Linux I2C驱动程序设计
1. Linux I2C子系统概述
① Linux将I2C总线驱动进行结构化,将该子系统分成3个部分:I2C核心层、I2C总线驱动和I2C设备驱动。
(1)I2C核心层:提供了I2C总线驱动和设备驱动的注册、注销方法,I2C通信方法(algorithm)上层的、与具体适配器无关的代码以及探测设备、检测设备地址的上层代码等。
(2)I2C总线驱动:I2C总线驱动是对I2C硬件体系结构中适配器端的实现,适配器可由CPU控制,甚至可以直接集成在CPU内部。I2C总线驱动主要包含了I2C适配器数据结构i2c_adapter、I2C适配器的
algorithm数据结构i2c_algorithm和控制I2C适配器产生通信信号的函数。经由I2C总线驱动的代码,我们可以控制I2C适配器以主控方式产生开始位、停止位、读写周期,以及以从设备方式被读写、产生
ACK等。
(3)I2C设备驱动:I2C设备驱动是对I2C硬件体系结构中设备端的实现,设备一般挂接在首CPU控制的I2C适配器上,通过I2C适配器与CPU交换数据。I2C设备驱动主要包含了数据结构i2c_driver和i2c_client,
我们需要根据具体设备实现其中的成员函数。
② Linux I2C 子系统体系架构

2. Linux I2C子系统重要数据结构
① i2c_adapter结构:I2C适配器对象描述结构
struct i2c_adapter {
struct module *owner;
unsigned int id;
unsigned int class; /* classes to allow probing for */
const struct i2c_algorithm *algo; /* the algorithm to access the bus */
void *algo_data;
/* --- administration stuff. */
int (*client_register)(struct i2c_client *);
int (*client_unregister)(struct i2c_client *);
/* data fields that are valid for all devices */
u8 level; /* nesting level for lockdep */
struct mutex bus_lock;
struct mutex clist_lock;
int timeout; /* in jiffies */
int retries;
struct device dev; /* the adapter device */
int nr;
struct list_head clients; /* DEPRECATED */
char name[];
struct completion dev_released;
};
(1)nr:总线编号,对应设备结点/dev/i2c-x中的x
(2)i2c_adapter注册、注销函数
int i2c_add_adapter(struct i2c_adapter *adapter);
int i2c_del_adapter(struct i2c_adapter *adap);
int i2c_add_numbered_adapter(struct i2c_adapter *adap);
② i2c_algorithm结构:I2C适配器的操作方法结构
struct i2c_algorithm {
/* If an adapter algorithm can't do I2C-level access, set master_xfer
to NULL. If an adapter algorithm can do SMBus access, set
smbus_xfer. If set to NULL, the SMBus protocol is simulated
using common I2C messages */
/* master_xfer should return the number of messages successfully
processed, or a negative value on error */
int (*master_xfer)(struct i2c_adapter *adap, struct i2c_msg *msgs,
int num);
int (*smbus_xfer) (struct i2c_adapter *adap, u16 addr,
unsigned short flags, char read_write,
u8 command, int size, union i2c_smbus_data *data);
/* To determine what the adapter supports */
u32 (*functionality) (struct i2c_adapter *);
};
③ i2c_msg结构
struct i2c_msg {
__u16 addr; /* slave address */
__u16 flags;
__u16 len; /* msg length */
__u8 *buf; /* pointer to msg data */
};
④ i2c_driver结构
struct i2c_driver {
int id;
unsigned int class;
int (*attach_adapter)(struct i2c_adapter *);
int (*detach_adapter)(struct i2c_adapter *);
int (*detach_client)(struct i2c_client *) __deprecated;
int (*probe)(struct i2c_client *, const struct i2c_device_id *);
int (*remove)(struct i2c_client *);
/* driver model interfaces that don't relate to enumeration */
void (*shutdown)(struct i2c_client *);
int (*suspend)(struct i2c_client *, pm_message_t mesg);
int (*resume)(struct i2c_client *);
/* a ioctl like command that can be used to perform specific functions
* with the device.
