目标检测-SSD算法从零实现
1. 几个工具函数
def box_corner_to_center(boxes):
"""从(左上,右下)转换到(中间,宽度,高度)"""
x1, y1, x2, y2 = boxes[:, 0], boxes[:, 1], boxes[:, 2], boxes[:, 3]
cx = (x1 + x2) / 2
cy = (y1 + y2) / 2
w = x2 - x1
h = y2 - y1
boxes = torch.stack((cx, cy, w, h), axis=-1)
return boxes
def box_center_to_corner(boxes):
"""从(中间,宽度,高度)转换到(左上,右下)"""
cx, cy, w, h = boxes[:, 0], boxes[:, 1], boxes[:, 2], boxes[:, 3]
x1 = cx - 0.5 * w
y1 = cy - 0.5 * h
x2 = cx + 0.5 * w
y2 = cy + 0.5 * h
boxes = torch.stack((x1, y1, x2, y2), axis=-1)
return boxes
def bbox_to_rect(bbox, color):
# 将边界框(左上x,左上y,右下x,右下y)格式转换成matplotlib格式:
# ((左上x,左上y),宽,高)
return plt.Rectangle(
xy=(bbox[0], bbox[1]), width=bbox[2]-bbox[0], height=bbox[3]-bbox[1],
fill=False, edgecolor=color, linewidth=2)
# 显示以图像中一个像素为中心的所有锚框
def show_bboxes(axes, bboxes, labels=None, colors=None):
"""显示所有边界框"""
def _make_list(obj, default_values=None):
if obj is None:
obj = default_values
elif not isinstance(obj, (list, tuple)):
obj = [obj]
return obj
labels = _make_list(labels)
colors = _make_list(colors, ['b','g','r','m','c'])
for i, bbox in enumerate(bboxes):
color = colors[i % len(colors)]
rect = bbox_to_rect(bbox.detach().numpy(),color)
axes.add_patch(rect)
if labels and len(labels) > i:
text_color = 'k' if color == 'w' else 'w'
axes.text(rect.xy[0], rect.xy[1], labels[i], va='center',
ha='center', fontsize=9, color=text_color,
bbox=dict(facecolor=color, lw=0))
2. 生成锚框
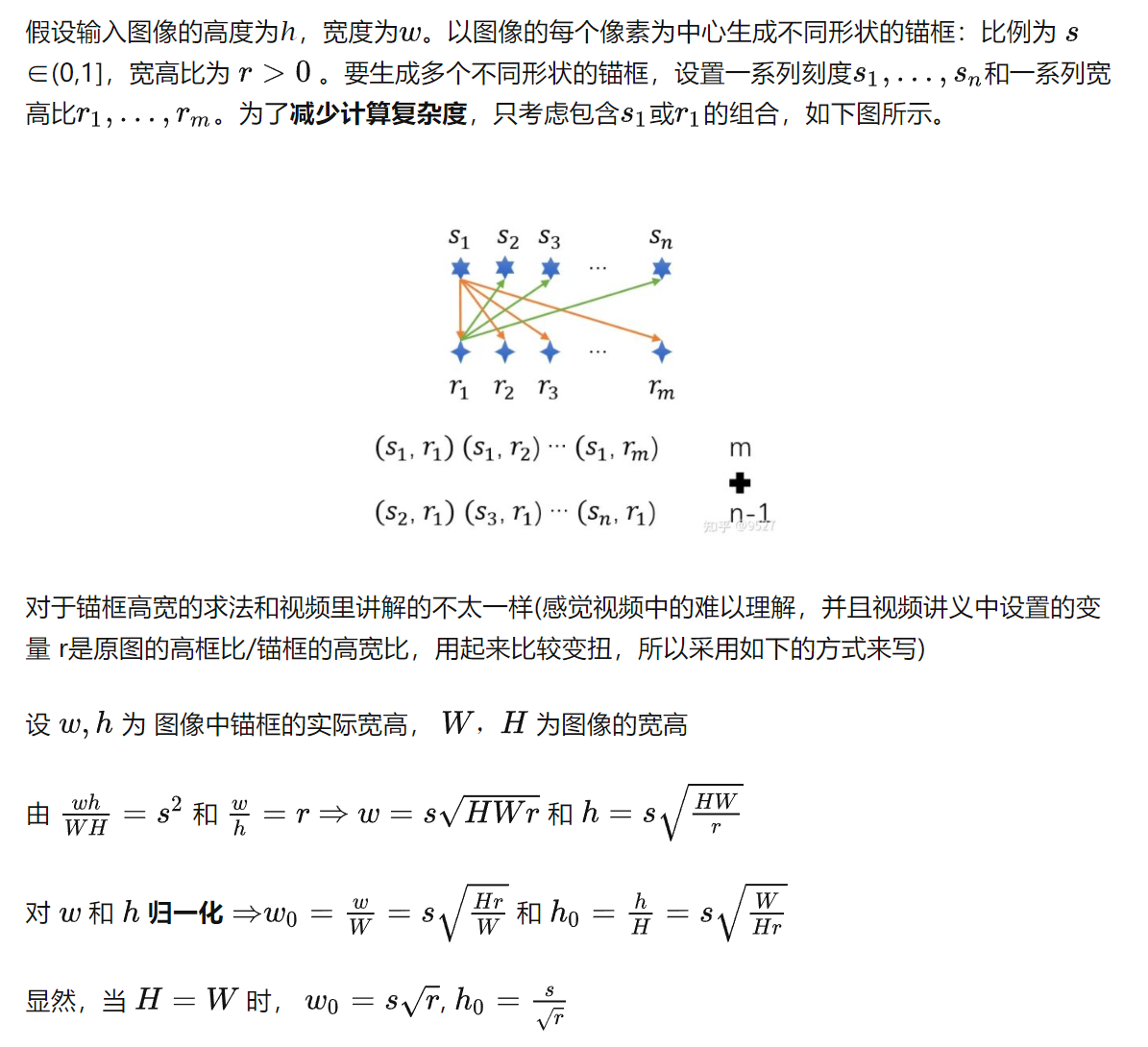
def multibox_prior(img, sizes, ratios):
"""生成以每个像素为中心具有不同形状的锚框"""
in_height, in_width = img.shape[-2:]
device, num_sizes, num_ratios = img.device, len(sizes), len(ratios)
boxes_per_pixel = (num_sizes + num_ratios - 1)
size_tensor = torch.tensor(sizes, device=device)
ratio_tensor = torch.tensor(ratios, device=device)
# 生成锚框的所有中心点
# 这里以0 1 2为例,中心点是0.5和1.5所以要加上0.5, /in_height是为了进行归一化
center_h = (torch.arange(in_height, device=device) + 0.5) / in_height
center_w = (torch.arange(in_width, device=device) + 0.5) / in_width
shift_y, shift_x = torch.meshgrid(center_h, center_w, indexing='ij')
shift_y, shift_x = shift_y.reshape(-1), shift_x.reshape(-1)#此时shift_y和shift_x一对一地形成了所有中心点下标
# 生成“boxes_per_pixel”个高和宽,
# 之后用于创建锚框的四角坐标(xmin,xmax,ymin,ymax)
# w为一行,其中每个元素为不同的锚框的宽度
w = torch.cat((sizes[0] * torch.sqrt(in_height * ratio_tensor[:] / in_width),
