织女星开发板使用RISC-V核驱动GPIO
前言
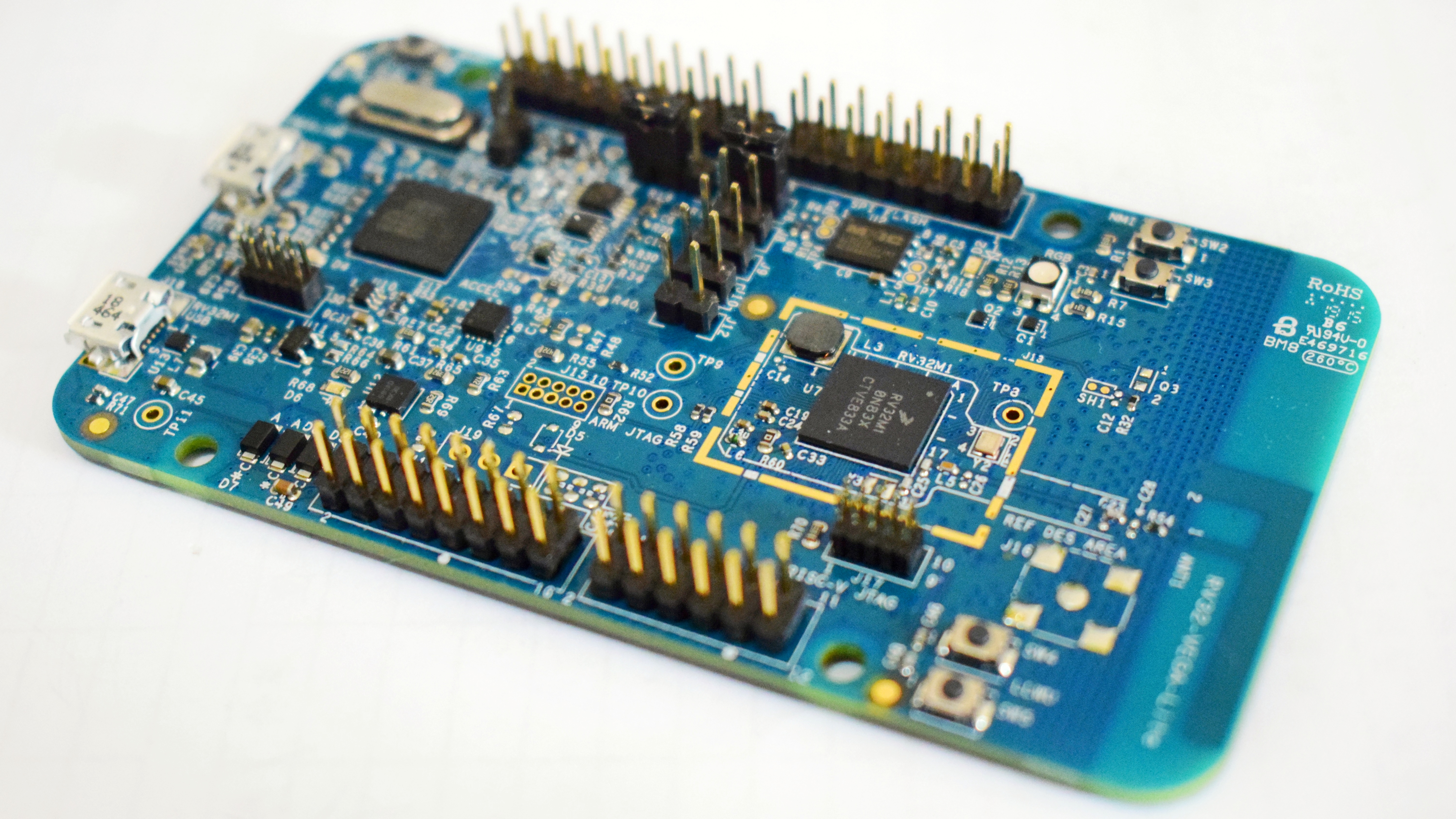
织女星开发板是OPEN-ISA社区为中国大陆地区定制的一款体积小、功耗超低和功能丰富的 RISC-V评估开发板,基于NXP半导体四核异构RV32M1主控芯片。
- 两个RISC-V核:RI5CY + ZERO_RISCY。
- 两个ARM核: Cortex-M4F + Cortex-M0+ 。
4个核被分为两个子系统,大核CM4F/RI5CY和小核CM0+/ZERO-RISCY,片上集成1.25 MB Flash 、384 KB SRAM,其中1 MB的Flash被大核所使用,起始地址0x0000_0000,另外的256 KB Flash被小核所使用,起始地址0x0100_0000。利用该开发板,用户可以快速建立一个使用 RV32M1 的 RISC-V应用和演示系统。详细的介绍可以参考: 真正的RISC-V开发板——VEGA织女星开发板开箱评测 ,本篇文章介绍如何基于RISC-V RI5CY/ZERO内核来点亮板载的RGB_LED/STS_LED、读取按键输入,演示GPIO的输入输出和外部中断功能。
准备工作
在进行以下操作之前,要确保开发环境已经搭建完成,而且能正常下载调试。
- 织女星开发板RISC-V开发环境:Eclipse + riscv32 工具链 + OpenOCD调试工具
- 织女星开发板SDK包:rv32m1_sdk_riscv
- 织女星开发板的原理图
- RV32M1参考手册
以上资料的获取、开发环境搭建和启动模式修改等教程,可以到官方中文论坛查找:www.open-isa.cn
或者是参考我分享的以下文章:
- 真正的RISC-V开发板——VEGA织女星开发板开箱评测
- 手把手教你搭建织女星开发板RISC-V开发环境
- 织女星开发板启动模式修改——从ARM M4核启动
- 织女星开发板调试器升级为Jlink固件
- 织女星开发板RISC-V内核实现微秒级精确延时
寄存器简介
根据RV32M1参考手册GPIO章节的介绍,我们可以获得关于GPIO相关寄存器信息:
各GPIO组的基地址:
GPIOA——4802_0000hGPIOB——4802_0040hGPIOC——4802_0080hGPIOD——4802_00C0hGPIOE——4100_F000h
GPIO配置PCR寄存器
这是一个32位的寄存器,每一个引脚都有对应的一个PORTx_PCRn,用来配置GPIO的以下功能:
- 上下拉配置
- 翻转速率控制
- 开漏使能
- 无源输入滤波器
- 寄存器锁定
- 复用功能设置
以PA0控制寄存器,PORTA_PCR0为例:
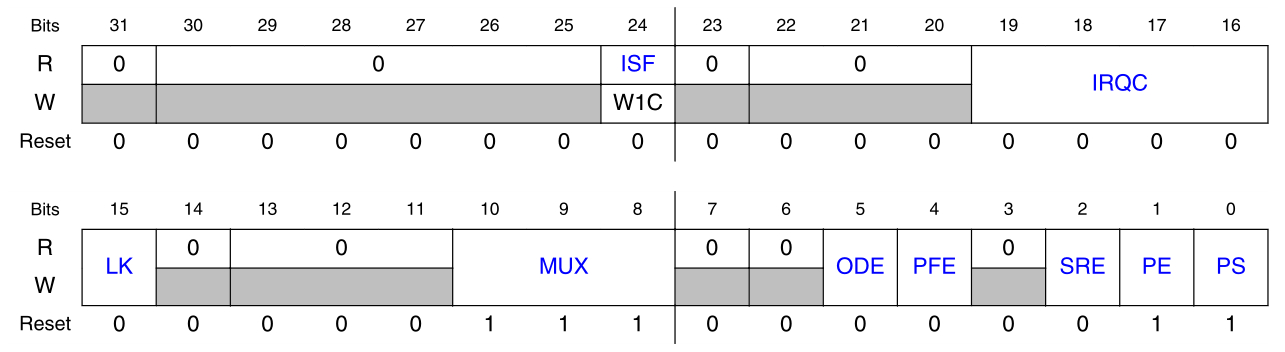
通过查看参考手册,可以了解到各Bit的功能:
- ISF:1位,中断状态标志
- IRQC:4位,配置中断方式和DMA功能
- LK:1位,是否锁定PCR寄存
- MUX:3位,复用功能配置
- ODE:1位,推挽开漏配置
- PFE:1位,滤波器配置
- SRE:1位,翻转速率配置
- PE:1位,上下拉使能
- PS:1位,上下拉配置
详细的配置介绍可以查看参考手册。官方库fsl_port中的
