PID控制器开发笔记之十三:单神经元PID控制器的实现
神经网络是模拟人脑思维方式的数学模型。神经网络是智能控制的一个重要分支,人们针对控制过程提供了各种实现方式,在本节我们主要讨论一下采用单神经元实现PID控制器的方式。
1、单神经元的基本原理
单神经元作为构成神经网络的基本单位,具有自学习和自适应能力,且结构简单而易于计算。接下来我们讨论一下单神经元模型的基本原理。
(1)、单神经元模型
所谓单神经元模型,是对人脑神经元进行抽象简化后得到一种称为McCulloch-Pitts模型的人工神经元,如下图所示。
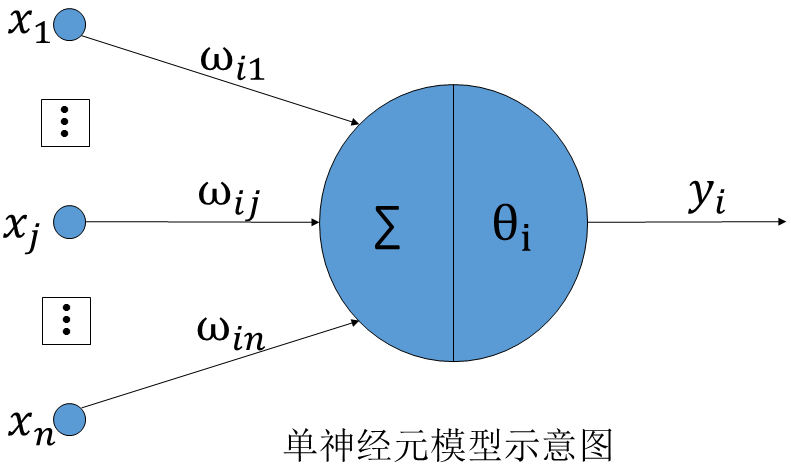
根据上图所示,对于第i个神经元,x1、x2、……、xN是神经元接收到的信息,ω1、ω2、……、ωN为连接强度,又称之为权。采用某种运算方式把输入信号的作用结合起来,得到他们总的结果,称之为“净输入”通常用neti表示。根据所采用的运算方式的不同,净输入有不同的表示形式,比较常用的是线性加权求和,其表达式如下:

其中,θi是神经元i的阈值。
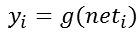
而神经元i的输出yi可以表示为其当前状态的函数,这个函数我们称之为激活函数。一般表示如下:
(2)、采用的学习规则
学习是神经网络的基本特征,而学习规则是实现学习过程的基本手段。学习规则主要实现对神经元之间连接强度的修正,即修改加权值。而学习过程可分为有监督学习和无监督学习两类。它们的区别简单的说,就是是否引入期望输出参与学习过程,引入了则称之为有督导学习。较为常用的学习规则有三种:
a、无监督Hebb学习规则
Hebb学习是一类相关学习,它的基本思想是:如果神经元同时兴奋,则它们之间的连接强度的增强与它们的激励的乘积成正比。以Oi表示单元i的激活值,以Oj表示单元j的激活值,以ωij表示单元j到单元i的连接强度,则Hebb学习规则可用下式表示:

b、有监督Delta学习规则
在Hebb学习规则中,引入教师信号,将式Oj换成网络期望目标输出dj和网络实际输出Oj之差,即为有监督Delta学习规则,即:

c、有监督Hebb学习规则
将无监督Hebb学习规则和有监督Delta学习规则两者结合起来,就组成有监督Hebb学习规则,即:

在以上各式中,η称之为学习速度。
2、单神经元PID的基本原理
在前面我们说明了单神经元的基本原理,接下来我们讨论如何将其应用的PID控制中。前面我们已经知道了神经元的输入输出关系,在这里我们考虑PID算法的增量型表达式:

