OpenCV---分水岭算法
推文:
OpenCV学习(7) 分水岭算法(1)(原理简介简单明了)
OpenCV-Python教程:31.分水岭算法对图像进行分割(步骤讲解不错)
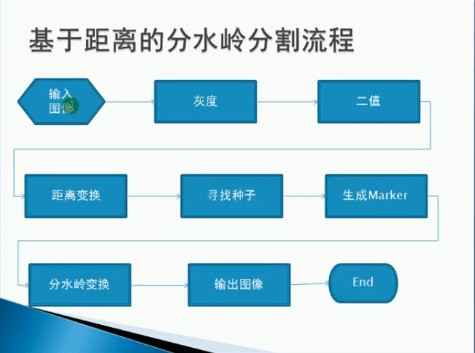
使用分水岭算法进行图像分割
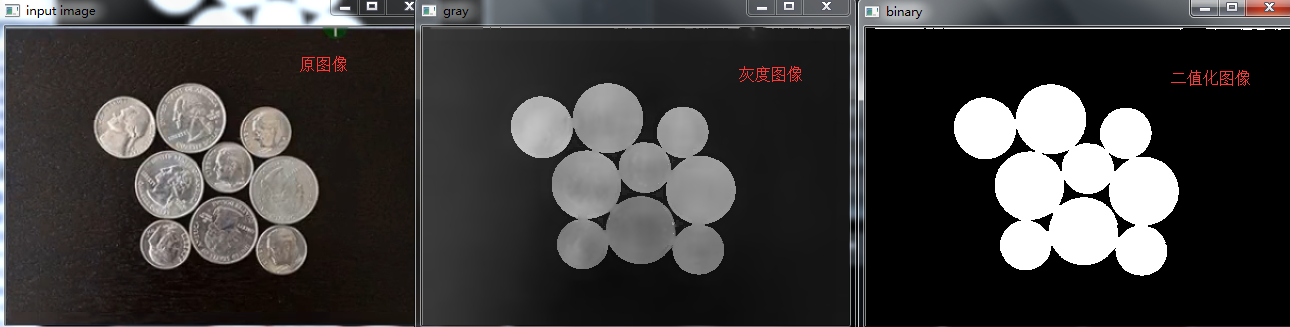
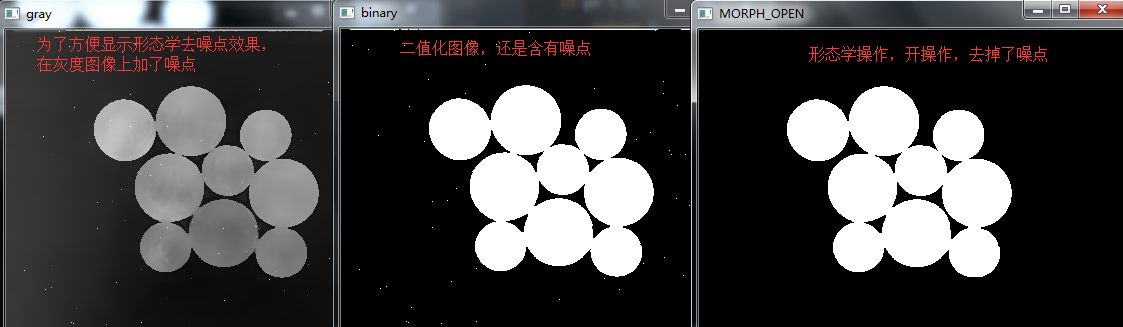
(一)获取灰度图像,二值化图像,进行形态学操作,消除噪点
def watershed_demo(image):
blur = cv.pyrMeanShiftFiltering(image,,)
gray = cv.cvtColor(blur,cv.COLOR_BGR2GRAY) #获取灰度图像
ret,binary = cv.threshold(gray,,,cv.THRESH_BINARY|cv.THRESH_OTSU) #将图像转为黑色和白色部分
cv.imshow("binary",binary) #获取二值化图像
#形态学操作,进一步消除图像中噪点
kernel = cv.getStructuringElement(cv.MORPH_RECT,(,))
mb = cv.morphologyEx(binary,cv.MORPH_OPEN,kernel,iterations=) #iterations连续两次开操作,消除图像的噪点
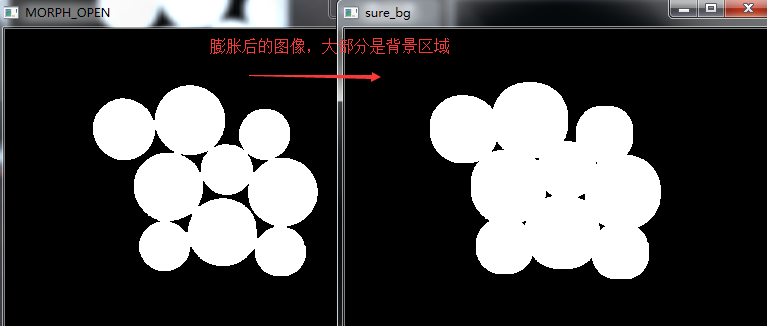