PORT_SetPinConfig(PORT_Type *base, uint32_t pin, const port_pin_config_t *config)PORT_SetPinMux(PORT_Type *base, uint32_t pin, port_mux_t mux)PORT_SetPinInterruptConfig(PORT_Type *base, uint32_t pin, port_interrupt_t config)PORT_SetPinDriveStrength(PORT_Type* base, uint32_t pin, uint8_t strength)
这些函数就是控制的这个PCR寄存器。
GPIO控制寄存器
主要包括控制GPIO输入输出控制,读取输入,控制输出,方向控制等。
寄存器描述和地址偏移量:
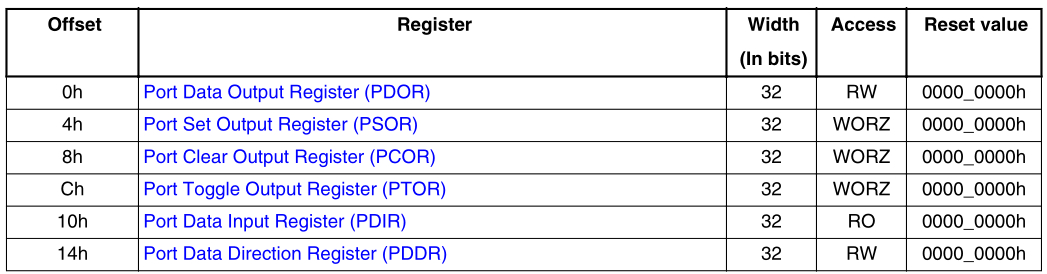
RV32M1的GPIO共有6个32位的控制寄存器,从字面意思可以直接知道每个寄存器的功能:
- PDOR:数据输出寄存器,指定位写入0/1,输出0/1
- PSOR:端口置位输出寄存器,指定位写1,置位输出1,写0状态不变
- PCOR:端口复位输出寄存器,指定位写1,复位输出0,写0状态不变
- PTOR:端口反转输出寄存器,指定位写1,反转输出,写0状态不变
- PDIR:端口输入寄存器,读取指定位输入状态
- PDDR:端口方向配置寄存器,指定位写0作为输入,写1作为输出
官方库中的fsl_gpio文件中实现的函数就是控制的这几个寄存器。
void GPIO_PinInit(GPIO_Type *base, uint32_t pin, const gpio_pin_config_t *config)void GPIO_WritePinOutput(GPIO_Type *base, uint32_t pin, uint8_t output)void GPIO_SetPinsOutput(GPIO_Type *base, uint32_t mask)void GPIO_ClearPinsOutput(GPIO_Type *base, uint32_t mask)void GPIO_TogglePinsOutput(GPIO_Type *base, uint32_t mask)
库函数简介
和其他的MCU一样,由于RV32M1的寄存器众多,为了方便使用,增强程序的可读性,官方开发了库函数,来实现对寄存器的控制,本质上还是操作的寄存器。GPIO控制的库主要由fsl_gpio和fsl_port两个文件组成,其中fsl_gpio主要是对GPIO的控制,如读取输入,控制输出,清除中断标志等,而fsl_port主要实现对GPIO工作的模式进行配置,如复用功能,上拉下拉,开漏推挽,中断触发方式,DMA功能等进行设置。
下面简单介绍几个常用的函数:
PORT_SetPinConfig
配置GPIO的复用功能,驱动能力,推挽开漏,上下拉,滤波器,翻转速率等功能,基于PCR寄存器实现。
