七中滤波方法测试matlab实现
http://blog.163.com/xiaheng0804@126/blog/static/1205282120132129471816/
创建两个混合信号,便于更好测试滤波器效果。同时用七中滤波方法测试。
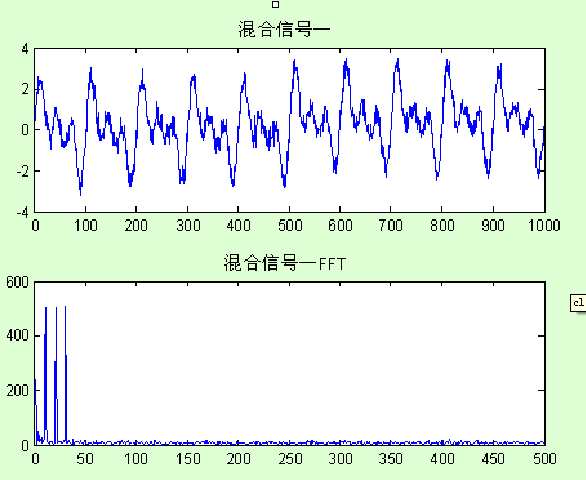
混合信号Mix_Signal_1 = 信号Signal_Original_1+白噪声。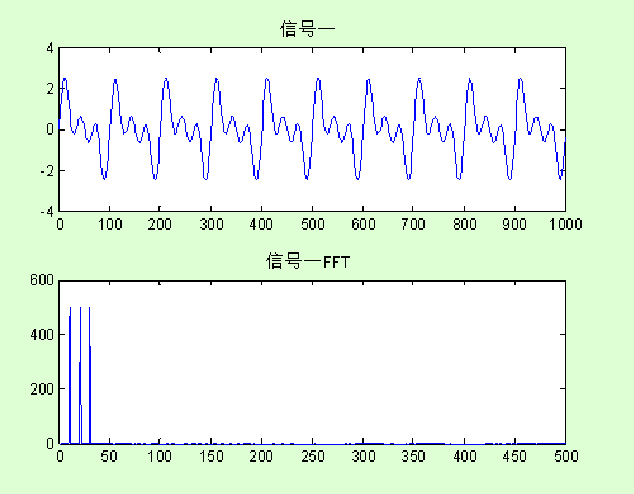
混合信号Mix_Signal_2 = 信号Signal_Original_2+白噪声。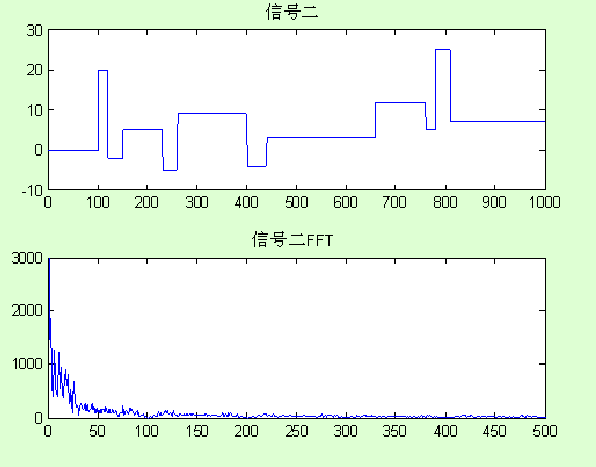

1.巴特沃斯低通滤波器去噪
巴特沃斯滤波器适合用于信号和噪声没有重叠的情况下。下图是巴特沃斯对两个信号的滤波效果。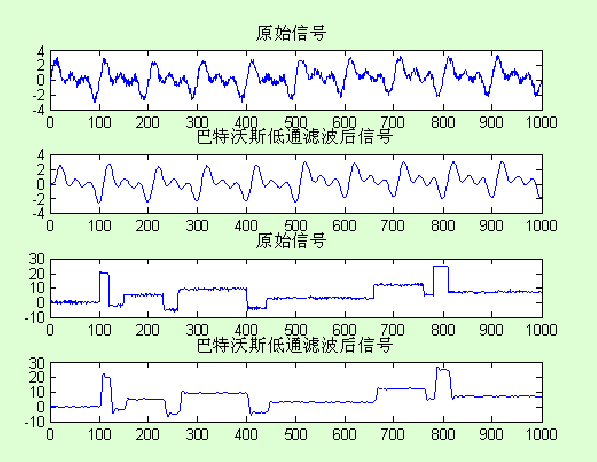
从图上可以看出巴特沃斯低通滤波器对信号一的滤波效果还是可以的,主要是因为有效的信号最高频率才30Hz,本程序将50Hz以上的信号全部滤除,通过的频率成分中仍然是有白噪声的。
对于信号二,滤波后的信号与没有加噪声的信号相比就有失真了,上升沿和下降沿的高频信号被滤除了。
2.FIR低通滤波器去噪
情况同巴特沃斯低通滤波器相似。滤波后的效果如下: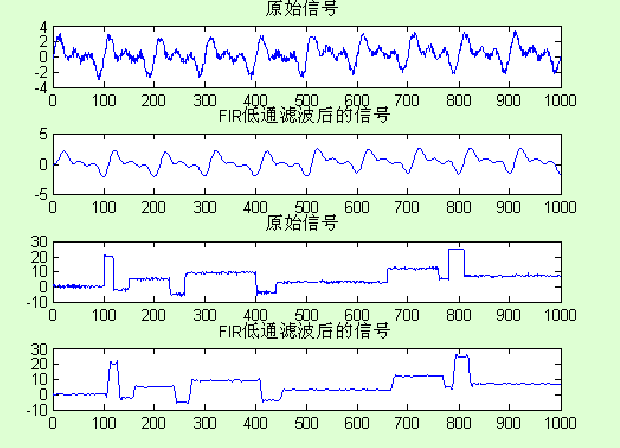
3. 移动平均滤波去噪
滤波效果如下: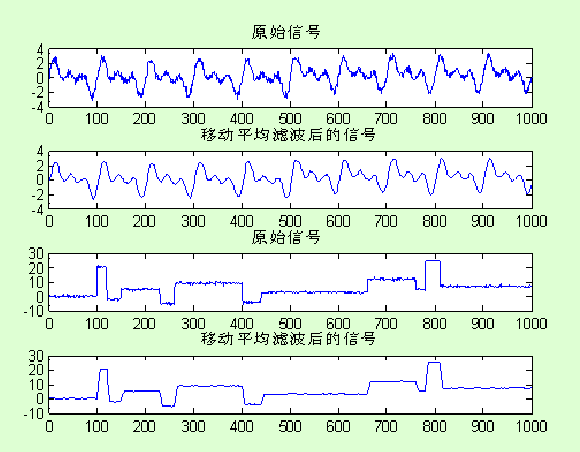
4. 中值滤波去噪
从上图可以看出,无论是对信号一还是对信号二,中值滤波的滤波效果都是很不错,特备是对于信号二,上升沿和下降失真比较的小。5. 维纳滤波去噪
维纳滤波器属于现代滤波器,传统的滤波器只能滤除信号和干扰频带没有重叠的情况,当信号和干扰频带有重叠的时候传统滤波器将无能为力,这时就需要用到现代滤波器,现代滤波器利用信号和干扰的统计特征(如自相关函数、功率谱等)导出一套最佳估值算法,然后用硬件或软件予以实现。
维纳滤波是以均方误差最小(LMS(Least MeanSquare)为准则的,它根据过去观测值和当前观测值来估计信号的当前值,因此它的解形式是系统的传递函数或单位脉冲响应。
均方误差为:
维纳-霍夫(Wiener-Hopf)方程最小均方误差下的解为: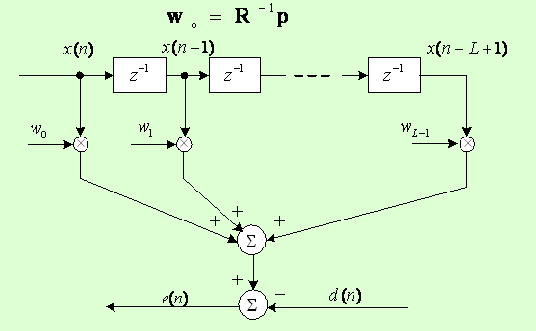
由于理解不深,对于信号二,没有什么滤波效果
6. 自适应滤波去噪
维纳滤波器参数是固定的,适合于平稳随机信号。卡尔曼滤波器参数是时变的,适合于非平稳随机信号。然而,只有在信号和噪声的统计特性先验已知的情况下,这两种滤波技术才能获得最优滤波。在实际应用中,常常无法得到信号和噪声统计特性的先验知识。在这种情况下,自适应滤波技术能够获得极佳的滤波性能,因而具有很好的应用价值。
自适应滤波的滤波效果如下: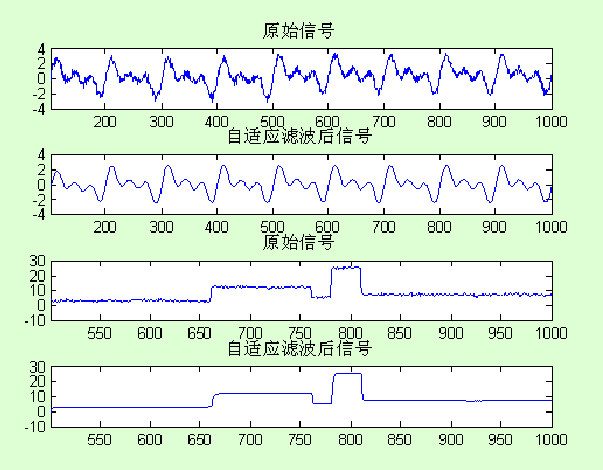
本程序是基于LMS算法的自适应滤波,从上图可以看出,滤波效果也是很不错的,特别是对于信号二,上升沿有失真,下降沿保持还可以,最要的是得到的波形十分的平滑。由此可见自适应滤波极具使用价值。7. 小波去噪
首先看一下小波的去噪效果。
对于信号二,小波的去噪效果非常不错,虽然得到波形不是很平滑,但是上升沿和下降沿保持的非常高,基本可以看到棱角.
%****************************************************************************************
%
% 创建两个信号Mix_Signal_1 和信号 Mix_Signal_2