size_tensor[1:] * torch.sqrt(in_height * ratio_tensor[0] / in_width)))
# h为一行,其中每个元素为不同的锚框的高度
h = torch.cat((sizes[0] * torch.sqrt(in_width / ratio_tensor[:] / in_height),
size_tensor[1:] * torch.sqrt(in_width / ratio_tensor[0] / in_height)))
# 除以2来获得半高和半宽
anchor_manipulations = torch.stack((-w, -h, w, h)).T.repeat(in_height * in_width, 1) / 2
# 每个中心点都将有“boxes_per_pixel”个锚框,
# 所以生成含所有锚框中心的网格,重复了“boxes_per_pixel”次
out_grid = torch.stack([shift_x, shift_y, shift_x, shift_y],
dim=1).repeat_interleave(boxes_per_pixel, dim=0)
output = out_grid + anchor_manipulations
# 只能返回一张图片的所有锚框
return output.unsqueeze(0) # 1 * 锚框个数 * 4(左上和右下下标)
3. 给锚框打标签
- 首先提供一个计算锚框之间的交并比的函数
# 交并比(IoU)
def box_iou(boxes1,boxes2):
# 左上右下形式坐标
# boxes1:(boxes1的数量,4),
# boxes2:(boxes2的数量,4),
"""计算两个锚框或边界框列表中成对的交并比"""
box_area = lambda boxes: ((boxes[:,2] - boxes[:,0]) *
(boxes[:,3] - boxes[:,1]))
areas1 = box_area(boxes1) # 锚框1的面积
areas2 = box_area(boxes2) # 锚框2的面积
inter_upperlefts = torch.max(boxes1[:,None,:2],boxes2[:,:2])
inter_lowerrights = torch.min(boxes1[:,None,2:],boxes2[:,2:])
inters = (inter_lowerrights - inter_upperlefts).clamp(min=0)
# inter_areasand and union_areas的形状:(boxes1的数量,boxes2的数量)
inter_areas = inters[:,:,0] * inters[:,:,1] # 交集的面积
union_areas = areas1[:,None] + areas2 - inter_areas # 并集的面积
return inter_areas / union_areas # num_box1 * num_box2
- 为锚框分配真实边界框,这样之后才能打标签,偏移量和类别,这里只会把所有满足和真实边界框的iou值大于一定范围的锚框分配,未分配的值为-1
# 将真实边界框分配给锚框
def assign_anchor_to_bbox(anchors,ground_truth,device,iou_threshold=0.5):
"""将最接近的真实边界框分配给锚框"""
num_anchors, num_gt_boxes = anchors.shape[0], ground_truth.shape[0]
jaccard = box_iou(anchors,ground_truth) # 计算所有的锚框和真实边缘框的IOU
anchors_bbox_map = torch.full((num_anchors,), -1, dtype=torch.long, device=device)
max_ious, indices = torch.max(jaccard, dim=1)#indices为每一个锚框对应的真实的边界框的标号, max_ious为每一个锚框对应的真实边界框的iou
anc_i = torch.nonzero(max_ious >= iou_threshold).reshape(-1) #找到所有iou值>0.5的锚框的下标
box_j = indices[max_ious >= iou_threshold]#找到所有iou值>0.5的锚框对应的真实边界框
anchors_bbox_map[anc_i] = box_j
#到现在上面的每一个iou>=0.5的锚框都分配了一个真实的边界框,但是此时并不一定每个真实边界框都分配到了一个锚框,
#所以下面的代码要对每一个真实边界框进行遍历,并未其分配一个锚框
col_discard = torch.full((num_anchors,),-1)
row_discard = torch.full((num_gt_boxes,),-1)
for _ in range(num_gt_boxes):
max_idx = torch.argmax(jaccard, dim=None) # 找IOU最大的锚框,找的是全局最大的锚框
