ht ...
随机推荐
- AJAX实现无刷新验证用户名
register.php <html> <head> <meta http-equiv="content-type" content="te ...
- VS2012下基于Glut 矩阵变换示例程序2:
在VS2012下基于Glut 矩阵变换示例程序:中我们在绘制甜圈或者圆柱时使用矩阵对相应的坐标进行变换后自己绘制甜圈或者圆柱.我们也可以使用glLoadMatrixf.glLoadMatrixd载入变 ...
- Linux进程分配内存的两种方式--brk() 和mmap()
如何查看进程发生缺页中断的次数? 用ps -o majflt,minflt -C program命令查看. majflt代表major fault,中文名叫大错误,minflt代表minor faul ...
- 使用unity创建塔防游戏(原译)(part1)
塔防游戏非常地受欢迎,木有什么能比看着自己的防御毁灭邪恶的入侵者更爽的事了. 在这个包含两部分的教程中,你将使用Unity创建一个塔防游戏. 你将会学到如何: 创建一波一波的敌人 使敌人随着路标移动 ...
- windows下使用命令查看端口占用情况
使用下面的命令查看端口占用情况: 比如查看3000端口的占用情况 netstat -ano|findstr 3000 运行后,结果如下: 可以看到进程号为9692的占用了该端口,使用下面的命令查看是哪 ...
- express框架+jade+bootstrap+mysql开发用户注册登录项目
完整的项目代码(github):https://github.com/suqinhui/express-demo express是基于Node.js平台的web应用开发框架,用express框架开发w ...
- Nopcommerce架构浅谈之架构层次
前面谈到了系统的文件,从文件结构中我们也可以看出Nop的层次划分还是非常清晰,下面我将介绍下Nop的架构层次,并对每个层做简要的介绍,先看我画的层次图. 这个系统基本上按照了ddd的形式做了划分,我本 ...
- JQuery动态操作表格
新人,小白一枚,刚刚参加工作,所以会在这里记录一些遇到的问题. 最近要做的东西,是对一个表格动态的添加行,删除行,并且对表格中内容进行非空验证. <!DOCTYPE html> <h ...
- Xcode8出现AQDefaultDevice (173): skipping input stream 0 0 0x0
一直不想升级Xcode,但是没办法项目进度只能升级Xcode8,果然不出所料出现了不少bug, Xcode7运行一直没有问题,但是在Xcode8上一直输出AQDefaultDevice (173): ...
- Android之WebView网页滚动截图
WebView 网页滚动截屏,可对整个网页进行截屏而不是仅当前屏幕哦! 注意若Web页面存在position:fixed; 的话得在调用前设置为 position:absolute; 哦,否则会出现很 ...