port_pin_config_t config;config.driveStrength = kPORT_HighDriveStrength; //驱动能力配置config.mux = kPORT_MuxAsGpio; //通用GPIOconfig.openDrainEnable = kPORT_OpenDrainDisable; //推挽config.passiveFilterEnable = kPORT_PassiveFilterDisable;//滤波器config.pullSelect = kPORT_PullUp; //上拉config.slewRate = kPORT_FastSlewRate; //翻转速率PORT_SetPinConfig(PORTA, 22, &config); //配置GPIOA22
PORT_SetPinMux
配置GPIO的复用功能,基于PCR寄存器实现。
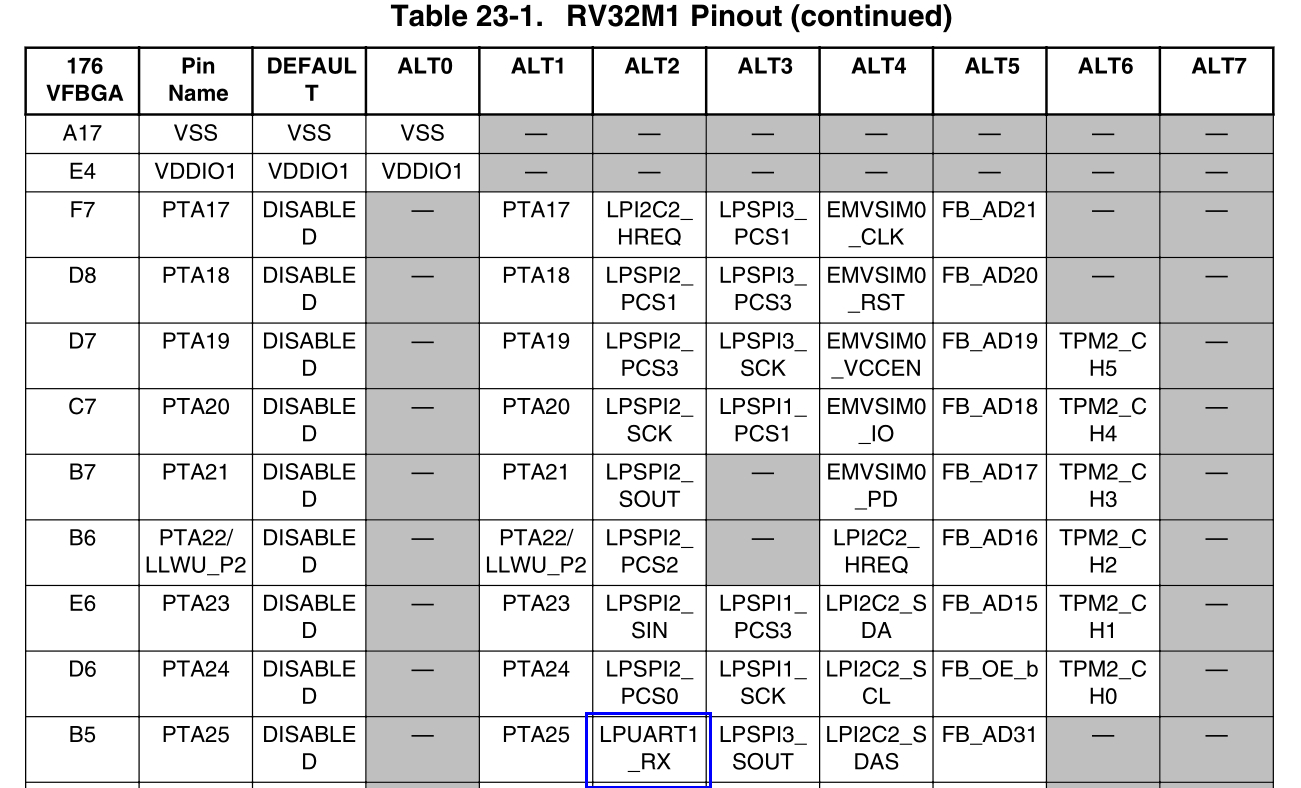
//PA22作为普通GPIO使用PORT_SetPinMux(PORTA, 22, kPORT_MuxAsGpio);//PA25作为UART1_RX功能PORT_SetPinMux(PORTA, 25, kPORT_MuxAlt2);
具体复用为哪种功能,不同的引脚有不同的复用功能,对应的ALTn,可以查看参考手册RV32M1 Pinout介绍。
PORT_SetPinConfig已经包含了PORT_SetPinMux的功能,可以只使用PORT_SetPinConfig来GPIO功能的配置。PORT_SetPinMux函数不推荐和PORT_SetPinsConfig函数一起使用:
This function is NOT recommended to use together with the PORT_SetPinsConfig, because the PORT_SetPinsConfig need to configure the pin mux anyway (Otherwise the pin mux is reset to zero : kPORT_PinDisabledOrAnalog). This function is recommended to use to reset the pin mux
GPIO_PinInit
控制GPIO的输入输出方式,及默认输出电平,基于PDDR、PCOR、PSOR寄存器实现。
gpio_pin_config_t io_init;//配置输出/输出模式io_init.outputLogic = 0; //默认输出0io_init.pinDirection = kGPIO_DigitalOutput; //数字输出GPIO_PinInit(LED_RGB_GPIO, LED_RED_Pin, &io_init); //LED引脚配置
GPIO_WritePinOutput
指定引脚输出高低电平,基于PCOR和PSOR寄存器实现。
GPIO_WritePinOutput(GPIOA, 22, 1); //PA22输出1
GPIO_TogglePinsOutput
指定引脚输出翻转,基于PTOR寄存器实现
GPIO_TogglePinsOutput(GPIOA, 1 << 22); //PA22输出翻转
GPIO_ReadPinInput
读取GPIO输入状态,基于PDIR寄存器实现
in = GPIO_ReadPinInput(GPIOA, 22); //读取PA22输入状态
GPIO操作的函数还有很多,详细的介绍和实现可以直接查看库函数源码。
RGB LED的初始化