%
%***************************************************************************************
Fs = 1000; %采样率
N = 1000; %采样点数
n = 0:N-1;
t = 0:1/Fs:1-1/Fs; %时间序列
Signal_Original_1 =sin(2*pi*10*t)+sin(2*pi*20*t)+sin(2*pi*30*t);
Noise_White_1 = [0.3*randn(1,500), rand(1,500)]; %前500点高斯分部白噪声,后500点均匀分布白噪声
Mix_Signal_1 = Signal_Original_1 + Noise_White_1; %构造的混合信号
Signal_Original_2 = [zeros(1,100), 20*ones(1,20), -2*ones(1,30), 5*ones(1,80), -5*ones(1,30), 9*ones(1,140), -4*ones(1,40), 3*ones(1,220), 12*ones(1,100), 5*ones(1,20), 25*ones(1,30), 7 *ones(1,190)];
Noise_White_2 = 0.5*randn(1,1000); %高斯白噪声
Mix_Signal_2 = Signal_Original_2 + Noise_White_2; %构造的混合信号
%****************************************************************************************
%
% 信号Mix_Signal_1 和 Mix_Signal_2 分别作巴特沃斯低通滤波。
%
%***************************************************************************************
%混合信号 Mix_Signal_1 巴特沃斯低通滤波
figure(1);
Wc=2*50/Fs; %截止频率 50Hz
[b,a]=butter(4,Wc);
Signal_Filter=filter(b,a,Mix_Signal_1);
subplot(4,1,1); %Mix_Signal_1 原始信号
plot(Mix_Signal_1);
axis([0,1000,-4,4]);
title('原始信号 ');
subplot(4,1,2); %Mix_Signal_1 低通滤波滤波后信号
plot(Signal_Filter);
axis([0,1000,-4,4]);
title('巴特沃斯低通滤波后信号');
%混合信号 Mix_Signal_2 巴特沃斯低通滤波
Wc=2*100/Fs; %截止频率 100Hz
[b,a]=butter(4,Wc);
Signal_Filter=filter(b,a,Mix_Signal_2);
subplot(4,1,3); %Mix_Signal_2 原始信号
plot(Mix_Signal_2);
axis([0,1000,-10,30]);
title('原始信号 ');
subplot(4,1,4); %Mix_Signal_2 低通滤波滤波后信号
plot(Signal_Filter);
axis([0,1000,-10,30]);
title('巴特沃斯低通滤波后信号');
%****************************************************************************************