(二)在距离变换前加上一步操作:通过对上面形态学去噪点后的图像,进行膨胀操作,可以得到大部分都是背景的区域(原黑色不是我们需要的部分是背景)
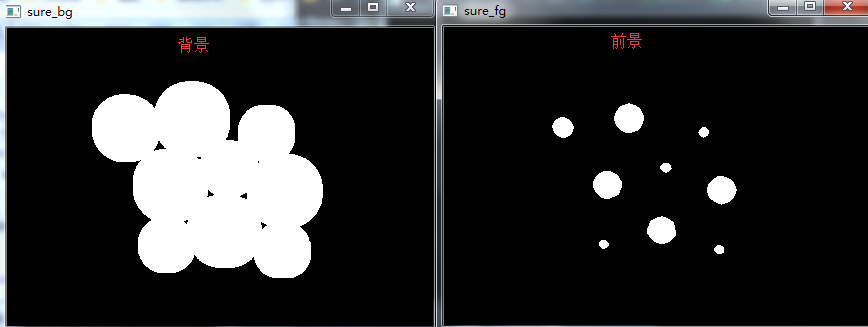
sure_bg = cv.dilate(mb,kernel,iterations=) #3次膨胀,可以获取到大部分都是背景的区域
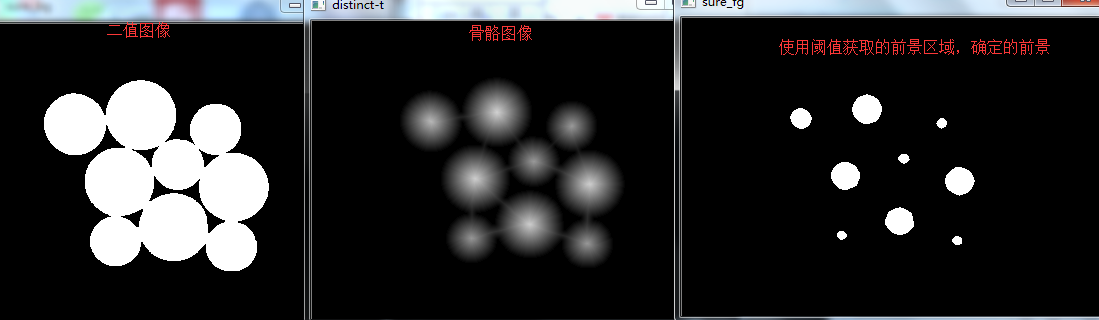
(三)使用距离变换distanceTransform获取确定的前景色
根据distanceTransform获取距离背景最小距离的结果(详细看下面相关知识补充)
根据distanceTransform操作的结果,设置一个阈值,使用threshold决定哪些区域是前景,这样得到正确结果的概率很高
dist = cv.distanceTransform(mb,cv.DIST_L2,) #获取距离数据结果
ret, sure_fg = cv.threshold(dist,dist.max()*0.6,,cv.THRESH_BINARY) #获取前景色
相关知识补充(重点)
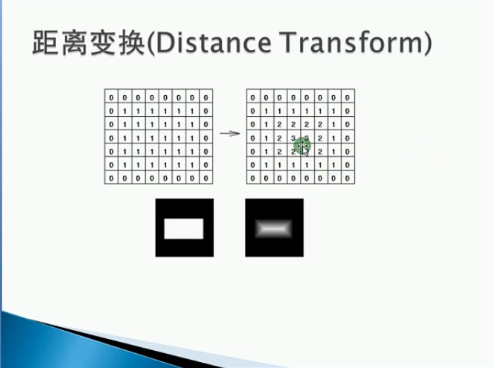
(1)距离变换原理
推文:图像识别中距离变换的原理及作用详解,并附用OpenCV中的distanceTransform实现距离变换的代码!(距离变换的定义讲得不错)
距离变换的处理图像通常都是二值图像,而二值图像其实就是把图像分为两部分,即背景和物体两部分,物体通常又称为前景目标!