*/
int (*command)(struct i2c_client *client, unsigned int cmd, void *arg);
struct device_driver driver;
const struct i2c_device_id *id_table;
/* Device detection callback for automatic device creation */
int (*detect)(struct i2c_client *, int kind, struct i2c_board_info *);
const struct i2c_client_address_data *address_data;
struct list_head clients;
};
⑤ i2c_client结构:I2C设备对象描述结构
struct i2c_client {
unsigned short flags; /* div., see below */
unsigned short addr; /* chip address - NOTE: 7bit */
/* addresses are stored in the */
/* _LOWER_ 7 bits */
char name[I2C_NAME_SIZE];
struct i2c_adapter *adapter; /* the adapter we sit on */
struct i2c_driver *driver; /* and our access routines */
struct device dev; /* the device structure */
int irq; /* irq issued by device */
struct list_head list; /* DEPRECATED */
struct list_head detected;
struct completion released;
};
3. I2C适配器的设备接口(drivers/i2c/i2c-dev.c)
① I2C模块初始化函数i2c_dev_init()主要完成3种操作:
static int __init i2c_dev_init(void)
{
int res;
...
res = register_chrdev(I2C_MAJOR, "i2c", &i2cdev_fops);
...
i2c_dev_class = class_create(THIS_MODULE, "i2c-dev");
...
res = i2c_add_driver(&i2cdev_driver);
...
(1)注册字符设备,其中主设备号为I2C_MAJOR(89)、次设备号范围为0~255、文件操作集合为i2cdev_fops
(2)注册设备类
(3)添加I2C适配器设备驱动i2cdev_driver
② 当I2C适配器驱动(i2c_driver结构)和适配器(i2c_adapter结构)匹配时,会调用i2cdev_driver(i2c_driver结构)的i2cdev_attach_adapter()成员函数,该函数主要执行两种操作:
static int i2cdev_attach_adapter(struct i2c_adapter *adap)
{
struct i2c_dev *i2c_dev;
i2c_dev = get_free_i2c_dev(adap);
...
/* register this i2c device with the driver core */
i2c_dev->dev = device_create(i2c_dev_class, &adap->dev,
MKDEV(I2C_MAJOR, adap->nr), NULL,
"i2c-%d", adap->nr);
...
}
(1)分配一个与I2C设备对应的i2c_dev对象,并将该对象添加到全局链表i2c_dev_list
(2)创建设备对象并在sysfs中注册
③ I2C适配器字符设备操作方法
static const struct file_operations i2cdev_fops = {
.owner = THIS_MODULE,
.llseek = no_llseek,
.read = i2cdev_read,
.write = i2cdev_write,
.unlocked_ioctl = i2cdev_ioctl,
.open = i2cdev_open,
.release = i2cdev_release,
};
(1)i2cdev_open()函数:
* 获得次设备号,通过i2c_dev_get_by_minor(minor)函数,从链表i2c_dev_list中获取与minor对应的i2c_dev对象
* 通过i2c_get_adapter(i2c->adap->nr)函数获得ID为i2c->adap->nr的适配器对象
* 分配一个i2c_client对象,并用adap、i2c_driver初始化其成员adapter、driver成员,绑定设备与相应适配器和驱动
* 将i2c_client对象作为file结构体的私有数据(file->private_data)保存
static int i2cdev_open(struct inode *inode, struct file *file)
{
unsigned int minor = iminor(inode);
struct i2c_client *client;
struct i2c_adapter *adap;
struct i2c_dev *i2c_dev;
int ret = ; lock_kernel();
i2c_dev = i2c_dev_get_by_minor(minor);
adap = i2c_get_adapter(i2c_dev->adap->nr); client = kzalloc(sizeof(*client), GFP_KERNEL); snprintf(client->name, I2C_NAME_SIZE, "i2c-dev %d", adap->nr);
client->driver = &i2cdev_driver; client->adapter = adap;
file->private_data = client; return ret;
}
(2)i2cdev_read()函数:
* 从file结构的私有数据成员获取i2c_client对象,然后调用i2c_master_recv()函数进行接收数据,最后把数据拷贝到用户空间
static ssize_t i2cdev_read (struct file *file, char __user *buf, size_t count,
loff_t *offset)
{
char *tmp;
int ret; struct i2c_client *client = (struct i2c_client *)file->private_data; if (count > )
count = ; tmp = kmalloc(count,GFP_KERNEL);
if (tmp==NULL)
return -ENOMEM; pr_debug("i2c-dev: i2c-%d reading %zu bytes.\n",
iminor(file->f_path.dentry->d_inode), count); ret = i2c_master_recv(client,tmp,count);
if (ret >= )
ret = copy_to_user(buf,tmp,count)?-EFAULT:ret;
kfree(tmp);
return ret;
}
* i2c_master_recv()函数通过填充i2c_msg结构,然后调用i2c_transfer()来实现传输的。i2c_transfer()则通过调用适配器通信方法master_xfer()将消息发送出去。
int i2c_master_recv(struct i2c_client *client, char *buf ,int count)
{
struct i2c_adapter *adap=client->adapter;
struct i2c_msg msg;
int ret; msg.addr = client->addr;
msg.flags = client->flags & I2C_M_TEN;
msg.flags |= I2C_M_RD;
msg.len = count;
msg.buf = buf; ret = i2c_transfer(adap, &msg, ); /* If everything went ok (i.e. 1 msg transmitted), return #bytes
transmitted, else error code. */
return (ret == ) ? count : ret;
} int i2c_transfer(struct i2c_adapter * adap, struct i2c_msg *msgs, int num)
{
...
