ROS kinetic + Realsens D435i + ORK + LINEMOD 物体识别
1. ORK
网址:https://wg-perception.github.io/object_recognition_core/
ORK (Object Recognition Kitchen) 是 ROS 集成的物体识别库,当前 Kinetic 版本的 ROS 只集成了部分功能包的二进制安装文件,所以需通过源码编译安装。
- 安装依赖库
sudo apt-get install meshlab
sudo apt-get install libosmesa6-dev
sudo apt-get install python-pyside.qtcore
sudo apt-get install python-pyside.qtgui
- 创建工作空间,下载功能包源码,编译
mkdir ork_ws && cd ork_ws
wstool init src https://raw.github.com/wg-perception/object_recognition_core/master/doc/source/ork.rosinstall.kinetic.plus
cd src && wstool update -j8
cd .. && rosdep install --from-paths src -i -y
catkin_make
- 设置环境变量
echo "export ~/ork_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
2. CouchDB 建立模型库
ORK 中的 LINEMOD 算法基于模板匹配,需要建立已知物体的数据模型,根据采集的信息逐一匹配,找到与数据库中匹配的物体。首先,用 CouchDB 工具创建数据库:
- 安装
sudo apt-get install couchdb
- 测试是否安装成功,如图所示,说明安装成功
curl -X GET http://localhost:5984

- 在数据库中创建一条可乐罐模型的数据
rosrun object_recognition_core object_add.py -n "coke " -d "A universal can of coke" --commit
- 浏览器中查看 http://localhost:5984/_utils/database.html?object_recognition/_design/objects/_view/by_object_name,复制 id(一串类似乱码的数字),下面要用
- 加载可乐罐的 3D 模型,在 ork_tutorials 中包含了一个可乐罐模型 coke.stl,直接下载使用。下载 ork_tutorials
git clone https://github.com/wg-perception/ork_tutorials
