相机imu外参标定
1. 第一步初始化imu外参(可以从参数文档中读取,也可以计算出),VINS中处理如下:
# Extrinsic parameter between IMU and Camera.
estimate_extrinsic: # Have an accurate extrinsic parameters. We will trust the following imu^R_cam, imu^T_cam, don't change it.
# Have an initial guess about extrinsic parameters. We will optimize around your initial guess.
# Don't know anything about extrinsic parameters. You don't need to give R,T. We will try to calibrate it. Do some rotation movement at beginning.
#If you choose or , you should write down the following matrix.
#Rotation from camera frame to imu frame, imu^R_cam
extrinsicRotation: !!opencv-matrix
rows:
cols:
dt: d
data: [0.0148655429818, -0.999880929698, 0.00414029679422,
0.999557249008, 0.0149672133247, 0.025715529948,
-0.0257744366974, 0.00375618835797, 0.999660727178]
#Translation from camera frame to imu frame, imu^T_cam
extrinsicTranslation: !!opencv-matrix
rows:
cols:
dt: d
data: [-0.0216401454975,-0.064676986768, 0.00981073058949]
2. 在优化中,每来一帧则对外参更新一次
Matrix3d ric[NUM_OF_CAM];
Vector3d tic[NUM_OF_CAM];
//添加参数块
ceres::LocalParameterization *local_parameterization = new PoseLocalParameterization();
problem.AddParameterBlock(para_Ex_Pose[i], SIZE_POSE, local_parameterization);
if (!ESTIMATE_EXTRINSIC)
{
ROS_DEBUG("fix extinsic param");
problem.SetParameterBlockConstant(para_Ex_Pose[i]);
}
else
ROS_DEBUG("estimate extinsic param");
//添加残差块
if (ESTIMATE_TD)
{
ProjectionTdFactor *f_td = new ProjectionTdFactor(pts_i, pts_j, it_per_id.feature_per_frame[].velocity, it_per_frame
it_per_id.feature_per_frame[].cur_td, it_per_frame.cur_td,
it_per_id.feature_per_frame[].uv.y(), it_per_frame.uv.y());
problem.AddResidualBlock(f_td, loss_function, para_Pose[imu_i], para_Pose[imu_j], para_Ex_Pose[], para_Feature[feature_index], para_Td[]); }
else
{
ProjectionFactor *f = new ProjectionFactor(pts_i, pts_j);
problem.AddResidualBlock(f, loss_function, para_Pose[imu_i], para_Pose[imu_j], para_Ex_Pose[], para_Feature[feature_inde
}
该残差块为视觉模型计算重投影误差 Vision Model
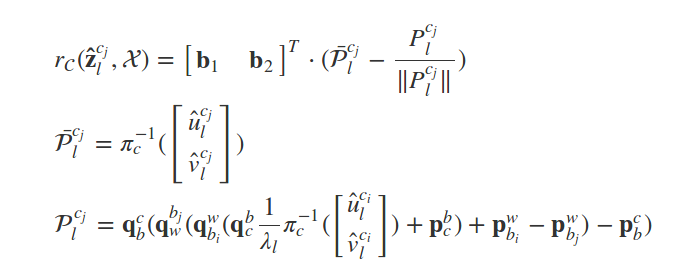
空间上的一个3D特征点会被camera多次观测到,jth 图像帧的camera的残差值被定义为,考虑lth 特征点第一次在ith 图像帧中被观察到恢复的深度信息,投影到第j 帧图像帧的重投影误差。
3. 相机imu外参的重要性
- 外参是相机和imu之间的桥梁,后端优化是以imu的坐标系为优化基准,所以在进行重投影误差时需要使用外参将空间点转换到相机坐标系。
- 初始化的三角化时也会用到外参来求出两个相机之间的旋转平移。
f_manager.triangulate(Ps, &(TIC_TMP[]), &(RIC[]));
Eigen::Vector3d pts_camera_i = pts_i / inv_dep_i;
Eigen::Vector3d pts_imu_i = qic * pts_camera_i + tic;
Eigen::Vector3d pts_w = Qi * pts_imu_i + Pi;
Eigen::Vector3d pts_imu_j = Qj.inverse() * (pts_w - Pj);
Eigen::Vector3d pts_camera_j = qic.inverse() * (pts_imu_j - tic);
Eigen::Map<Eigen::Vector2d> residual(residuals);
qcb(qbjw(qwbi(qbcqcb(qbjw(qwbi(qbcqcb(qbjw(qwbi(qbcqcb(qbjw(qwbi(qbccjlcjl
相机imu外参标定的更多相关文章
- VINS(四)初始化与相机IMU外参标定
和单目纯视觉的初始化只需要获取R,t和feature的深度不同,VIO的初始化话通常需要标定出所有的关键参数,包括速度,重力方向,feature深度,以及相机IMU外参$R_{c}^{b}$和$p_{ ...