从原理图中我们可以得知,织女星开发板上共有4个用户可控制的LED,包括3个RGB LED和1个红色LED,均采用MOS来驱动,引脚输出高电平LED点亮,和GPIO的对应关系如下:
LED_RED——PTA24
LED_GREEN——PTA23
LED_BLUE——PTA22
LED_STS——PTE0
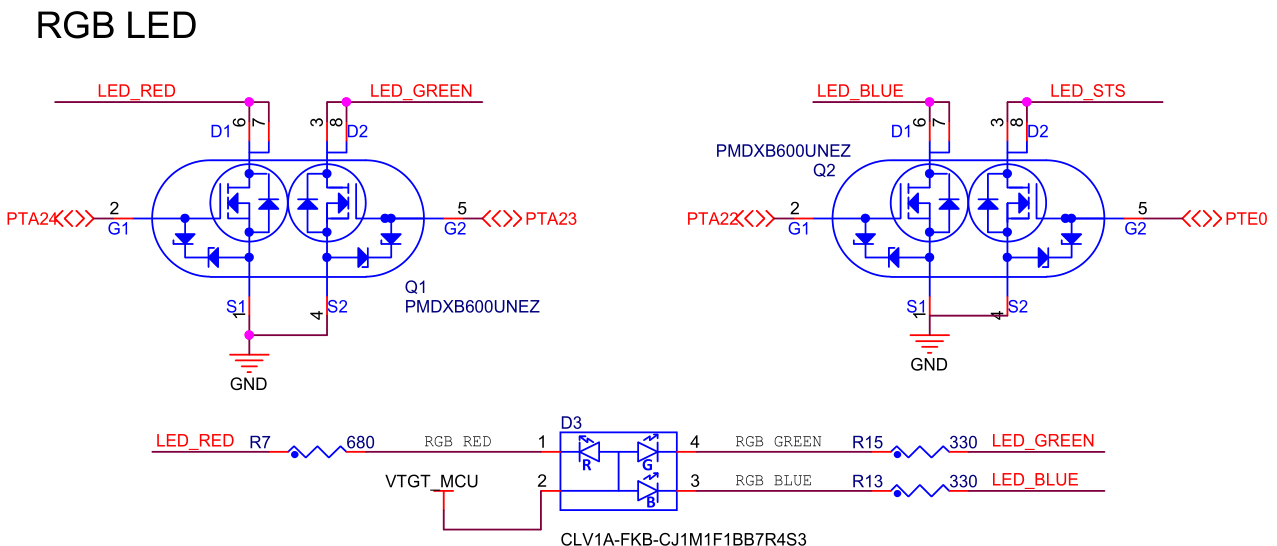
所以我们需要配置PTA22/PTA23/PTA24为普通推挽输出方式,然后输出高低电平就可以控制LED闪烁了。
led_driver.c文件内容
#include "led_driver.h"void LED_RGB_Init(void){gpio_pin_config_t io_init;port_pin_config_t config;//配置输出/输出模式io_init.outputLogic = 0;io_init.pinDirection = kGPIO_DigitalOutput;config.driveStrength = kPORT_HighDriveStrength; //驱动能力config.lockRegister = kPORT_LockRegister; //PCR寄存器被锁定,不能再次改变config.mux = kPORT_MuxAsGpio; //通用GPIOconfig.openDrainEnable = kPORT_OpenDrainDisable; //推挽输出config.passiveFilterEnable = kPORT_PassiveFilterDisable;//滤波器config.pullSelect = kPORT_PullUp; //上拉config.slewRate = kPORT_FastSlewRate; //翻转速率CLOCK_EnableClock(LED_RGB_Clk_Name);CLOCK_EnableClock(LED_STS_Clk_Name); //GPIOE时钟必须一直开启CLOCK_EnableClock(kCLOCK_Rgpio1); //GPIOE配置需要使能这个时钟/*以下两个函数都可以配置端口功能*/PORT_SetPinConfig(LED_RGB_Port, LED_RED_Pin, &config); //配置功能更详细PORT_SetPinConfig(LED_RGB_Port, LED_GREEN_Pin, &config);PORT_SetPinConfig(LED_RGB_Port, LED_BLUE_Pin, &config);PORT_SetPinConfig(LED_STS_Port, LED_STS_Pin, &config);// PORT_SetPinMux(LED_RGB_Port, LED_RED_Pin, kPORT_MuxAsGpio); //只能配置是否复用// PORT_SetPinMux(LED_RGB_Port, LED_GREEN_Pin, kPORT_MuxAsGpio);// PORT_SetPinMux(LED_RGB_Port, LED_BLUE_Pin, kPORT_MuxAsGpio);// CLOCK_DisableClock(LED_RGB_Clk_Name); //可以在