ret = adap->algo->master_xfer(adap,msgs,num);
...
}
注:msg.addr表示的设备地址是由client->addr初始化的,而在之前open()方法中并未填充client->addr,所以在应用层打开设备之后并不能立即调用read或者write进行数据传输,需要用ioctl方法设置设备地址。
(3)i2cdev_ioctl()函数:
static long i2cdev_ioctl(struct file *file, unsigned int cmd, unsigned long arg)
{
struct i2c_client *client = (struct i2c_client *)file->private_data;
...
switch ( cmd ) {
case I2C_SLAVE:
case I2C_SLAVE_FORCE:
...
case I2C_TENBIT:
...
case I2C_PEC:
...
case I2C_FUNCS:
...
case I2C_RDWR:
...case I2C_SMBUS:
...case I2C_RETRIES:
...case I2C_TIMEOUT:
...
default:
return -ENOTTY;
}
return ;
}
4. I2C适配器驱动的实现
① 最终目标是要为硬件适配器注册i2c_adapter对象,在注册前需对其成员进行初始化
② 初始化的核心是实现其通信方法,需要一个i2c_algorithm对象并实现其成员方法:master_xfer、sumbus_xfer等
③ 硬件适配器可能属于片上资源,总线驱动的实现可基于platform驱动模型,一般在platform驱动的probe方法中分配、初始化并注册这个i2c_adapter对象
5. S3C2440 I2C适配器驱动分析
① MINI2440的I2C总线驱动位于文件drivers/i2c/busses/i2c-s3c2410.c,由于I2C适配器属于片上资源,驱动的实现采用了platform驱动模型:
static struct platform_driver s3c2440_i2c_driver = {
.probe = s3c24xx_i2c_probe,
.remove = s3c24xx_i2c_remove,
.suspend_late = s3c24xx_i2c_suspend_late,
.resume = s3c24xx_i2c_resume,
.driver = {
.owner = THIS_MODULE,
.name = "s3c2440-i2c",
},
};
static int __init i2c_adap_s3c_init(void)
{
int ret;
ret = platform_driver_register(&s3c2410_i2c_driver);
if (ret == ) {
ret = platform_driver_register(&s3c2440_i2c_driver);
if (ret)
platform_driver_unregister(&s3c2410_i2c_driver);
}
return ret;
}
② s3c24xx_i2c用于描述S3C2440的I2C适配器(在实现一个具体驱动时,要定义一个结构体来描述它,这个结构体往往内嵌一个描述这类驱动的通用成员和一些该驱动所特有的成员)
struct s3c24xx_i2c {
spinlock_t lock;
wait_queue_head_t wait;
unsigned int suspended:;
struct i2c_msg *msg;
unsigned int msg_num;
unsigned int msg_idx;
unsigned int msg_ptr;
unsigned int tx_setup;
unsigned int irq;
enum s3c24xx_i2c_state state;
unsigned long clkrate;
void __iomem *regs;
struct clk *clk;
struct device *dev;
struct resource *ioarea;
struct i2c_adapter adap;
}
③ s3c24xx_i2c_probe 的作用是i2c适配器对象(s3c24xx_i2c )分配、初始化和注册。如前面分析,注册适配器时会遍历I2C总线上的所有驱动,然后调用相应驱动的attach_adapter方法(分配一个i2c_dev结构,并把它注册进全局链表i2c_dev_list,然后在sysfs中注册)。
注:s3c24xx_i2c_probe 最重要的作用是初始化适配器的通信方法s3c24xx_i2c_algorithm
static int s3c24xx_i2c_probe(struct platform_device *pdev)
{
struct s3c24xx_i2c *i2c;
struct s3c2410_platform_i2c *pdata;
struct resource *res;