- 将 coke.stl 模型加载到数据中
rosrun object_recognition_core mesh_add.py bb01ae7a23033bdef1a1c3b76000092c ~/ork_ws/src/ork_tutorials/data/coke.stl --commit
- 再次在浏览器中打开上面的网址,如下图所示

- 安装 couchapp 工具,在浏览器中查看具体的模型
sudo pip install git+https://github.com/couchapp/couchapp.git
rosrun object_recognition_core push.sh
- 在浏览器中查看



3. 模型训练
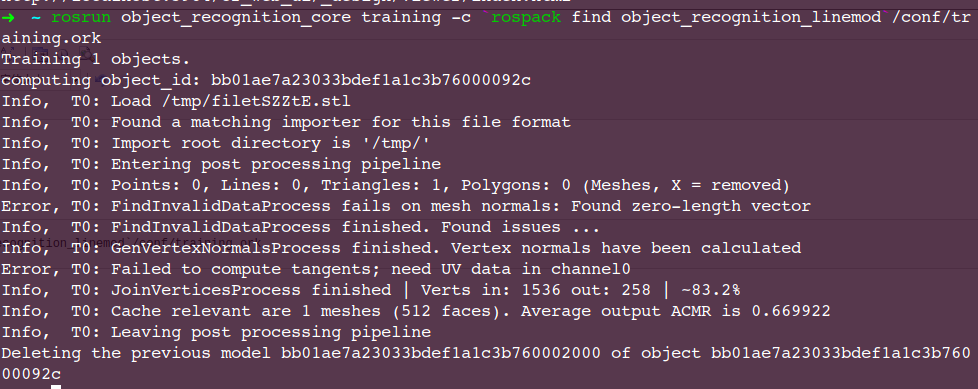
rosrun object_recognition_core training -c `rospack find object_recognition_linemod`/conf/training.ork
训练完如下图所示
4. 物体识别
- 启动 realsense d435i 相机
roslaunch realsense2_camera rs_camera.launch filters:=pointcloud
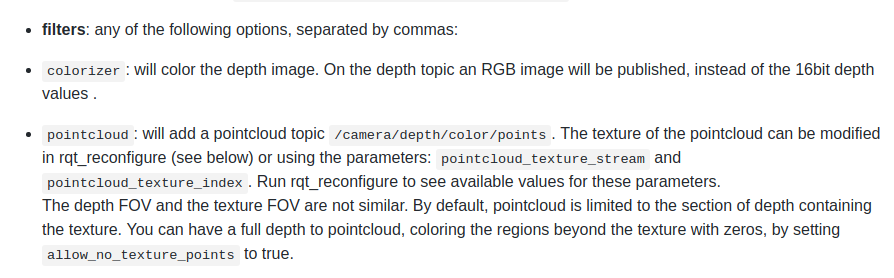
参考:https://github.com/IntelRealSense/realsense-ros
- 运行下述命令,进行物体检测
rosrun object_recognition_core detection -c `rospack find object_recognition_linemod`/conf/detection.ros.ork
我们发现,detection.ros.ork 订阅了下面几个话题:

realsense 发布的对应的话题为:
/camera/depth/camera_info
/camera/depth/image_rect_raw
/camera/color/camera_info
/camera/color/image_raw
因此需要用 topic_tools relay 做话题映射,如下所示:
rosrun topic_tools relay /camera/depth/camera_info /camera/depth_registered/camera_info
rosrun topic_tools relay /camera/depth/image_rect_raw /camera/depth_registered/image_raw
rosrun topic_tools relay /camera/color/camera_info /camera/rgb/icamera_info