配置完成之后关闭时钟,不影响使用GPIO_PinInit(LED_RGB_GPIO, LED_RED_Pin, &io_init);GPIO_PinInit(LED_RGB_GPIO, LED_GREEN_Pin, &io_init);GPIO_PinInit(LED_RGB_GPIO, LED_BLUE_Pin, &io_init);GPIO_PinInit(LED_STS_GPIO, LED_STS_Pin, &io_init);}
要注意的是,时钟使能要放在GPIO配置之前,否则不能访问GPIO配置寄存器,在配置完成之后可以关闭时钟,也可以一直开启。其中GPIOE非常特殊,要想使用GPIOE,必须使能Rgpio1快速时钟,其他的GPIO配置不需要,这是因为GPIOE属于快速GPIO,和其他几组GPIO不是同一个总线。
CLOCK_EnableClock(kCLOCK_Rgpio1); //GPIOE配置需要使能这个时钟
led_driver.h文件内容
#ifndef __LED_DRIVER_H__#define __LED_DRIVER_H__#include "fsl_gpio.h"#include "fsl_port.h"#include "fsl_clock.h"/*LED_RGB_BLUE - A22LED_RGB_GREEN - A23LED_RGB_RED - A24LED_STS - E0*/#define LED_RED_Pin 24#define LED_GREEN_Pin 23#define LED_BLUE_Pin 22#define LED_RGB_Port PORTA#define LED_RGB_GPIO GPIOA#define LED_RGB_Clk_Name kCLOCK_PortA#define LED_STS_Pin 0#define LED_STS_Port PORTE#define LED_STS_GPIO GPIOE#define LED_STS_Clk_Name kCLOCK_PortE#define LED_STS_ON GPIO_WritePinOutput(LED_STS_GPIO, LED_STS_Pin, 1)#define LED_STS_OFF GPIO_WritePinOutput(LED_STS_GPIO, LED_STS_Pin, 0)#define LED_STS_TOGGLE GPIO_TogglePinsOutput(LED_STS_GPIO, 1 << LED_STS_Pin)#define LED_RED_ON GPIO_WritePinOutput(LED_RGB_GPIO, LED_RED_Pin, 1)#define LED_RED_OFF GPIO_WritePinOutput(LED_RGB_GPIO, LED_RED_Pin, 0)#define LED_RED_TOGGLE GPIO_TogglePinsOutput(LED_RGB_GPIO, 1 << LED_RED_Pin)#define LED_GREEN_ON GPIO_WritePinOutput(LED_RGB_GPIO, LED_GREEN_Pin, 1)#define LED_GREEN_OFF