%
% 信号Mix_Signal_1 和 Mix_Signal_2 分别作FIR低通滤波。
%
%***************************************************************************************
%混合信号 Mix_Signal_1 FIR低通滤波
figure(2);
F = [0:0.05:0.95];
A = [1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0] ;
b = firls(20,F,A);
Signal_Filter = filter(b,1,Mix_Signal_1);
subplot(4,1,1); %Mix_Signal_1 原始信号
plot(Mix_Signal_1);
axis([0,1000,-4,4]);
title('原始信号 ');
subplot(4,1,2); %Mix_Signal_1 FIR低通滤波滤波后信号
plot(Signal_Filter);
axis([0,1000,-5,5]);
title('FIR低通滤波后的信号');
%混合信号 Mix_Signal_2 FIR低通滤波
F = [0:0.05:0.95];
A = [1 1 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0] ;
b = firls(20,F,A);
Signal_Filter = filter(b,1,Mix_Signal_2);
subplot(4,1,3); %Mix_Signal_2 原始信号
plot(Mix_Signal_2);
axis([0,1000,-10,30]);
title('原始信号 ');
subplot(4,1,4); %Mix_Signal_2 FIR低通滤波滤波后信号
plot(Signal_Filter);
axis([0,1000,-10,30]);
title('FIR低通滤波后的信号');
%****************************************************************************************
%
% 信号Mix_Signal_1 和 Mix_Signal_2 分别作移动平均滤波
%
%***************************************************************************************
%混合信号 Mix_Signal_1 移动平均滤波
figure(3);
b = [1 1 1 1 1 1]/6;
Signal_Filter = filter(b,1,Mix_Signal_1);
subplot(4,1,1); %Mix_Signal_1 原始信号
plot(Mix_Signal_1);
axis([0,1000,-4,4]);
title('原始信号 ');
subplot(4,1,2); %Mix_Signal_1 移动平均滤波后信号
plot(Signal_Filter);
axis([0,1000,-4,4]);
title('移动平均滤波后的信号');
%混合信号 Mix_Signal_2 移动平均滤波
b = [1 1 1 1 1 1]/6;
Signal_Filter = filter(b,1,Mix_Signal_2);
subplot(4,1,3); %Mix_Signal_2 原始信号
plot(Mix_Signal_2);
axis([0,1000,-10,30]);
title('原始信号 ');