- 相机-imu外参校准总结
1. 研究背景及相关工作 1)研究背景 单目视觉惯性slam是一种旨在跟踪移动平台的增量运动并使用来自单个车载摄像头和imu传感器的测量结果同时构建周围环境地图的技术.视觉相机和惯性测量单元(imu) ...
- 解放双手——相机与IMU外参的在线标定
本文作者 沈玥伶,公众号:计算机视觉life,编辑部成员 一.相机与IMU的融合 在SLAM的众多传感器解决方案中,相机与IMU的融合被认为具有很大的潜力实现低成本且高精度的定位与建图.这是因为这两个 ...
- 相机IMU融合四部曲(三):MSF详细解读与使用
相机IMU融合四部曲(三):MSF详细解读与使用 极品巧克力 前言 通过前两篇文章,<D-LG-EKF详细解读>和<误差状态四元数详细解读>,已经把相机和IMU融合的理论全部都 ...
- 相机IMU融合四部曲(一):D-LG-EKF详细解读
相机IMU融合四部曲(一):D-LG-EKF详细解读 极品巧克力 前言 前两篇文章<Google Cardbord的九轴融合算法>,<Madgwick算法详细解读>,讨论的都是 ...
- 【项目实战】自备相机+IMU跑通Vins-Mono记录
前言 初次接触SLAM,公司要求用自己的设备来跑通vinsmono这个程序,虽然已经跑通了别人的数据包,但是真正自己上手来运行这个程序,发现真的是困难重重,特意在此记载下来整个过程,以供大家参考. 我 ...
- 相机IMU融合四部曲(二):误差状态四元数详细解读
相机IMU融合四部曲(二):误差状态四元数详细解读 极品巧克力 前言 上一篇文章,<D-LG-EKF详细解读>中,讲了理论上的SE3上相机和IMU融合的思想.但是,还没有涉及到实际的操作, ...
- 机械手相机9点坐标标定-基于C#+EmguCV
很多初学者,都对标定概念模糊不清,分不清坐标系之间的关系,搞不清相机标定和机械手相机标定有什么关系,想当初自己也是一个人摸索了很久,本文将尽量给大家解释. 我们通常所说的相机标定分为两种,一种是相机参 ...
- kalibr论文阅读笔记
单目相机IMU标定 该论文将相机IMU标定分为两个大方面: 一. 使用基函数来估计时间偏差 二. 相机和IMU的空间位置转换 校准变量:重力.外参旋转和平移.时钟偏移.IMU位姿.加速度计偏置.陀螺仪 ...
随机推荐
- MS17-010复现
很早之前做的了,今天整理看到了,正好腾到blog上. ########################分割线############################## MS-17-010 攻击者向 ...
- HDU 6386 Age of Moyu 【BFS + 优先队列优化】
任意门:http://acm.hdu.edu.cn/showproblem.php?pid=6386 Age of Moyu Time Limit: 5000/2500 MS (Java/Others ...
- 大数据-图表插件-echarts 样式修改(迭代)
修改折线图大小 myChart.setOption({ title:{ text:"价格指数" ...
- 微信小程序开发——列表分页上拉加载封装实现(订单列表为例,订单状态改变后刷新列表滚动位置不变)
业务需求: 业务需求是给订单列表添加分页功能,也就是上拉加载这种每次只请求加载固定数量的数据. 需求分析: 对业务来说就是简单的分页上拉加载,但是对于技术实现来说,除了要处理分页数据的累加加载,还要处 ...
- Windows 2008 Scheduled tasks result codes
0 or 0x0: The operation completed successfully. 1 or 0x1: Incorrect function called or unknown funct ...
- webpack执行命令失败之解决办法
错误信息:ERROR in multi ./runoob1.js bundle.js Module not found: Error: Can't resolve 'bundle.js' in 'C: ...
- Sonar安装和常见问题解决
Sonar是一款代码质量分析工具,有助于帮助代码质量提高. Sonar的官网地址为:https://www.sonarqube.org/downloads/ 点击 Show All Versions ...
- C++实现的Buffer类
写C#的同志一定觉得Byte []比C++的 BYTE * 加 Length的方式好的多.一来,只需要一个对象就可以是表示一段字节流,另一方面,由于C#的特性,不需要象C++那样还要记得删除指针.由于 ...
- iview中position: 'fixed'最顶层z-index
使用iview时候使用<Header :style="{position: 'fixed', width: '100%'}">不是最顶层解决方案 根据样式进行解决在ap ...
- HUD 1288 Hat's Tea(反向的贪心,非常好的一道题)
传送门:http://acm.hdu.edu.cn/showproblem.php?pid=1288 Hat's Tea Time Limit: 2000/1000 MS (Java/Others) ...