rosrun topic_tools relay /camera/color/image_raw /camera/rgb/image_rect_color
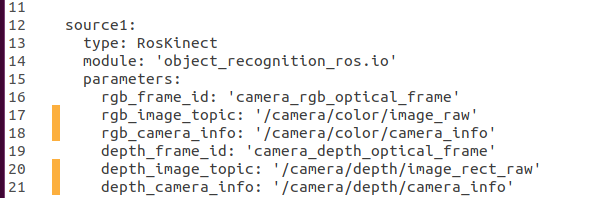
但每次都做映射太麻烦,干脆修改一下 detection.ros.ork 订阅的话题名:
gedit `rospack find object_recognition_linemod`/conf/detection.ros.ork
修改如下:
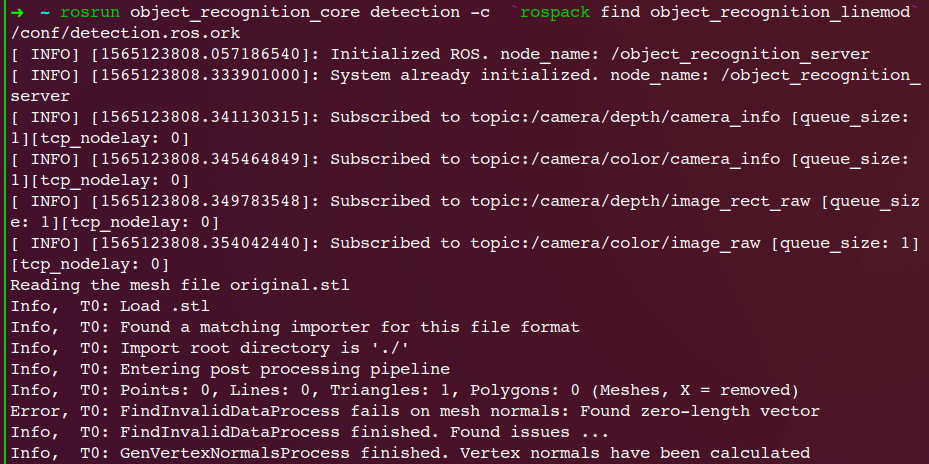
- 做完话题映射或上述设置后,再次运行 detection 命令:
rosrun object_recognition_core detection -c `rospack find object_recognition_linemod`/conf/detection.ros.ork
此时会出现下图所示信息:
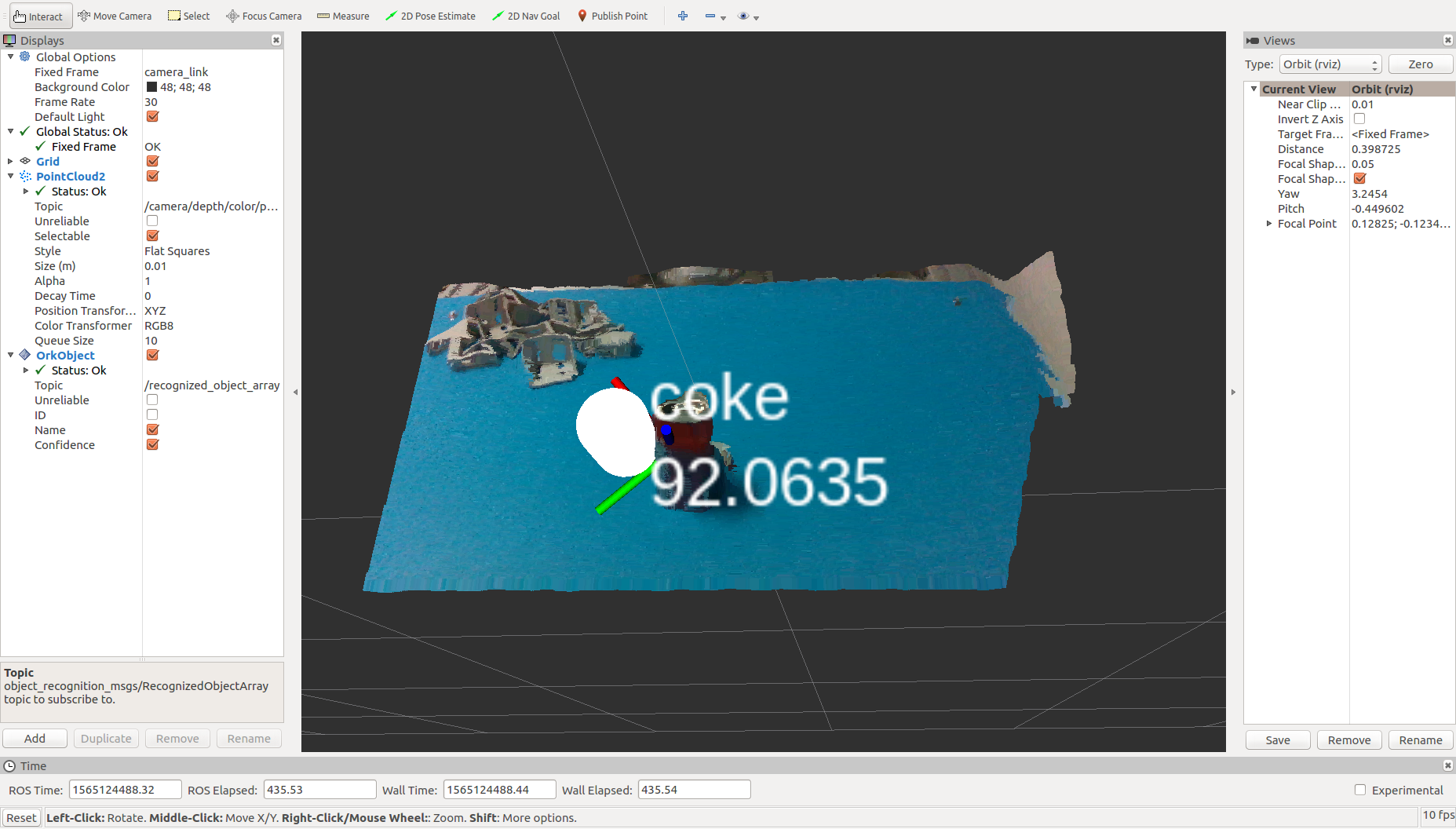
- 打开 rviz 查看
- 添加 Pointcloud2,选择话题 /camera/depth/color/points
- 添加 OrkObject,选择话题 /recognized_object_array (若能够成功识别,则会发布此话题)
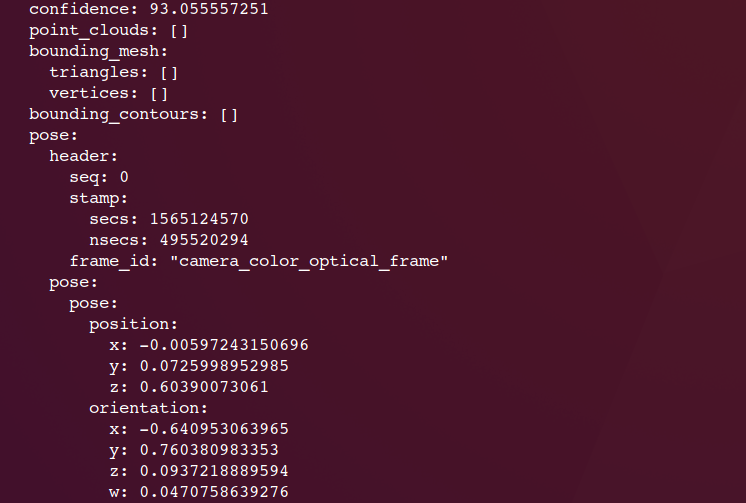
- 查看 /recognized_object_array 话题的实时内容
rostopic echo /recognized_object_array
- 查看节点图
rqt_graph

参考:
[1]. 官网:https://wg-perception.github.io/object_recognition_core/install.html#install
[2]. 《ROS机器人开发实践》胡春旭
[3]. https://blog.csdn.net/weixin_40799950/article/details/81911877
[4]. https://blog.techbridge.cc/2016/05/14/ros-object-recognition-kitchen/
ROS kinetic + Realsens D435i + ORK + LINEMOD 物体识别的更多相关文章
- Ubuntu 16.04 使用docker资料汇总与应用docker安装caffe并使用Classifier(ros kinetic+usb_cam+caffe)
Docker是开源的应用容器引擎.若想简单了解一下,可以参考百度百科词条Docker.好像只支持64位系统. Docker官网:https://www.docker.com/ Docker - 从入门 ...