box_idx = (max_idx % num_gt_boxes).long()
anc_idx = (max_idx / num_gt_boxes).long()
anchors_bbox_map[anc_idx] = box_idx
jaccard[:,box_idx] = col_discard # 把最大Iou对应的锚框在 锚框-类别 矩阵中的一列删掉
jaccard[anc_idx,:] = row_discard # 把最大Iou对应的锚框在 锚框-类别 矩阵中的一行删掉
return anchors_bbox_map#返回每一个分配了边界框的锚框对应的真实边界框的下标
- 接下来就可以给锚框打标签了
def offset_boxes(anchors, assigned_bb, eps=1e-6):
"""对锚框偏移量的转换"""
c_anc = box_corner_to_center(anchors)
c_assigned_bb = box_corner_to_center(assigned_bb)
offset_xy = 10 * (c_assigned_bb[:, :2] - c_anc[:, :2]) / c_anc[:, 2:]
offset_wh = 5 * torch.log(eps + c_assigned_bb[:, 2:] / c_anc[:, 2:])
offset = torch.cat([offset_xy, offset_wh], axis=1)
return offset # 尽量使得 offset 让 machine learning 算法好预测
# 标记锚框的类和偏移量
def multibox_target(anchors, labels):
"""使用真实边界框标记锚框"""
batch_size, anchors = labels.shape[0], anchors.squeeze(0)
batch_offset, batch_mask, batch_class_labels = [], [], []
device, num_anchors = anchors.device, anchors.shape[0]
for i in range(batch_size):
label = labels[i,:,:]
anchors_bbox_map = assign_anchor_to_bbox(anchors,label[:,1:],device)
class_labels = torch.zeros(num_anchors, dtype=torch.long,device=device)
assigned_bb = torch.zeros((num_anchors,4), dtype=torch.float32,device=device)
indices_true =torch.nonzero(anchors_bbox_map >= 0)# 分配了真实边界框的锚框下标
bb_idx = anchors_bbox_map[indices_true] #分配了边界框的锚框对应的真实边界框的下标
class_labels[indices_true] = label[bb_idx,0].long() + 1 #所有锚框对应的类别,0表示背景,>0表示物体, (num_anchors,)
assigned_bb[indices_true] = label[bb_idx, 1:] #所有锚框对应的真实的边界框的坐标,num_anchors * 4
bbox_mask = ((anchors_bbox_map >= 0).float().unsqueeze(-1)).repeat(1,4) # num_anchors * 4,没有分配真实边界框的锚框对应4个0,分配的对应4个1
offset = offset_boxes(anchors, assigned_bb) * bbox_mask#乘上bbox_mask是因为有的锚框对应的真实边界框坐标全是0,为了把这部分去掉, num_anchors*4
batch_offset.append(offset.reshape(-1))
batch_mask.append(bbox_mask.reshape(-1))
batch_class_labels.append(class_labels)
bbox_offset = torch.stack(batch_offset) #batch_size * (num_anchors*4)
bbox_mask = torch.stack(batch_mask) #batch_size * (num_anchors*4)
class_labels = torch.stack(batch_class_labels) #batch_size * num_anchors
# bbox_offset返回每一个锚框到真实标注框的offset偏移
# bbox_mask为0表示背景锚框,就不用了,>0表示对应真实的物体
# class_labels为锚框对应类的编号
return (bbox_offset, bbox_mask, class_labels)
4. 接下来准备模型
- 首先提供用来预测锚框类别和偏移量的层