若是我们记:x1(k)=err(k),x2(k)=err(k)- err(k-1),x3(k)=err(k)- 2err(k-1)+err(k-2),同时将比例、积分、微分系数看作是它们对应的加权,并记为ωi(k)。同时我们引进一个比例系数K,则可将PID算法的增量型公式改为:
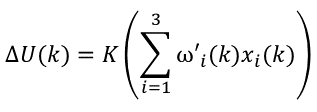
其中,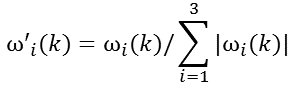
我们将PID的增量公式已经改为单神经元的输入输出表达形式,还需要引进相应的学习规则就可以得到单神经元PID控制器了。在这里我们采用有监督Hebb学习规则于是可以得到学习过程:

从学习规则的定义,我们知道在上式中,Z(k)= err(k)。而U(k)= U(k-1)+∆U(k),ω(k)= ω(k-1)+∆ω(k)。到这里实际上已经得到了单神经元PID的算法描述。
3、单神经元PID的软件实现
有了前面的准备,我们就可以开始编写基于单神经元的PID控制程序了。首先依然是定义一个单神经元的PID结构体:
/*定义结构体和公用体*/
typedef struct
{
float setpoint; /*设定值*/
float kcoef; /*神经元输出比例*/
float kp; /*比例学习速度*/
float ki; /*积分学习速度*/
float kd; /*微分学习速度*/
float lasterror; /*前一拍偏差*/
float preerror; /*前两拍偏差*/
float deadband; /*死区*/
float result; /*输出值*/
float output; /*百分比输出值*/
float maximum; /*输出值的上限*/
float minimum; /*输出值的下限*/
float wp; /*比例加权系数*/
float wi; /*积分加权系数*/
float wd; /*微分加权系数*/
}NEURALPID;
接下来在使用PID对象之前依然需要对它进行初始化操作,以保证在未修改参数的值之前,PID对象也是可用的。这部分初始化比较简单,与前面的各类PID对象的初始化类似。
/* 单神经元PID初始化操作,需在对vPID对象的值进行修改前完成 */
/* NEURALPID vPID,单神经元PID对象变量,实现数据交换与保存 */
/* float vMax,float vMin,过程变量的最大最小值(量程范围) */
void NeuralPIDInitialization(NEURALPID *vPID,float vMax,float vMin)
{
vPID->setpoint=vMin; /*设定值*/
vPID->kcoef=0.12; /*神经元输出比例*/
vPID->kp=0.4; /*比例学习速度*/
vPID->ki=0.35; /*积分学习速度*/
vPID->kd=0.4; /*微分学习速度*/
vPID->lasterror=0.0; /*前一拍偏差*/
vPID->preerror=0.0; /*前两拍偏差*/
vPID->result=vMin; /*PID控制器结果*/
vPID->output=0.0; /*输出值,百分比*/
vPID->maximum=vMax; /*输出值上限*/
vPID->minimum=vMin; /*输出值下限*/
vPID->deadband=(vMax-vMin)*0.0005; /*死区*/
vPID->wp=0.10; /*比例加权系数*/
vPID->wi=0.10; /*积分加权系数*/
vPID->wd=0.10; /*微分加权系数*/
}
初始化之后,我们就可以调用该对象进行单神经元PID调节了。前面我们已经描述过算法,下面我们来实现它:
/* 神经网络参数自整定PID控制器,以增量型方式实现 */
/* NEURALPID vPID,神经网络PID对象变量,实现数据交换与保存 */
/* float pv,过程测量值,对象响应的测量数据,用于控制反馈 */
void NeuralPID(NEURALPID *vPID,float pv)
{
float x[];
float w[];
float sabs
float error;
float result;
float deltaResult;
error=vPID->setpoint-pv;