- 谷歌开源的TensorFlow Object Detection API视频物体识别系统实现教程
视频中的物体识别 摘要 物体识别(Object Recognition)在计算机视觉领域里指的是在一张图像或一组视频序列中找到给定的物体.本文主要是利用谷歌开源TensorFlow Object De ...
- Ubuntu 16.04 + ROS Kinetic 机器人操作系统学习镜像分享与使用安装说明
Ubuntu 16.04 + ROS Kinetic 镜像分享与使用安装说明 内容概要:1 网盘文件介绍 2 镜像制作 3 系统使用与安装 ---- 祝ROS爱好者和开发者新年快乐:-) ---- ...
- ROS_Kinetic_02 ROS Kinetic 迁移指南及中文wiki指南(Migration guide)
ROS_Kinetic_02 ROS Kinetic 迁移指南(Migration guide) 对于ROS Kinetic Kame有些功能包已经更新改变,提供关于这些包的迁移注意或教程.主要针对于 ...
- ROS_Kinetic_01 在ubuntu 16.04安装ROS Kinetic 2017.01更新
ROS_Kinetic系列学习(一),在ubuntu 16.04安装ROS Kinetic. Celebrating 9 Years of ROS! ubuntu16.04已经发布半年多了,ROS的K ...
- SLAM+语音机器人DIY系列:(二)ROS入门——3.在ubuntu16.04中安装ROS kinetic
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- ros kinetic安装rbx1
1.首先安装一些依赖包 sudo apt-get install ros-kinetic-turtlebot-bringup \ ros-kinetic-turtlebot-create ros-ki ...
- Tensorflow object detection API 搭建物体识别模型(四)
四.模型测试 1)下载文件 在已经阅读并且实践过前3篇文章的情况下,读者会有一些文件夹.因为每个读者的实际操作不同,则文件夹中的内容不同.为了保持本篇文章的独立性,制作了可以独立运行的文件夹目标检测. ...
- Tensorflow object detection API 搭建物体识别模型(三)
三.模型训练 1)错误一: 在桌面的目标检测文件夹中打开cmd,即在路径中输入cmd后按Enter键运行.在cmd中运行命令: python /your_path/models-master/rese ...
随机推荐
- [20191127]表 full Hash Value的计算.txt
[20191127]表 full Hash Value的计算.txt --//曾经做过表full Hash Value的计算,当时我是通过建立简单的schema以及表名的形式,使用hashcat破解o ...
- RMAN命令详解和常用汇总
RMAN命令详解和常用汇总转摘汇集,日后使用本文链接:https://blog.csdn.net/EVISWANG/article/details/50448370http://blog.itpub. ...
- postgres centos 创建数据库 创建用户
一个小的流程关于如何创建数据库和用户,用以加强印象,以及留档备份 一.创建账户 1.登录postgres账户 su postgres 2.进入psql 指令 psql 3.创建用户 create US ...
- 在IOS设备上POST提交form表单,后台接收不到值怎么办?
原文:https://blog.csdn.net/xhaimail/article/details/90440029 最近在工作上遇到一个奇葩问题,在Android和Windows平台上做请求时参数都 ...
- php 重复问题
结果: 结论: 尽量在方法内用变量去接受重复的参数或重复的方法/结果,消耗的时间积少成多
- 05-文档编辑与yum命令
一.Linux vi/vim vi是所有的Unix系统都会有,但是目前我们使用最多的是vim编辑器.vim具有程序编辑的能力,可以主动以字体颜色辨别语法的正确性. vim是从vi发展出来的一个文本编辑 ...
- SpringBoot控制台版图书借阅程序
// 实验存档... 效果图: 完整程序:https://pan.baidu.com/s/1-d1J90dkEtM0WKkABu0K0Q 提取码:hcnm DAO层代码由MyBatis Generat ...
- Idea2019激活码
此教程仅用作个人学习,请勿用于商业获利,造成后果自负!!! 此教程已支持最新2019.2版本 此教程实时更新,请放心使用:如果有新版本出现猪哥都会第一时间尝试激活: idea官网下载地址:http:/ ...
- 硬盘容量统计神器WinDirStat
最近遇到C盘快要爆满的问题,我的笔记本是128G SSD + 1t HDD,给C盘分配的空间是80G固态,由于平时疏远管理,造成了C盘臃肿,迁移一些软件,但还是没有太好的解决,这是上知乎发现有大神推荐 ...
- IMP-00009: abnormal end of export file解决方案
一.概述 最近在测试环境的一个oracle数据库上面,使用exp将表导出没有问题,而将导出的文件使用imp导入时却出现了如下错误. IMP-00009: abnormal end of export ...