int ret; pdata = pdev->dev.platform_data; i2c = kzalloc(sizeof(struct s3c24xx_i2c), GFP_KERNEL); strlcpy(i2c->adap.name, "s3c2410-i2c", sizeof(i2c->adap.name));
i2c->adap.owner = THIS_MODULE;
i2c->adap.algo = &s3c24xx_i2c_algorithm;
i2c->adap.retries = ;
i2c->adap.class = I2C_CLASS_HWMON | I2C_CLASS_SPD;
i2c->tx_setup = ; spin_lock_init(&i2c->lock);
init_waitqueue_head(&i2c->wait); /* find the clock and enable it */ i2c->dev = &pdev->dev;
i2c->clk = clk_get(&pdev->dev, "i2c"); clk_enable(i2c->clk); /* map the registers */ res = platform_get_resource(pdev, IORESOURCE_MEM, ); i2c->ioarea = request_mem_region(res->start, (res->end-res->start)+,
pdev->name); i2c->regs = ioremap(res->start, (res->end-res->start)+);
/* setup info block for the i2c core */ i2c->adap.algo_data = i2c;
i2c->adap.dev.parent = &pdev->dev; /* initialise the i2c controller */ ret = s3c24xx_i2c_init(i2c);
/* find the IRQ for this unit (note, this relies on the init call to
* ensure no current IRQs pending
*/ i2c->irq = ret = platform_get_irq(pdev, ); ret = request_irq(i2c->irq, s3c24xx_i2c_irq, IRQF_DISABLED,
dev_name(&pdev->dev), i2c); ret = s3c24xx_i2c_register_cpufreq(i2c);
/* Note, previous versions of the driver used i2c_add_adapter()
* to add the bus at any number. We now pass the bus number via
* the platform data, so if unset it will now default to always
* being bus 0.
*/ i2c->adap.nr = pdata->bus_num; ret = i2c_add_numbered_adapter(&i2c->adap);
...
}
④ S3C2440总线通信方法
(1)S3C2440 I2C总线通信方法:
static const struct i2c_algorithm s3c24xx_i2c_algorithm = {
.master_xfer = s3c24xx_i2c_xfer,
.functionality = s3c24xx_i2c_func,
};
(2)s3c24xx_i2c_xfer()调用函数s3c24xx_i2c_doxfer()进行真正的数据传输
(3)s3c24xx_i2c_doxfer()传输数据的大致流程:
* 记录待传输数据的信息
* 调用s3cc24xx_i2c_enable_irq()使能I2C中断
* 设置I2C传输状态位STATE_START
* 调用s3cc24xx_i2c_message_start()启动本次传输
static int s3c24xx_i2c_doxfer(struct s3c24xx_i2c *i2c, struct i2c_msg *msgs, int num)
{
...
ret = s3c24xx_i2c_set_master(i2c); spin_lock_irq(&i2c->lock); i2c->msg = msgs;
i2c->msg_num = num;
i2c->msg_ptr = ;
i2c->msg_idx = ;
i2c->state = STATE_START; s3c24xx_i2c_enable_irq(i2c);
s3c24xx_i2c_message_start(i2c, msgs);
spin_unlock_irq(&i2c->lock); timeout = wait_event_timeout(i2c->wait, i2c->msg_num == , HZ * );
...