通常我们把前景目标的灰度值设为255,即白色
背景的灰度值设为0,即黑色。
所以定义中的非零像素点即为前景目标,零像素点即为背景。
所以图像中前景目标中的像素点距离背景越远,那么距离就越大,如果我们用这个距离值替换像素值,那么新生成的图像中这个点越亮。
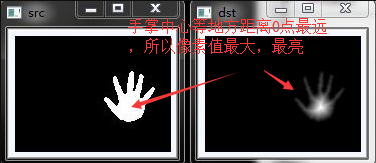
再通过设定合理的阈值对距离变换后的图像进行二值化处理,则可得到去除手指的图像(如下图“bidist”窗口图像所示),手掌重心即为该图像的几何中心。

主要用于计算非零像素到最近零像素点的最短距离。一般用于求解图像的骨骼
def distanceTransform(src, distanceType, maskSize, dst=None, dstType=None): # real signature unknown; restored from __doc__
src:输入的图像,一般为二值图像
distanceType:所用的求解距离的类型,有CV_DIST_L1, CV_DIST_L2 , or CV_DIST_C
mask_size:距离变换掩模的大小,可以是 或 . 对 CV_DIST_L1 或 CV_DIST_C 的情况,参数值被强制设定为 , 因为 × mask 给出 × mask 一样的结果,而且速度还更快。
(3)若是想骨骼显示(对我们的分水岭流程无影响),我们需要对distanceTransform返回的结果进行归一化处理,使用normalize
因为distanceTransform返回的图像数据是浮点数值,要想在浮点数表示的颜色空间中,数值范围必须是0-1.0,所以要将其中的数值进行归一化处理
(重点)在整数表示的颜色空间中,数值范围是0-255,但在浮点数表示的颜色空间中,数值范围是0-1.0,所以要把0-255归一化。
顺便补充:若是不做归一化处理,数值大于1的都会变为1.0处理
mb = cv.morphologyEx(binary,cv.MORPH_OPEN,kernel,iterations=) #iterations连续两次开操作
cv.imshow("mb", mb) #这是我们形态学开操作过滤噪点后的图像,暂时可以看做源图像
#距离变换
dist = cv.distanceTransform(mb,cv.DIST_L2,) #这是我们获取的字段距离数值,对应每个像素都有,所以数组结构和图像数组一致
cv.imshow("dist",dist)
dist_output = cv.normalize(dist,,1.0,cv.NORM_MINMAX) #归一化的距离图像数组
cv.imshow("distinct-t",dist_output*50)
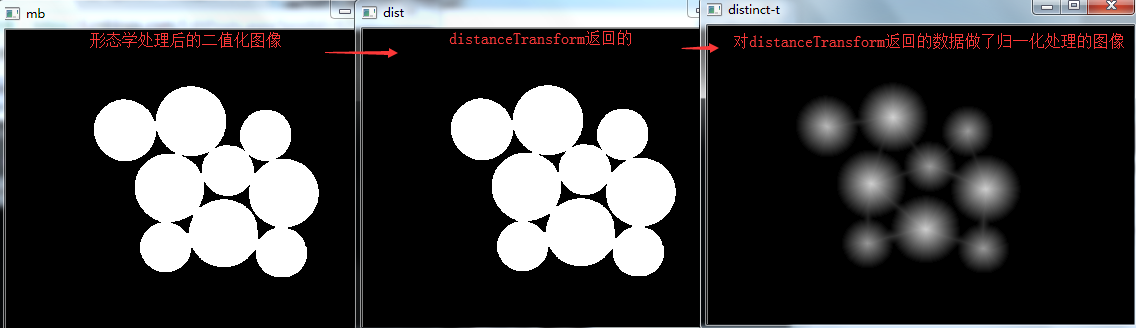