subplot(4,1,4); %Mix_Signal_2 移动平均滤波后信号
plot(Signal_Filter);
axis([0,1000,-10,30]);
title('移动平均滤波后的信号');
%****************************************************************************************
%
% 信号Mix_Signal_1 和 Mix_Signal_2 分别作中值滤波
%
%***************************************************************************************
%混合信号 Mix_Signal_1 中值滤波
figure(4);
Signal_Filter=medfilt1(Mix_Signal_1,10);
subplot(4,1,1); %Mix_Signal_1 原始信号
plot(Mix_Signal_1);
axis([0,1000,-5,5]);
title('原始信号 ');
subplot(4,1,2); %Mix_Signal_1 中值滤波后信号
plot(Signal_Filter);
axis([0,1000,-5,5]);
title('中值滤波后的信号');
%混合信号 Mix_Signal_2 中值滤波
Signal_Filter=medfilt1(Mix_Signal_2,10);
subplot(4,1,3); %Mix_Signal_2 原始信号
plot(Mix_Signal_2);
axis([0,1000,-10,30]);
title('原始信号 ');
subplot(4,1,4); %Mix_Signal_2 中值滤波后信号
plot(Signal_Filter);
axis([0,1000,-10,30]);
title('中值滤波后的信号');
%****************************************************************************************
%
% 信号Mix_Signal_1 和 Mix_Signal_2 分别作维纳滤波
%
%***************************************************************************************
%混合信号 Mix_Signal_1 维纳滤波
figure(5);
Rxx=xcorr(Mix_Signal_1,Mix_Signal_1); %得到混合信号的自相关函数
M=100; %维纳滤波器阶数
for i=1:M %得到混合信号的自相关矩阵
for j=1:M
rxx(i,j)=Rxx(abs(j-i)+N);
end
end
Rxy=xcorr(Mix_Signal_1,Signal_Original_1); %得到混合信号和原信号的互相关函数
for i=1:M
rxy(i)=Rxy(i+N-1);
end %得到混合信号和原信号的互相关向量
h = inv(rxx)*rxy'; %得到所要涉及的wiener滤波器系数
Signal_Filter=filter(h,1, Mix_Signal_1); %将输入信号通过维纳滤波器
subplot(4,1,1); %Mix_Signal_1 原始信号
plot(Mix_Signal_1);
axis([0,1000,-5,5]);
title('原始信号 ');
subplot(4,1,2); %Mix_Signal_1 维纳滤波后信号
plot(Signal_Filter);
axis([0,1000,-5,5]);