}
(4)启动传输后,调用进程会在等待队列i2c->wait中挂起,接下来的数据传输将由I2C中断处理完成(中断完成后将调用wake_up()唤醒在i2c->wait中挂起的进程)。
(5)s3cc24xx_i2c_message_start()的实现涉及S3C2440 I2C适配器的硬件操作:
* 根据i2c->flags标识设置传输方向
* 使能ACK
* 将i2c->addr记录的设备地址写入IICDS寄存器
* 将IICSTAT寄存器的START/STOP条件置位,启动传输
(6)I2C中断处理程序s3c24xx_i2c_irq是处理传输的核心部分:该函数首先判断总线状态,如果正常,则调用i2s_s3c_irq_nextbyte()
(7)i2s_s3c_irq_nextbyte()中case STATE_START分支即为数据传输部分核心
static int i2s_s3c_irq_nextbyte(struct s3c24xx_i2c *i2c, unsigned long iicstat)
{
unsigned long tmp;
unsigned char byte;
int ret = ; switch (i2c->state) { case STATE_IDLE:
...
case STATE_STOP:
...
case STATE_START:
/* last thing we did was send a start condition on the
* bus, or started a new i2c message
*/ if (iicstat & S3C2410_IICSTAT_LASTBIT &&
!(i2c->msg->flags & I2C_M_IGNORE_NAK)) {
/* ack was not received... */ dev_dbg(i2c->dev, "ack was not received\n");
s3c24xx_i2c_stop(i2c, -ENXIO);
goto out_ack;
} if (i2c->msg->flags & I2C_M_RD)
i2c->state = STATE_READ;
else
i2c->state = STATE_WRITE; /* terminate the transfer if there is nothing to do
* as this is used by the i2c probe to find devices. */ if (is_lastmsg(i2c) && i2c->msg->len == ) {
s3c24xx_i2c_stop(i2c, );
goto out_ack;
} if (i2c->state == STATE_READ)
goto prepare_read; /* fall through to the write state, as we will need to
* send a byte as well */ case STATE_WRITE:
...
case STATE_READ:
/* we have a byte of data in the data register, do
* something with it, and then work out wether we are
* going to do any more read/write
*/ byte = readb(i2c->regs + S3C2410_IICDS);
i2c->msg->buf[i2c->msg_ptr++] = byte; prepare_read:
if (is_msglast(i2c)) {
/* last byte of buffer */ if (is_lastmsg(i2c))
s3c24xx_i2c_disable_ack(i2c); } else if (is_msgend(i2c)) {
/* ok, we've read the entire buffer, see if there
* is anything else we need to do */ if (is_lastmsg(i2c)) {
/* last message, send stop and complete */
dev_dbg(i2c->dev, "READ: Send Stop\n"); s3c24xx_i2c_stop(i2c, );
} else {
/* go to the next transfer */
dev_dbg(i2c->dev, "READ: Next Transfer\n"); i2c->msg_ptr = ;
i2c->msg_idx++;
i2c->msg++;
}
} break;
}
...
}
6. 详细的流程可以参考S3C2440芯片手册的流程图
① Operations for Master/Transmitter Mode
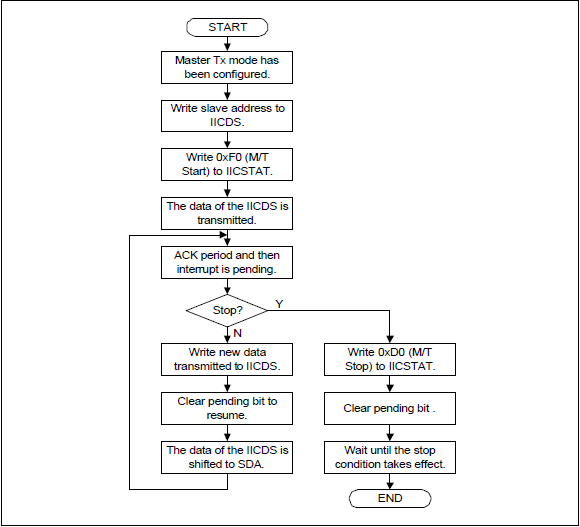
② Operations for Master/Receiver Mode

Linux I2C驱动程序设计的更多相关文章
- linux i2c驱动架构-dm368 i2c驱动分析
linux i2c驱动架构-dm368 i2c驱动分析 在阅读本文最好先熟悉一种i2c设备的驱动程序,并且浏览一下i2c-core.c以及芯片提供商的提供的i2c总线驱动(i2c-davinc ...
- linux驱动基础系列--Linux I2c驱动分析
前言 主要是想对Linux I2c驱动框架有一个整体的把控,因此会忽略协议上的某些细节,同时里面涉及到的一些驱动基础,比如平台驱动.设备模型.sysfs等也不进行详细说明原理,涉及到i2c协议部分也只 ...