发现了似乎distanceTransform返回的图像和源图像一样,似乎出错了
原因:因为distanceTransform返回的是浮点型色彩空间,而dist中存放的数距离0值的最小距离,大多是大于1.0的数值,
而上面提到浮点型色彩空间数值范围0-1.0,当数值大于1.0都会被设置为1.0,显示白色,所以和原来的二值化图像一致,
我们要想显示骨骼,必须先进行归一化处理
下面是从二值化图像源,distanceTransform距离数组,和归一化距离数组中获取的一段像素数组
print(mb[][:])
print(dist[][:])
print(dist_output[][:])
整数型色彩空间二值化图像
[
]
浮点型色彩空间最小距离数组,由于数值大于1.0都会被设置为1.0,所以和上面二值化图像一致
[ . . . . . . .
. . . 1.4 2.1969 3.1969 4.1969
5.1969 6.1969 7.1969 8.196899 9.196899 10.187599]
浮点型色彩空间归一化数组图像,显示骨骼
[. . . . . .
. . . 0.00047065 0.0006589 0.00103396
0.00150461 0.00197525 0.00244589 0.00291654 0.00338719 0.00385783
0.00432847 0.00479474]
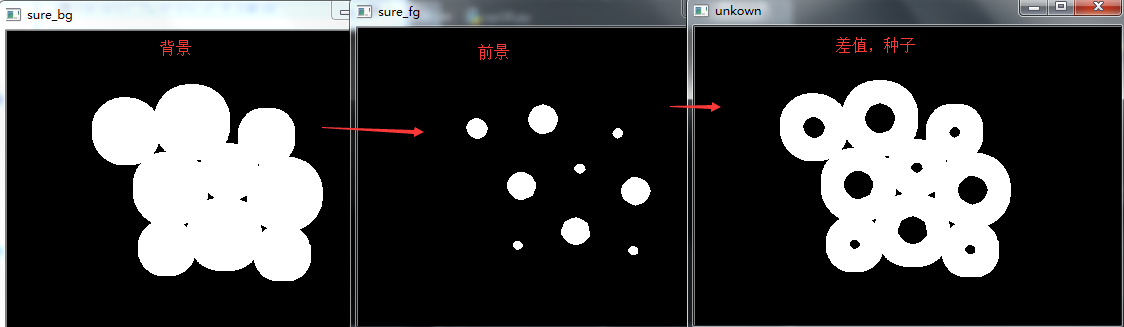
(四)在获取了背景区域和前景区域(其实前景区域是我们的种子,我们将从这里进行灌水,向四周涨水,但是这个需要在markers中表示)后,这两个区域中有未重合部分(注1)怎么办?首先确定这些区域(寻找种子)
注1:
这里是求取硬币偏白色,使用THRESH_BINARY,所以我们获取对象是白色区域,是获取未重合部分
若是我们求取树叶等偏黑,需要使用THRESH_BINARY_INV,此时我们获取的对象是黑色区域,就变为了获取重合部分了
开始获取未知区域unknown(栅栏会创建在这一区域),为下一步获取种子做准备
surface_fg = np.uint8(sure_fg) #保持色彩空间一致才能进行运算,现在是背景空间为整型空间,前景为浮点型空间,所以进行转换
unknown = cv.subtract(sure_bg,surface_fg)
cv.imshow("unkown",unknown)
使用print查看背景前景色彩空间不同
print(sure_fg[][:])
print(sure_bg[][:])
---------------------------------------
[. . . . . . . . . . . . . . . . . . . .]