因为锚框个数太多,如果把每个锚框都拿出来做回归和分类会导致计算量太大,这里采用的方式是利用通道数作为每一个像素点生成的所有锚框的预测,锚框的标签是利用上面的方式标记的,损失便是由这两者产生的,根据损失的梯度下降,网路便可以学会通道便是锚框的预测结果。
def cls_predictor(num_input_channels, num_anchors, num_classes):
"""类别预测层
这里卷积核用的是高宽不变的,因为如果每一个像素点都生成多个锚框,在进行分类会导致参数过大,
所以这里省略了这个步骤,直接通过把每一个像素点生成num_anchors*num_classes个通道,就代替了上面的步骤
Args:
num_input_channels (_type_):特征图的输入通道
num_anchors (_type_):每一个像素生成多少锚框,num_sizes+num_ratios-1
num_classes (_type_):类别数,要包含背景的
"""
return nn.Conv2d(num_input_channels, num_anchors*num_classes, kernel_size=3, padding=1)
def offset_predictor(num_input_channels, num_anchors):
"""边界框预测层
这里卷积核用的是高宽不变的,因为如果每一个像素点都生成多个锚框,在进行预测4个偏移量导致参数过大,
所以这里省略了这个步骤,直接通过把每一个像素点生成num_anchors*4个通道,就代替了上面的步骤
Args:
num_input_channels (_type_):特征图的输入通道
num_anchors (_type_):每一个像素生成多少锚框,num_sizes+num_ratios-1
"""
return nn.Conv2d(num_input_channels, num_anchors*4, kernel_size=3, padding=1)
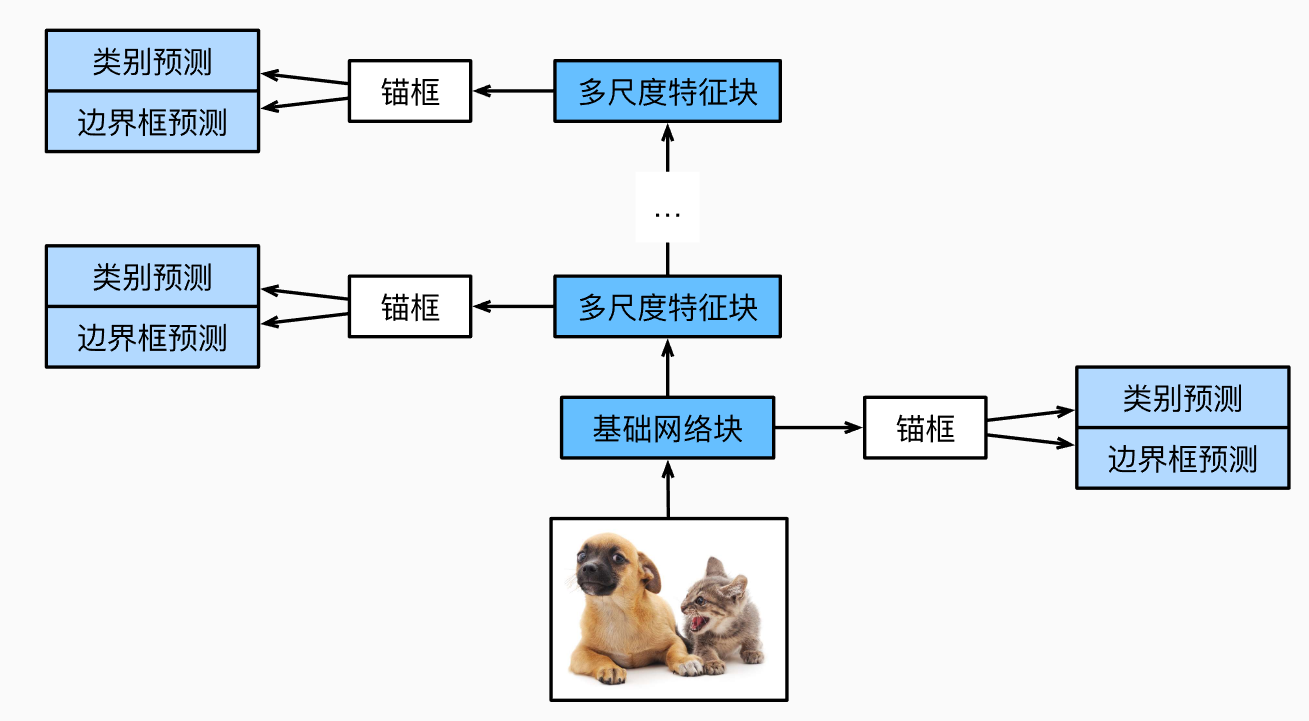
- 接下来提供网络模型的结构,总共有5层
def down_sample_blk(in_channels, out_channels):
# 高宽减半
blk = []
for _ in range(2):
blk.append(nn.Conv2d(in_channels, out_channels, kernel_size=3, padding=1))
blk.append(nn.BatchNorm2d(out_channels))
blk.append(nn.ReLU())
in_channels = out_channels
blk.append(nn.MaxPool2d(kernel_size=2))
return nn.Sequential(*blk)
def base_net():
# 从输入图像中抽取特征的网络
# channels:3 -> 64
# 高宽减小了8倍
blk = []
num_filters = [3, 16, 32, 64]
for i in range(len(num_filters)-1):
blk.append(down_sample_blk(num_filters[i], num_filters[i+1]))
return nn.Sequential(*blk)
def get_blk(i):
if i == 0:
blk = base_net()
elif i == 1:
blk = down_sample_blk(64, 128)
elif i == 4:
blk = nn.AdaptiveMaxPool2d((1, 1))
else:
blk = down_sample_blk(128, 128)
return blk
- 定义网络中的每层的前向传播函数
def blk_forward(x, blk, size, ratio, cls_predictor, offset_predictor):
"""为每个块定义前向传播
Args:
x (_type_):输入的特征图,batch * channel * h * w
blk (_type_):网络
size (_type_):生成锚框的尺寸
ratio (_type_):生成锚框的高宽比
cls_predictor (_type_):用于分类的conv
offset_predictor (_type_):用于回归的conv
Returns:
CNN特征图y;在当前尺度下根据y生成的锚框;预测的这些锚框的类别和偏移量(基于y)
"""
y = blk(x)
# 以下两个预测相当于生成锚框再进行的预测
cls_preds = cls_predictor(y)
offset_preds = offset_predictor(y)
# 生成锚框
anchors = mb.multibox_prior(y, sizes=size, ratios=ratio)
return (y, anchors, cls_preds, offset_preds)
- 定义网络
class TinySSD(nn.Module):
def __init__(self, num_classes):
super().__init__()
self.num_classes = num_classes