result=vPID->result;
if(fabs(error)>vPID->deadband)
{
x[]=error;
x[]=error-vPID->lasterror;
x[]=error-vPID->lasterror*+vPID->preerror;
sabs=fabs(vPID->wi)+fabs(vPID->wp)+fabs(vPID->wd);
w[]=vPID->wi/sabs;
w[]=vPID->wp/sabs;
w[]=vPID->wd/sabs;
deltaResult=(w[]*x[]+w[]*x[]+w[]*x[])*vPID->kcoef;
}
else
{
deltaResult=;
}
result=result+deltaResult;
if(result>vPID->maximum)
{
result=vPID->maximum;
}
if(result<vPID->minimum)
{
result=vPID->minimum;
}
vPID->result=result;
vPID->output=(vPID->result-vPID->minimum)*/(vPID->maximum-vPID->minimum);
//单神经元学习
NeureLearningRules(vPID,error,result,x);
vPID->preerror=vPID->lasterror;
vPID->lasterror=error;
}
前面的算法分析中,我们就是将增量型PID算法的表达式转化为单神经元PID公式的。二者最根本的区别在于单神经元的学习规则算法,我们采用了有监督Hebb学习规则来实现。
/*单神经元学习规则函数*/
static void NeureLearningRules(NEURALPID *vPID,float zk,float uk,float *xi)
{
vPID->wi=vPID->wi+vPID->ki*zk*uk*xi[];
vPID->wp=vPID->wp+vPID->kp*zk*uk*xi[];
vPID->wd=vPID->wd+vPID->kd*zk*uk*xi[];
}
至此,单神经元PID算法就实现了,当然有很多进一步优化的方式,都是对学习规则算法的改进,因为改进了学习规则,自然就改进了单神经元PID算法。
4、单神经元PID总结
前面我们已经分析并实现了单神经元PID控制器,在本节我们来对它做一个简单的总结。
与普通的PID控制器一样,参数的选择对调节的效果有很大影响。对单神经元PID控制器来说,主要是4个参数:K、ηp、ηi、ηd,我们总结一下相关参数选取的一般规律。
(1)对连接强度(权重ω)初始值的选择并无特殊要求。
(2)对阶跃输入,若输出有大的超调,且多次出现正弦衰减现象,应减少增益系数K,维持学习速率ηp、ηi、ηd不变。若上升时间长,而且无超调,应增大增益系数K以及学习速率ηp、ηi、ηd。
(3)对阶跃输入,若被控对象产生多次正弦衰减现象,应减少比例学习速率ηp,而其它参数保持不变。
(4)若被控对象响应特性出现上升时间短,有过大超调,应减少积分学习速率ηi,而其它参数保持不变。
(5)若被控对象上升时间长,增大积分学习速率ηi又会导致超调过大,可适当增加比例学习速率ηp,而其它参数保持不变。
(6)在开始调整时,微分学习速率ηd应选择较小值,在调整比例学习速率ηp、积分学习速率ηi和增益系数K使被控对象达到较好特性后,再逐渐增加微分学习速率ηd,而其它参数保持不变。
(7)K是系统最敏感的参数,K值的变化相当于P、I、D三项同时变化。应在开始时首先调整K,然后再根据需要调整学习速率。
在单神经元PID控制器中,上述这些参数对调节效果的影响如何呢?一般情况下具有如下规律。
(1)在积分学习率、微分学习率不变的情况下,比例系数学习率越大则超调量越小,但是响应速度也会越慢;
(2)在比例学习率、微分学习率不变的情况下,积分系数学习率越大则响应会越快,但是超调量也会越大。
(3)在比例学习率、积分学习率不变的情况下,微分学习率对单神经元PID控制器的控制效果影响不大。
最后我们需要明白,单神经元PID算法是利用单神经元的学习特性,来智能的调整PID控制过程。单神经元可以实现自学习,这正好可以弥补传统PID算法的不足。正如前面所说,学习是它的最大特点,那么不同的学习算法对其性能的影响会很大,所以改进学习规则算法对提高性能有很大帮助。
欢迎关注:

PID控制器开发笔记之十三:单神经元PID控制器的实现的更多相关文章
- PID控制器开发笔记之十一:专家PID控制器的实现
前面我们讨论了经典的数字PID控制算法及其常见的改进与补偿算法,基本已经覆盖了无模型和简单模型PID控制经典算法的大部.再接下来的我们将讨论智能PID控制,智能PID控制不同于常规意义下的智能控制,是 ...
- PID控制器开发笔记之七:微分先行PID控制器的实现
前面已经实现了各种的PID算法,然而在某些给定值频繁且大幅变化的场合,微分项常常会引起系统的振荡.为了适应这种给定值频繁变化的场合,人们设计了微分先行算法. 1.微分先行算法的思想 微分先行PID控制 ...
- PID控制器开发笔记之五:变积分PID控制器的实现
在普通的PID控制算法中,由于积分系数Ki是常数,所以在整个控制过程中,积分增量是不变的.然而,系统对于积分项的要求是,系统偏差大时,积分作用应该减弱甚至是全无,而在偏差小时,则应该加强.积分系数取大 ...
- PID控制器开发笔记之四:梯形积分PID控制器的实现
从微积分的基本原理看,积分的实现是在无限细分的情况下进行的矩形加和计算.但是在离散状态下,时间间隔已经足够大,矩形积分在某些时候显得精度要低了一些,于是梯形积分被提出来以提升积分精度. 1.梯形积分基 ...
- PID控制器开发笔记(转)
源: PID控制器开发笔记
- PID控制器开发笔记之八:带死区的PID控制器的实现
在计算机控制系统中,由于系统特性和计算精度等问题,致使系统偏差总是存在,系统总是频繁动作不能稳定.为了解决这种情况,我们可以引入带死区的PID算法. 1.带死区PID的基本思想 带死区的PID控制算法 ...
- PID控制器开发笔记之二:积分分离PID控制器的实现
前面的文章中,我们已经讲述了PID控制器的实现,包括位置型PID控制器和增量型PID控制器.但这个实现只是最基本的实现,并没有考虑任何的干扰情况.在本节及后续的一些章节,我们就来讨论一下经典PID控制 ...
- PID控制器开发笔记之一:PID算法原理及基本实现
在自动控制中,PID及其衍生出来的算法是应用最广的算法之一.各个做自动控制的厂家基本都有会实现这一经典算法.我们在做项目的过程中,也时常会遇到类似的需求,所以就想实现这一算法以适用于更多的应用场景. ...
- Java开发笔记(十三)利用关系运算符比较大小
前面在<Java开发笔记(九)赋值运算符及其演化>中提到,Java编程中的等号“=”表示赋值操作,并非数学上的等式涵义.Java通过等式符号“==”表示左右两边相等,对应数学的等号“=”: ...
随机推荐
- Neutron flat network 学习
flat network 是不带 tag 的网络,要求宿主机的物理网卡直接与 linux bridge 连接,这意味着: 每个 flat network 都会独占一个物理网卡. 在 ML2 配置中 ...
- photoshop快速把新照片制作成老照片教学
原图 步骤1 在photoshop中找开需要处理的图片,Ctrl+J复制图片,得到图片1. 步骤2 单击图层面板底部的创建新的填充或调整图层图标,添加色调/饱和度调整图层.调整它的饱合度和明度. 步骤 ...
- hMailServer配置图文详细教程
https://www.hmailserver.org/viewtopic.php?f=4&t=6
- java多线程2
今日大部分时间花在了C语言的链表上了,以下是我今日所学习的java多线程内容,今天学习的是多线程里的其他命令,wait,notify,nofityAll,分别是等待,唤醒,全部唤醒. 附今日敲的代码: ...
- Python——Flask框架——程序的结构
一.项目结构 |-flasky |-app Flask程序一般都保存在这里 |-templates/ |-static/ |main/ |-__init__.py |-errors.py |-form ...
- redis - Sentinel 和 cluster
redis哨兵集群 引入 上回说到redis主从同步时,master(主库)如果宕机了怎么解决... 我给出了一个手动解决的办法! 但实际上,如果你配置了Sentinel,它能自动发现master宕机 ...
- [SCOI2006] 数字立方体
题目类型:三维前缀和+同余方程 传送门:>Here< 题意:给出一个立方体,求有多少个子立方体的和为\(k\)的倍数 解题思路 暴力做法:\(O(n^6)\)枚举子立方体 考虑只枚举长和宽 ...
- POM文件分析记
pom英文全称:project object model 1.简介 pom.xml文件描述了maven项目的基本信息,比如groupId,artifactId,version等.也可以对maven项目 ...
- Security+认证812分轻松考过(备战分享)
2019.02.12,开工第一天,我参加了security+考试并顺利通过了考试,812分的成绩有点出乎我的意料,据我所知我周围还没有人考过800分的.怀着愉悦的心态分享下我的备考经历和考试经验. 备 ...
- redis简单命令总结
1.连接到redis服务器:redis-cli -h 127.0.0.1 -p 6379 -a 密码 select index 切换 redis 数据库 flushdb 删除当前数据库所有的 key ...