- Linux I2C驱动
Linux I2C 驱动结构 i2c体系结构由三部分组成 i2C core i2c core提供了i2c 总线驱动 和 设备驱动的注册,注销方法 i2C and SMBus protocol 实现 i ...
- Linux I2C驱动分析(三)----i2c_dev驱动和应用层分析 【转】
本文转载自:http://blog.chinaunix.net/uid-21558711-id-3959287.html 分类: LINUX 原文地址:Linux I2C驱动分析(三)----i2c_ ...
- Smart210学习记录-----Linux i2c驱动
一:Linux i2c子系统简介: 1.Linux 的 I2C 体系结构分为 3 个组成部分: (1) I2C 核心. I2C 核心提供了 I2C 总线驱动和设备驱动的注册.注销方法,I2C 通信方法 ...
- Linux I2C驱动--用户态驱动简单示例
1. Linux内核支持I2C通用设备驱动(用户态驱动:由应用层实现对硬件的控制可以称之为用户态驱动),实现文件位于drivers/i2c/i2c-dev.c,设备文件为/dev/i2c-0 2. I ...
- 《linux设备驱动开发详解》笔记——15 linux i2c驱动
结合实际代码和书中描述,可能跟书上有一定出入.本文后续芯片相关代码参考ZYNQ. 15.1 总体结构 如下图,i2c驱动分为如下几个重要模块 核心层core,完成i2c总线.设备.驱动模型,对用户提供 ...
- Linux按键驱动程序设计--从简单到不简单【转】
本文转载自:http://blog.csdn.net/coding__madman/article/details/51399353 混杂设备驱动模型: 1. 混杂设备描述 在Linux系统中,存在一 ...
- Linux按键驱动程序设计详解---从简单到不简单【转】
转自:http://blog.csdn.net/coding__madman/article/details/51399353 版权声明:本文为博主原创文章,未经博主允许不得转载. 混杂设备驱动模型: ...
随机推荐
- AngularJS基本使用
简介 AngularJS是Google开源的前端JS结构化框架 Angular关注的是动态展示页面数据, 并与用户进行交互.其主体不再是DOM,而是页面中的动态数据 AngularJS特性(优点) 双 ...
- SQL高性能分页
分页的场景就不多说了,无处不在. 方法一:利用row_number() with C as ( select ROW_NUMBER() over(order by orderdate,orderid) ...
- CodeForces 690C1 Brain Network (easy) (水题,判断树)
题意:给定 n 条边,判断是不是树. 析:水题,判断是不是树,首先是有没有环,这个可以用并查集来判断,然后就是边数等于顶点数减1. 代码如下: #include <bits/stdc++.h&g ...
- 【Linux】GCC编译器
[简介] GCC是Linux下的编译工具集,是GNU Compiler Collection的缩写,包含gcc g++ 等编译器.GCC工具集不仅能编译C/C++语言,其他例如Object-c.Pas ...
- 关于搜索elasticsearch的数据条数大于10000的坑 max_result_window的两种设置方式
当用elasticsearch进行深度分页查询时的size-from大于10000的时候,就会报错“”, 官方推荐是scroll查询返回结果是无序的不满足业务需求,所以还是通过设置最大返回结果数来达到 ...
- ibatis源码学习1_整体设计和核心流程
背景介绍ibatis实现之前,先来看一段jdbc代码: Class.forName("com.mysql.jdbc.Driver"); String url = "jdb ...
- sp_helptext输出错行问题解决
相信,大家对sp_helptext存储过程一定不陌生,它可以帮你快速获取存储过程等对象的定义.但它有一个致命的缺点就是:每行最多返回255个nvarchar类型的字符,假如有一个编写不规范的存储过程, ...
- Spring各个jar包详解
Spring各jar包详解 spring.jar 是包含有完整发布模块的单个jar 包.但是不包括mock.jar,aspects.jar, spring-portlet.jar, and sprin ...
- Cleare userprofile info
$Site = Get-SPSite http://wtcsps99:27841 $ServiceContext = Get-SPServiceContext($Site) $ProfileManag ...
- 当在安卓低版本呈现的界面(H5)出现问题的时候,我们怎么解决?
昨天,在医院现场的客服人员,向我们反馈一个问题:说一位用户用他的安卓手机打开我们的app之后,界面是乱掉的:如下图: 向客服询问了具体的设备信息:安卓系统版本号是4.2 下意识觉得是因为css的兼容问 ...