idx_to_in_channels = [64, 128, 128, 128, 128]
for i in range(5):
setattr(self, f'blk_{i}', get_blk(i))
setattr(self, f'cls_{i}', cls_predictor(idx_to_in_channels[i], num_anchors, self.num_classes))
setattr(self, f'offset_{i}', offset_predictor(idx_to_in_channels[i], num_anchors))
def flatten_pred(self, pred):
"""把四维的pred展平成二维
先把通道放到最后一维是因为这样对于每一个像素点的预测后面都是连续的值
Args:
pred (_type_):一个batch的预测
Returns:
展平后的张量
"""
return torch.flatten(pred.permute(0, 2, 3, 1), start_dim=1)
def concat_preds(self, preds):
return torch.cat([self.flatten_pred(p) for p in preds], dim=1)
def forward(self, x):
anchors, cls_preds, offset_preds = [None] * 5, [None] * 5, [None] * 5
for i in range(5):
x, anchors[i], cls_preds[i], offset_preds[i] = blk_forward(
x, getattr(self, f'blk_{i}'), sizes[i], ratios[i], getattr(self, f'cls_{i}'), getattr(self, f'offset_{i}'))
# 注意以下的num_all_anchors指的是一个样本在所有特征图上生成的锚框
anchors = torch.cat(anchors, dim=1)# 1*num_all_anchors*4
cls_preds = self.concat_preds(cls_preds)# batch*(num_all_anchors*num_classes)
cls_preds = cls_preds.reshape(cls_preds.shape[0], -1, self.num_classes)
offset_preds = self.concat_preds(offset_preds)# batch*(num_all_anchors*4)
return anchors, cls_preds, offset_preds
- 定义损失函数
cls_loss = nn.CrossEntropyLoss(reduction='none')
offset_loss = nn.L1Loss(reduction='none')
def calc_loss(cls_preds, cls_labels, offset_preds, offset_labels, offset_masks):
batch_size, num_classes = cls_preds.shape[0], cls_preds.shape[2]
l1 = cls_loss(cls_preds.reshape(-1, num_classes), cls_labels.reshape(-1))
l1 = l1.reshape(batch_size, -1).mean(dim=1)
l2 = offset_loss(offset_preds*offset_masks, offset_labels*offset_masks).mean(dim=1)
return l1 + l2
- 定义评测的函数
# 分类准确率函数
def cls_eval(cls_preds, cls_labels):
# 返回这个batch中所有锚框预测正确的个数
return float((cls_preds.argmax(dim=-1).type(cls_labels.dtype) == cls_labels).sum())
def offset_eval(offset_preds, offset_labels, offset_mask):
# 返回这个batch中的所有的锚框预测的偏移量的损失
return float((torch.abs((offset_preds - offset_labels) * offset_mask)).sum())
5. 训练
- 定义训练函数和一些初始化参数
device, net = mb.try_gpu(), TinySSD(num_classes = 2)
updater = torch.optim.SGD(net.parameters(), lr = 0.2, weight_decay=0)
num_epochs = 10
animator = mb.Animator(xlabel='epoch', xlim=[1, num_epochs], legend=['class error', 'offset mae'])
net = net.to(device)