title('维纳滤波后的信号');
%混合信号 Mix_Signal_2 维纳滤波
Rxx=xcorr(Mix_Signal_2,Mix_Signal_2); %得到混合信号的自相关函数
M=500; %维纳滤波器阶数
for i=1:M %得到混合信号的自相关矩阵
for j=1:M
rxx(i,j)=Rxx(abs(j-i)+N);
end
end
Rxy=xcorr(Mix_Signal_2,Signal_Original_2); %得到混合信号和原信号的互相关函数
for i=1:M
rxy(i)=Rxy(i+N-1);
end %得到混合信号和原信号的互相关向量
h=inv(rxx)*rxy'; %得到所要涉及的wiener滤波器系数
Signal_Filter=filter(h,1, Mix_Signal_2); %将输入信号通过维纳滤波器
subplot(4,1,3); %Mix_Signal_2 原始信号
plot(Mix_Signal_2);
axis([0,1000,-10,30]);
title('原始信号 ');
subplot(4,1,4); %Mix_Signal_2 维纳滤波后信号
plot(Signal_Filter);
axis([0,1000,-10,30]);
title('维纳滤波后的信号');
%****************************************************************************************
%
% 信号Mix_Signal_1 和 Mix_Signal_2 分别作自适应滤波
%
%***************************************************************************************
%混合信号 Mix_Signal_1 自适应滤波
figure(6);
N=1000; %输入信号抽样点数N
k=100; %时域抽头LMS算法滤波器阶数
u=0.001; %步长因子
%设置初值
yn_1=zeros(1,N); %output signal
yn_1(1:k)=Mix_Signal_1(1:k); %将输入信号SignalAddNoise的前k个值作为输出yn_1的前k个值
w=zeros(1,k); %设置抽头加权初值
e=zeros(1,N); %误差信号
%用LMS算法迭代滤波
for i=(k+1):N
XN=Mix_Signal_1((i-k+1):(i));
yn_1(i)=w*XN';
e(i)=Signal_Original_1(i)-yn_1(i);
w=w+2*u*e(i)*XN;
end
subplot(4,1,1);
plot(Mix_Signal_1); %Mix_Signal_1 原始信号
axis([k+1,1000,-4,4]);
title('原始信号');
subplot(4,1,2);
plot(yn_1); %Mix_Signal_1 自适应滤波后信号
axis([k+1,1000,-4,4]);
title('自适应滤波后信号');
%混合信号 Mix_Signal_2 自适应滤波
N=1000; %输入信号抽样点数N
k=500; %时域抽头LMS算法滤波器阶数
u=0.000011; %步长因子
%设置初值
yn_1=zeros(1,N); %output signal
yn_1(1:k)=Mix_Signal_2(1:k); %将输入信号SignalAddNoise的前k个值作为输出yn_1的前k个值
w=zeros(1,k); %设置抽头加权初值
e=zeros(1,N); %误差信号
%用LMS算法迭代滤波