[
]
(五)获取了这些区域,我们可以获取种子,这是通过connectedComponents实现,获取masker标签,确定的前景区域会在其中显示为以1开始的数据,这就是我们的种子,会从这里开始漫水
推文:http://m.imooc.com/article/32675
推文:基于矩阵实现的Connected Components算法
利用connectedComponents求图中的连通图
重点:
现在知道了那些是背景那些是硬币(确定的前景区域)了。
那我们就可以创建标签(一个与原图像大小相同,数据类型为 in32 的数组),并标记其中的区域了。
对我们已经确定分类的区域(无论是前景还是背景)使用不同的正整数标记,对我们不确定的区域(unknown区域)使用 0 标记。
我们可以使用函数 cv2.connectedComponents()来做这件事。
它会把对标签进行操作,将背景标记为 0,其他的对象使用从 1 开始的正整数标记(其实这就是我们的种子,水漫时会从这里漫出)。然后将这个标签返回给我们markers
但是,我们知道如果背景标记为 0,那分水岭算法就会把它当成未知区域了。(我们要将未知区域标记为0,所以我们要将背景区域变为其他整数,例如+1)
所以我们想使用不同的整数标记它们。
而对不确定的区域(函数cv2.connectedComponents 输出的结果中使用 unknown 定义未知区域)标记为 。
#获取mask
ret,markers = cv.connectedComponents(surface_fg)
函数原型:
def connectedComponents(image, labels=None, connectivity=None, ltype=None): # real signature unknown; restored from __doc__
参数:
参数image是需要进行连通域处理的二值图像,其他的这里用不到
返回值:
ret是连通域处理的边缘条数,是上面提到的确定区域(出去背景外的其他确定区域:就是前景),就是种子数,我们会从种子开始向外涨水
markers是我们创建的一个标签(一个与原图像大小相同,数据类型为 in32 的数组),其中包含有我们原图像的确认区域的数据(前景区域)
查看部分markers:(0代表的是背景色,)
[ 0 #0是我们的背景区域
2 #像这些以1开始的整数就是我们确定的前景区域,就是我们要找的种子
]
(六)根据未知区域unknown在markers中设置栅栏,并将背景区域加入种子区域,一起漫水
注意:
watershed漫水算法需要我们将栅栏区域设置为0,所以我们需要将markers中背景区域(原来为0,会干扰算法)设置为其他整数。
解决方法将markers整体加一 #此时种子区域不止我们原来的前景区域,有增加了一个背景区域,我们将从这些区域一起灌水
markers = markers +
markers[unknown==] =
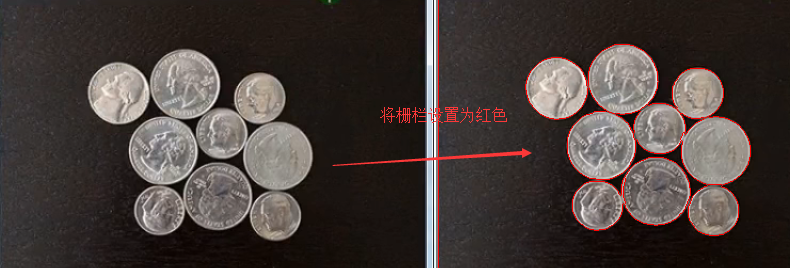
(七)根据种子开始漫水,让水漫起来找到最后的漫出点(栅栏边界),越过这个点后各个山谷中水开始合并。注意watershed会将找到的栅栏在markers中设置为-1
markers = cv.watershed(image,markers=markers) #获取栅栏
image[markers==-] = [,,] #根据栅栏,我们对原图像进行操作,对栅栏区域设置为红色
markers再次查看
[-
- - - - - - -1 #漫水算法会将找到的栅栏设置为-1
- - - -
-
-
-]
(八)结果查看
(九)全部代码
import cv2 as cv
import numpy as np def watershed_demo(image):
blur = cv.pyrMeanShiftFiltering(image,,)
gray = cv.cvtColor(blur,cv.COLOR_BGR2GRAY) #获取灰度图像 ret,binary = cv.threshold(gray,,,cv.THRESH_BINARY|cv.THRESH_OTSU)
#形态学操作,进一步消除图像中噪点