#blk_forward中会调用sizes和ratios,用来生成锚框用
sizes = [[0.2, 0.272], [0.37, 0.447], [0.54, 0.619], [0.71, 0.79], [0.88, 0.961]]
ratios = [[1, 2, 0.5]]*5
num_anchors = len(sizes[0]) + len(ratios[0]) - 1
for epoch in range(num_epochs):
metric = mb.Accumulator(4)
net.train()
for x, y in train_iter:
x, y = x.to(device), y.to(device)
y = y / 256 #因为原图就是256*256的,为了把标签归一化
anchors, cls_preds, offset_preds = net(x) #得到批量预测结果和锚框
offset_labels, offset_mask, cls_labels = mb.multibox_target(anchors, y) #得到批量anchors的标签
l = calc_loss(cls_preds, cls_labels, offset_preds, offset_labels, offset_mask)
updater.zero_grad()
l.mean().backward()
updater.step()
metric.add(cls_eval(cls_preds, cls_labels), cls_labels.numel(),
offset_eval(offset_preds, offset_labels, offset_mask), offset_labels.numel())
cls_err = 1 - metric[0] / metric[1]
offset_mae = metric[2] / metric[3]
animator.add(epoch+1, (cls_err, offset_mae))
6. 预测
- 首先定义非极大抑制函数
非极大抑制就是把所有的预测框按照置信度从大到小排序,把和最大的预测框的iou值大于一定阈值的预测框设置为背景
def nms(boxes, scores, iou_threshold):
#boxes为所有的预测框, scores为每个预测框对应的预测类别概率最大的值
#对预测边界框的置信度进行排序
B = torch.argsort(scores, dim = -1, descending=True)#得到从大到小的预测概率所对应的预测框下标
keep = []
while B.numel()>0: # 直到把所有框都访问过了,再退出循环
i = B[0] # B中的预测概率最大值的下标(对应着相应的预测框)
keep.append(i)
if B.numel() == 1: break
# 所有的iou大于阈值的全部去掉
iou = box_iou(boxes[i,:].reshape(-1,4),
boxes[B[1:],:].reshape(-1,4)).reshape(-1)
inds = torch.nonzero(iou <= iou_threshold).reshape(-1) #得到所有<阈值的下标
B = B[inds + 1]#+1是因为得到这些与最大概率预测框的iou小于阈值的预测框的在B中的下标,然后把B更新成小于阈值的预测框
return torch.tensor(keep, dtype=torch.long, device=boxes.device)#返回未被抑制的预测框的下标
# 将非极大值抑制应用于预测边界框
def multibox_detection(cls_probs,offset_preds,anchors,nms_threshold=0.5,pos_threshold=0.009999999):
#cls_probs:每一个预测框对每一类的预测概率,batch * num_classes * num_predicted_bb
#offset_preds:batch * num_anchors * 4
device, batch_size = cls_probs.device, cls_probs.shape[0]
anchors = anchors.squeeze(0)
num_classes, num_anchors = cls_probs.shape[1], cls_probs.shape[2]
out = []
for i in range(batch_size):
cls_prob, offset_pred = cls_probs[i], offset_preds[i].reshape(-1,4) # num_anchors * 4
predicted_bb = offset_inverse(anchors,offset_pred) # 把预测框拿出来
#下面conf得到不考率背景的每一个预测框的对每一类物体的最大概率值和相应的下标,classid这里变成用0代表第一类物体了
#不考虑背景是因为在抑制的时候防止因为背景框把物体检测的框抑制了
conf, class_id = torch.max(cls_prob ,dim = 0)