for i=(k+1):N
XN=Mix_Signal_2((i-k+1):(i));
yn_1(i)=w*XN';
e(i)=Signal_Original_2(i)-yn_1(i);
w=w+2*u*e(i)*XN;
end
subplot(4,1,3);
plot(Mix_Signal_2); %Mix_Signal_1 原始信号
axis([k+1,1000,-10,30]);
title('原始信号');
subplot(4,1,4);
plot(yn_1); %Mix_Signal_1 自适应滤波后信号
axis([k+1,1000,-10,30]);
title('自适应滤波后信号');
%****************************************************************************************
%
% 信号Mix_Signal_1 和 Mix_Signal_2 分别作小波滤波
%
%***************************************************************************************
%混合信号 Mix_Signal_1 小波滤波
figure(7);
subplot(4,1,1);
plot(Mix_Signal_1); %Mix_Signal_1 原始信号
axis([0,1000,-5,5]);
title('原始信号 ');
subplot(4,1,2);
[xd,cxd,lxd] = wden(Mix_Signal_1,'sqtwolog','s','one',2,'db3');
plot(xd); %Mix_Signal_1 小波滤波后信号
axis([0,1000,-5,5]);
title('小波滤波后信号 ');
%混合信号 Mix_Signal_2 小波滤波
subplot(4,1,3);
plot(Mix_Signal_2); %Mix_Signal_2 原始信号
axis([0,1000,-10,30]);
title('原始信号 ');
subplot(4,1,4);
[xd,cxd,lxd] = wden(Mix_Signal_2,'sqtwolog','h','sln',3,'db3');
plot(xd); %Mix_Signal_2 小波滤波后信号
axis([0,1000,-10,30]);
title('小波滤波后信号 ');
七中滤波方法测试matlab实现的更多相关文章
- JavaScript回调函数及数组方法测试
JavaScript回调函数及数组方法测试 具体代码如下: <!DOCTYPE html> <html lang="en"> <head> &l ...
- 【转】Unity3D Transform中有关旋转的属性和方法测试
Transform有关旋转个属性和方法测试 一,属性 1,var eulerAngles : Vector3 public float yRotation = 5.0F; void Update() ...
- mybatis-使用junit测试与main方法测试结果不一致问题
今天使用ieda写mybatis程序感觉太不友好了,而且也没找到问题所在.问题:写的user.xml中的语句与输出的语句不一样.尝试了各种办法都没有解决. mybatis配置的使用的查询实体.xml ...
- 三维重建面试0:*SLAM滤波方法的串联综述
知乎上的提问,高翔作了回答:能否简单并且易懂地介绍一下多个基于滤波方法的SLAM算法原理? 写的比较通顺,抄之.如有异议,请拜访原文.如有侵权,请联系删除. 我怎么会写得那么长--如果您有兴趣可以和我 ...