kernel = cv.getStructuringElement(cv.MORPH_RECT,(,))
mb = cv.morphologyEx(binary,cv.MORPH_OPEN,kernel,iterations=) #iterations连续两次开操作
sure_bg = cv.dilate(mb,kernel,iterations=) #3次膨胀,可以获取到大部分都是背景的区域
cv.imshow("sure_bg",sure_bg)
#距离变换
dist = cv.distanceTransform(mb,cv.DIST_L2,)
cv.imshow("dist",dist)
dist_output = cv.normalize(dist,,1.0,cv.NORM_MINMAX)
# print(mb[][:])
# print(dist[][:])
# print(dist_output[][:])
cv.imshow("distinct-t",dist_output*)
ret, sure_fg = cv.threshold(dist,dist.max()*0.6,,cv.THRESH_BINARY)
cv.imshow("sure_fg",sure_fg)
# print(sure_fg[][:])
# print(sure_bg[][:])
#获取未知区域
surface_fg = np.uint8(sure_fg) #保持色彩空间一致才能进行运算,现在是背景空间为整型空间,前景为浮点型空间,所以进行转换
unknown = cv.subtract(sure_bg,surface_fg)
cv.imshow("unkown",unknown)
#获取maskers,在markers中含有种子区域
ret,markers = cv.connectedComponents(surface_fg)
#print(ret) #分水岭变换
markers = markers +
markers[unknown==] = markers = cv.watershed(image,markers=markers)
image[markers==-] = [,,] cv.imshow("result",image) src = cv.imread("./c.png") #读取图片
cv.namedWindow("input image",cv.WINDOW_AUTOSIZE) #创建GUI窗口,形式为自适应
cv.imshow("input image",src) #通过名字将图像和窗口联系 watershed_demo(src) cv.waitKey() #等待用户操作,里面等待参数是毫秒,我们填写0,代表是永远,等待用户操作
cv.destroyAllWindows() #销毁所有窗口
OpenCV---分水岭算法的更多相关文章
- Opencv分水岭算法——watershed自动图像分割用法
分水岭算法是一种图像区域分割法,在分割的过程中,它会把跟临近像素间的相似性作为重要的参考依据,从而将在空间位置上相近并且灰度值相近的像素点互相连接起来构成一个封闭的轮廓,封闭性是分水岭算法的一个重要特 ...
- opencv分水岭算法对图像进行切割
先看效果 说明 使用分水岭算法对图像进行切割,设置一个标记图像能达到比較好的效果,还能防止过度切割. 1.这里首先对阈值化的二值图像进行腐蚀,去掉小的白色区域,得到图像的前景区域.并对前景区域用255 ...
- OpenCV——分水岭算法
分水岭算法,是一种基于拓扑理论的数学形态学的分割方法,其基本思想是把图像看作是测地学上的拓扑地貌,图像中每一点像素的灰度值表示该点的海拔高度,每一个局部极小值及其影响区域称为集水盆,而集水盆的边界则形 ...
- OpenCV学习(9) 分水岭算法(3)
本教程我学习一下opencv中分水岭算法的具体实现方式. 原始图像和Mark图像,它们的大小都是32*32,分水岭算法的结果是得到两个连通域的轮廓图. 原始图像:(原始图像必须是3通道图像) Mark ...
- OpenCV学习(8) 分水岭算法(2)
现在我们看看OpenCV中如何使用分水岭算法. 首先我们打开一副图像: // 打开另一幅图像 cv::Mat image= cv::imread("../to ...
- opencv学习之路(30)、分水岭算法及图像修补
一.简介 二.分水岭算法 #include "opencv2/opencv.hpp" using namespace cv; void main() { Mat srcImg = ...
- OpenCV 学习笔记 04 深度估计与分割——GrabCut算法与分水岭算法
1 使用普通摄像头进行深度估计 1.1 深度估计原理 这里会用到几何学中的极几何(Epipolar Geometry),它属于立体视觉(stereo vision)几何学,立体视觉是计算机视觉的一个分 ...
- 分水岭算法(理论+opencv实现)
分水岭算法理论 从意思上就知道通过用水来进行分类,学术上说什么基于拓扑结构的形态学...其实就是根据把图像比作一副地貌,然后通过最低点和最高点去分类! 原始的分水岭: 就是上面说的方式,接下来用一幅图 ...
- OpenCV学习(7) 分水岭算法(1)
分水岭算法主要用于图像分段,通常是把一副彩色图像灰度化,然后再求梯度图,最后在梯度图的基础上进行分水岭算法,求得分段图像的边缘线. 下面左边的灰度图,可以描述为右边的地 ...
- 第八节、图片分割之GrabCut算法、分水岭算法
所谓图像分割指的是根据灰度.颜色.纹理和形状等特征把图像划分成若干互不交迭的区域,并使这些特征在同一区域内呈现出相似性,而在不同区域间呈现出明显的差异性.我们先对目前主要的图像分割方法做个概述,后面再 ...
随机推荐
- $_SERVER['SCRIPT_FILENAME'] 与 __FILE__ 区别
PHP $_SERVER['SCRIPT_FILENAME'] 与 __FILE__ 的区别 PHP $_SERVER['SCRIPT_FILENAME'] 与 __FILE__ 通常情况下,PHP ...
- asp.net如何实现跟踪检查用户知否查看了邮件。
有时我们有这样一种需求场景,我们给很多用户发了邮件,需要一个反馈,用户是否查看了我们发送的邮件,百度了以下果然有方案. 我总结实践了下这个过程,同时有自己的一点使用感受.记录下希望对你有帮助. 有人想 ...
- 常用IDE插件
Visual Studio 常用 Refactoring Essentials:代码重构分析 Roslynator:代码重构 CodeMaid:代码格式化 Github Extension for V ...
- 第二章 script元素
<script>元素 async:可选.表示应该立即下载脚本,但不应妨碍页面中的其他操作,比如下载其他资源或等待加载其他脚本.只对外部脚本文件有效. charset:可选.表示通过 ...
- 转 使用Docker部署 spring-boot maven应用
转自:https://blog.csdn.net/u011699931/article/details/70226504/ 使用Docker部署 spring-boot maven应用 部署过程分为以 ...
- 【beta】视频预发布
beta阶段视频发布地址: 秒拍: http://www.miaopai.com/show/Ivh31LgnAuWELxboH6gl7g__.htm
- mysql导出/导入表结构以及表数据
导出: 命令行下具体用法如下: mysqldump -u用戶名 -p密码 -d 数据库名 表名 脚本名; 1.导出数据库为dbname的表结构(其中用戶名为root,密码为dbpasswd,生成的脚 ...
- 通过父类定位到子类 先将父类当作一个dom
通过父类定位到子类 先将父类当作一个dom 在此基础上在定位子类
- ZOJ3466-The Hive II
题意 有一个六边形格子,共 \(n\) 行,每行有 8 个位置,有一些格子不能走.求用一些环覆盖所有可走格子的方案数.\(n\le 10\) . 分析 插头dp,只不过是六边形上的,分奇数列和偶数列讨 ...
- bzoj4639 博士的选取器
题意 给出一个长度为n的正整数序列,要求把它划分成若干个连续的区间,使得每个区间的数字之和都不超过给定的lim.最后的代价等于每个区间的最大值之和.求最小代价.n<=300000 分析 定义f[ ...