background_indices = torch.nonzero(class_id == 0).reshape(-1)# 背景预测框的下标
non_background_indices = torch.nonzero(class_id != 0).reshape(-1)# 非背景预测框的下标
non_back_predictbb = predicted_bb[non_background_indices]
non_back_conf = conf[non_background_indices]
keep = nms(non_back_predictbb, non_back_conf, nms_threshold)
# 获取被抑制的预测框
non_keep = []
for idx, _ in enumerate(non_back_predictbb):
if idx not in keep:
non_keep.append(idx)
# 将被抑制的预测框的类别设置为0
class_id[non_background_indices[non_keep]] = 0
# 下面就是把所有预测框重新排列了一下,前面放的没有被抑制的,后面放的被抑制的
all_sorted_indices = torch.cat((non_background_indices[keep], #非背景框
non_background_indices[non_keep],#背景框
background_indices), dim=0)#背景框
class_id = class_id[all_sorted_indices]
conf = conf[all_sorted_indices]
predicted_bb = predicted_bb[all_sorted_indices]
# pos_threshold是一个用于非背景预测的阈值, 如果有预测目标概率小于pos那个值则被视为背景
below_min_idx = (conf < pos_threshold)
class_id[below_min_idx] = 0
conf[below_min_idx] = 1 - conf[below_min_idx] # 增加背景的置信度
# 返回预测的信息,共num_anchors行,每一行6个信息,分别为:类别,预测概率值,4个左上右下坐标
pred_info = torch.cat((class_id.unsqueeze(1), conf.unsqueeze(1), predicted_bb), dim=1)
out.append(pred_info)
return torch.stack(out)#batch*(共num_anchors行,每一行6个信息,分别为:类别,预测概率值,4个左上右下坐标)
- 定义预测函数
x, y = next(iter(train_iter))
x = x[0]
img = x.permute(1, 2, 0)
x = x.unsqueeze(0)
def predict(X):
net.eval()
net.to(device)
X = X.to(device)
anchors, cls_preds, offset_preds = net(X)
cls_probs = F.softmax(cls_preds, dim=2).permute(0, 2, 1)
output = mb.multibox_detection(cls_probs, offset_preds, anchors)
idx = [i for i, row in enumerate(output[0]) if row[0] != 0]
return output[0, idx]#第0个样本,idx下表对应的锚框
output = predict(x)
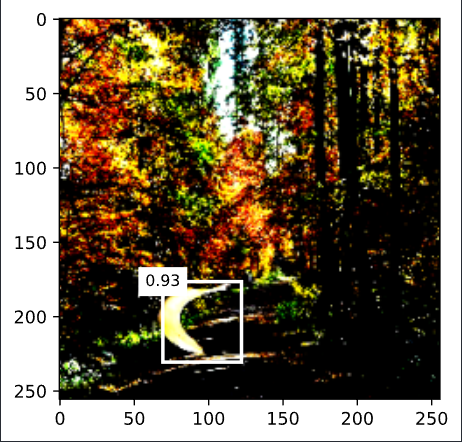
def display(img, output, threshold):
fig = mb.plt.imshow(img)
for row in output:
score = float(row[1])
if score < threshold:
continue
h, w = img.shape[0:2]
bbox = [row[2:6] * torch.tensor((w, h, w, h), device=row.device)]
mb.show_bboxes(fig.axes, bbox, '%.2f' % score, 'w')
display(img, output.cpu(), threshold=0.9)
- 结果
目标检测-SSD算法从零实现的更多相关文章
- AI佳作解读系列(二)——目标检测AI算法集杂谈:R-CNN,faster R-CNN,yolo,SSD,yoloV2,yoloV3
1 引言 深度学习目前已经应用到了各个领域,应用场景大体分为三类:物体识别,目标检测,自然语言处理.本文着重与分析目标检测领域的深度学习方法,对其中的经典模型框架进行深入分析. 目标检测可以理解为是物 ...
- CVPR2020论文介绍: 3D 目标检测高效算法
CVPR2020论文介绍: 3D 目标检测高效算法 CVPR 2020: Structure Aware Single-Stage 3D Object Detection from Point Clo ...