- ES5新增数组方法测试和字符串常见API测试
首先是ES5新增数组方法测试: <!DOCTYPE html><html lang="en"><head> <meta charset=& ...
- ASP.NET Core搭建多层网站架构【3-xUnit单元测试之简单方法测试】
2020/01/28, ASP.NET Core 3.1, VS2019, xUnit 2.4.0 摘要:基于ASP.NET Core 3.1 WebApi搭建后端多层网站架构[3-xUnit单元测试 ...
- [方法]季节调整与hp滤波方法
进行时间序列的数据分析时,季节因素调整与hp滤波是进行数据处理与准备工作的常见必要环节.本文简要梳理季节调整与hp滤波的应用场景,以及在Python中的实现方法. 1. 季节调整方法 季节调整的目的是 ...
- 粒子滤波跟踪移动机器人(MATLAB Robotics System Toolbox)
MathWorks从MATLAB 2015a开始推出与ROS集成的Robotics System Toolbox(机器人系统工具箱),它为自主移动机器人的研发提供现成的算法和硬件接口. 粒子滤波基本流 ...
- Go语言test之类方法测试
Go语言提供了完善的单元测试支持,开发人员可以方便的编写测试代码,保证自己代码的质量.在目前的例子中,一般看到都是普通函数的例子.下面我将通过类方法的单元测试例子来展示一下Go语言的魅力. 首先是代码 ...
随机推荐
- 为什么android的R类要定义成16进制
联想到c语言中的宏定义:我想是一个原因 如: #define SDL_INIT_TIMER 0x00000001 #define SDL_INIT_AUDIO 0x00000010 #define S ...
- [杂题]URAL2047. Maths
题意:构造一个长度为n的串,使得 除了第一个以外,每个位置的前缀和的因子个数恰好等于该位置上的数. n$\le 100000$ 举个例子$a_i$:2 4 6 6 4 8 ...
- Git命令参考手册(转)
git init # 初始化本地git仓库(创建新仓库) git config --global user.name "xxx" # 配置用户名 git config --glob ...
- 欧拉工程第73题:Counting fractions in a range
题目链接:https://projecteuler.net/problem=73 n/d的真分数 ,当d<=12000时 在 1/3 and 1/2 之间的有多少个 public class P ...
- Error building Player: Win32Exception: ApplicationName=‘xxxxxxxxxxxxxxxxxx//sdk\tools\zipalign.exe' , CommandLine='4 的解决办法
更新了安卓SDK后,有时候Unity编译失失败,报错类似 Error building Player: Win32Exception: ApplicationName='D:/Program File ...
- iOS 精确定时器
Do I need a high precision timer? Don't use a high precision timer unless you really need it. They c ...
- 基于Spring设计并实现RESTful Web Services(转)
基于Spring设计并实现RESTful Web Services 在本教程中,你将会使用Spring来创建一个具有生产力的RESTful网络服务. 为什么用RESTful网络服务? 从和Amazon ...
- redhat 安装telnet服务
系统默认不安装telnet服务的,所有要安装的话,可以加载redhat 光盘.我的操作是在VM上完成的 vm加载系统光盘:设备状态选择已连接,ISO映像文件选择完整的镜像文件路径,例如: D:\sof ...
- POI 中的CellRangeAddress 参数
在用poi在EXECL报表设计的时候,遇到单元格合并问题,用到一个重要的函数: CellRangeAddress(int, int, int, int) 参数:起始行号,终止行号, 起始列号,终止列号 ...
- opencv 画延长线
hough变换可以让我们检测到直线,这在前面已有详解,对于车道检测,我们需要其到图像边界的延长线一遍之后数据帧分析. 以下代码帮助我们在opencv中画延长线,本来想用虚线表示延长线的,无奈参数调不好 ...