- 深度学习与CV教程(13) | 目标检测 (SSD,YOLO系列)
作者:韩信子@ShowMeAI 教程地址:http://www.showmeai.tech/tutorials/37 本文地址:http://www.showmeai.tech/article-det ...
- 目标检测--SSD: Single Shot MultiBox Detector(2015)
SSD: Single Shot MultiBox Detector 作者: Wei Liu, Dragomir Anguelov, Dumitru Erhan, Christian Szegedy, ...
- 目标检测-ssd
intro: ECCV 2016 Oral arxiv: http://arxiv.org/abs/1512.02325 paper: http://www.cs.unc.edu/~wliu/pape ...
- CNN目标检测系列算法发展脉络——学习笔记(一):AlexNet
在咨询了老师的建议后,最近开始着手深入的学习一下目标检测算法,结合这两天所查到的资料和个人的理解,准备大致将CNN目标检测的发展脉络理一理(暂时只讲CNN系列部分,YOLO和SSD,后面会抽空整理). ...
- [目标检测]SSD原理
1 SSD基础原理 1.1 SSD网络结构 SSD使用VGG-16-Atrous作为基础网络,其中黄色部分为在VGG-16基础网络上填加的特征提取层.SSD与yolo不同之处是除了在最终特征图上做目标 ...
- 目标检测 | 经典算法 Cascade R-CNN: Delving into High Quality Object Detection
作者从detector的overfitting at training/quality mismatch at inference问题入手,提出了基于multi-stage的Cascade R-CNN ...
- 目标检测YOLO算法-学习笔记
算法发展及对比: 17年底,mask-R CNN YOLO YOLO最大的优势就是快 原论文中流程,可以检测出20类物体. 红色网格-张量,在这样一个1×30的张量中保存的数据 横纵坐标中心点缩放到0 ...
随机推荐
- 搭建zabbix及报错处理
搭建ZABBIX服务器准备工作 1.需要服务器是LAMP 或 LNMP 环境 2.主机名和IP要写在HOST文件里 3.iptables 和 selinux 必须关闭 一.先用最简单的方式搭建lamp ...
- Java开发学习(七)----DI依赖注入之自动装配与集合注入
一.自动配置 上一篇博客花了大量的时间把Spring的注入去学习了下,总结起来就两个字麻烦.麻烦在配置文件的编写配置上.那有更简单方式么?有,自动配置 1.1 依赖自动装配 IoC容器根据bean所依 ...
- 最优化:凸集、凸函数、KKT条件极其解释
1.凸集(大概定义) 2.凸函数 3.KK条件
- 创建多线程程序的第一种方式_创建Thread类的子类
创建多线程程序的第一种方式:创建Thread类的子类java.lang.Thread类:是描述线程的类,我们想要实现多线程程序,就必须继承Thread类 实现步骤: 1.创建一个Thread类的子类 ...
- XJSON 是如何实现四则运算的?
前言 在上一篇中介绍了 xjson 的功能特性以及使用查询语法快速方便的获取 JSON 中的值. 同时这次也更新了一个版本,主要是两个升级: 对转义字符的支持. 性能优化,大约提升了30%️. 转义字 ...
- Josephus问题(Ⅱ)
题目描述 n个人排成一圈,按顺时针方向依次编号1,2,3-n.从编号为1的人开始顺时针"一二"报数,报到2的人退出圈子.这样不断循环下去,圈子里的人将不断减少.最终一定会剩下一个人 ...
- DFS序和7种模型
DFS序就是将树的节点按照先根的顺序遍历得到的节点顺序 性质:一个子树全在一个连续的区间内,可以与线段树和树状数组搭配使用 很好写,只需在dfs中加几行代码即可. 代码: void dfs(ll u, ...
- python在执行命令时添加环境变量或指定执行路径
cwd: 命令的执行路径,相当于os.chdir('/home')提前切换到对应路径 env: 环境变量,某些执行路径需要添加必须的环境变量,例如fastboot依赖与adb路径下的环境变量 impo ...
- 20220724-Java的继承
目录 含义 代码示例 使用方法和注意事项 个人理解 含义 继承Extends 面向对象最显著的一个特性,继承是从已有的类中派生出新的类,新的类能吸收已有类的性和方法,并能扩展新的能力. 代码示例 cl ...
- 关于静态 RMQ 问题
目录 1. 普通做法 2. Four Russian 算法 3. 随机数据的一种做法 4. 有关转 LCA 的做法 1.1. RMQ 转 LCA 再转 ±1RMQ(RMQ 标准算法) 1.2. 一个优 ...