GPIO_WritePinOutput(LED_RGB_GPIO, LED_GREEN_Pin, 0)#define LED_GREEN_TOGGLE GPIO_TogglePinsOutput(LED_RGB_GPIO, 1 << LED_GREEN_Pin)#define LED_BLUE_ON GPIO_WritePinOutput(LED_RGB_GPIO, LED_BLUE_Pin, 1)#define LED_BLUE_OFF GPIO_WritePinOutput(LED_RGB_GPIO, LED_BLUE_Pin, 0)#define LED_BLUE_TOGGLE GPIO_TogglePinsOutput(LED_RGB_GPIO, 1 << LED_BLUE_Pin)void LED_RGB_Init(void);#endif
头文件中通过宏定义的方式实现了LED的亮灭和翻转控制。
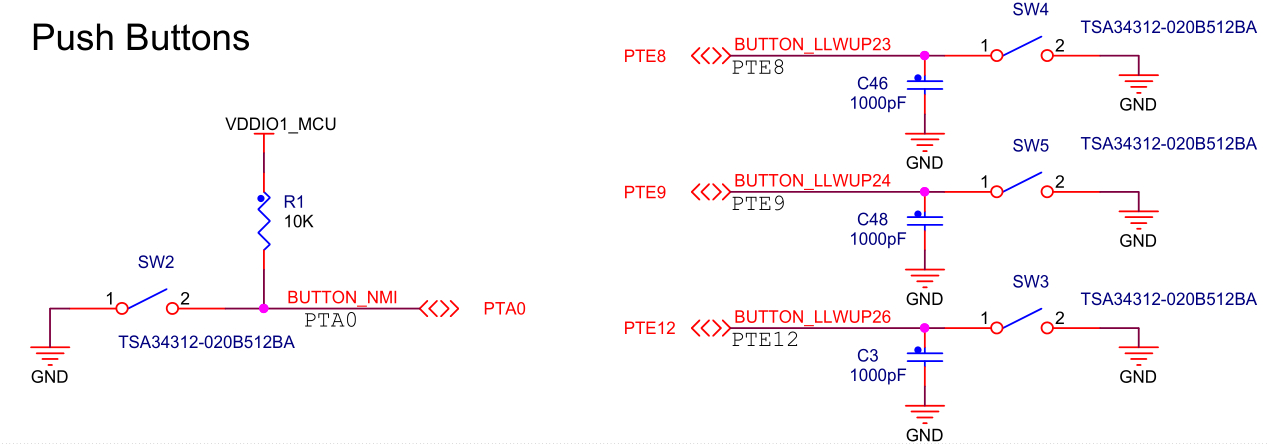
板载按键初始化
按键部分硬件原理图,按下为低电平。
button_driver.c文件内容
#include "button_driver.h"#include "delay.h"#include "led_driver.h"//按键使用普通输入GPIO方式void Button_Init(void){gpio_pin_config_t io_init;port_pin_config_t config;io_init.outputLogic = 0;io_init.pinDirection = kGPIO_DigitalInput;config.mux = kPORT_MuxAsGpio; //通用GPIOconfig.lockRegister = kPORT_LockRegister; //PCR寄存器被锁定,不能再次改变config.pullSelect = kPORT_PullUp; //上拉config.slewRate = kPORT_FastSlewRate; //翻转速率config.lockRegister = kPORT_LockRegister; //PCR寄存器被锁定,不能再次改变config.passiveFilterEnable = kPORT_PassiveFilterEnable; //滤波器CLOCK_EnableClock(BTN_SW2_Clk_Name);CLOCK_EnableClock(BTN_SW3_Clk_Name);// CLOCK_EnableClock(BTN_SW4_Clk_Name);// CLOCK_EnableClock(BTN_SW5_Clk_Name);CLOCK_EnableClock(kCLOCK_Rgpio1); //GPIOE配置需要使能这个时钟//以下两个函数功能一样PORT_SetPinConfig(BTN_SW2_Port, BTN_SW2_Pin, &config);PORT_SetPinConfig(BTN_SW3_Port, BTN_SW3_Pin, &config);PORT_SetPinConfig(BTN_SW4_Port, BTN_SW4_Pin, &config);PORT_SetPinConfig(BTN_SW5_Port, BTN_SW5_Pin, &config);// PORT_SetPinMux(BTN_SW2_Port, BTN_SW2_Pin, kPORT_MuxAsGpio); //设置IO模式为通用GPIO// PORT_SetPinMux(BTN_SW3_Port, BTN_SW3_Pin, kPORT_MuxAsGpio); //设置IO模式为通用GPIO// PORT_SetPinMux(BTN_SW4_Port, BTN_SW4_Pin, kPORT_MuxAsGpio); //设置IO模式为通用GPIO// PORT_SetPinMux(BTN_SW5_Port, BTN_SW5_Pin, kPORT_MuxAsGpio); //设置IO模式为通用GPIOGPIO_PinInit(BTN_SW2_GPIO, BTN_SW2_Pin, &io_init);GPIO_PinInit(BTN_SW3_GPIO, BTN_SW3_Pin, &io_init);GPIO_PinInit(BTN_SW4_GPIO, BTN_SW4_Pin, &io_init);GPIO_PinInit(BTN_SW5_GPIO, BTN_SW5_Pin, &io_init);}//按键使用外部中断初始化函数void ButtonInterruptInit(void){gpio_pin_config_t io_init;port_pin_config_t config;io_init.outputLogic = 0;io_init.pinDirection = kGPIO_DigitalInput;config.mux = kPORT_MuxAsGpio; //通用GPIOconfig.lockRegister = kPORT_LockRegister; //PCR寄存器被锁定,不能再次改变config.pullSelect = kPORT_PullUp; //上拉config.slewRate = kPORT_FastSlewRate; //翻转速率config.lockRegister = kPORT_LockRegister; //PCR寄存器被锁定,不能再次改变config.passiveFilterEnable = kPORT_PassiveFilterEnable; //滤波器CLOCK_EnableClock(BTN_SW2_Clk_Name);CLOCK_EnableClock(BTN_SW3_Clk_Name);// CLOCK_EnableClock(BTN_SW4_Clk_Name);// CLOCK_EnableClock(BTN_SW5_Clk_Name);CLOCK_EnableClock(kCLOCK_Rgpio1); //GPIOE配置需要使能这个时钟//以下两个函数功能一样PORT_SetPinConfig(BTN_SW2_Port, BTN_SW2_Pin, &config);PORT_SetPinConfig(BTN_SW3_Port, BTN_SW3_Pin, &config);PORT_SetPinConfig(BTN_SW4_Port, BTN_SW4_Pin, &config);PORT_SetPinConfig(BTN_SW5_Port, BTN_SW5_Pin, &config);//设置中断触发方式PORT_SetPinInterruptConfig(BTN_SW2_Port, BTN_SW2_Pin, kPORT_InterruptFallingEdge); //下降沿触发中断PORT_SetPinInterruptConfig(BTN_SW3_Port, BTN_SW3_Pin, kPORT_InterruptFallingEdge);PORT_SetPinInterruptConfig(BTN_SW4_Port, BTN_SW4_Pin, kPORT_InterruptFallingEdge);PORT_SetPinInterruptConfig(BTN_SW5_Port, BTN_SW5_Pin, kPORT_InterruptFallingEdge);#if defined(CPU_RV32M1_ri5cy)//RI5CY Core GPIOE需要使能以下两个函数, ZERO Core不用INTMUX_Init(INTMUX0);INTMUX_EnableInterrupt(INTMUX0, 0, PORTE_IRQn);#endifEnableIRQ(BTN_SW2_IRQ);EnableIRQ(BTN_SW3_IRQ);// EnableIRQ(BTN_SW4_IRQ);// EnableIRQ(BTN_SW5_IRQ);GPIO_PinInit(BTN_SW2_GPIO, BTN_SW2_Pin, &io_init);GPIO_PinInit(BTN_SW3_GPIO, BTN_SW3_Pin, &io_init);GPIO_PinInit(BTN_SW4_GPIO, BTN_SW4_Pin, &io_init);GPIO_PinInit(BTN_SW5_GPIO, BTN_SW5_Pin, &io_init);}void PORTA_IRQHandler(void){GPIO_ClearPinsInterruptFlags(BTN_SW2_GPIO, 1U << BTN_SW2_Pin);LED_STS_TOGGLE;LOG("sw2 is pressed \r\n");}//GPIOE外部中断函数void PORTE_IRQHandler(void){uint32_t flag;flag = GPIO_GetPinsInterruptFlags(BTN_SW3_GPIO);GPIO_ClearPinsInterruptFlags(BTN_SW3_GPIO, 1U << BTN_SW3_Pin);GPIO_ClearPinsInterruptFlags(BTN_SW4_GPIO, 1U << BTN_SW4_Pin);GPIO_ClearPinsInterruptFlags(BTN_SW5_GPIO, 1U << BTN_SW5_Pin);if(flag & (1 << BTN_SW3_Pin)) //SW3产生中断{LED_RED_TOGGLE;LOG("sw3 is pressed \r\n");}else if(flag & (1 << BTN_SW4_Pin)){LED_GREEN_TOGGLE;LOG("sw4 is pressed \r\n");}else if(flag & (1 << BTN_SW5_Pin)){LED_BLUE_TOGGLE;LOG("sw5 is pressed \r\n");}}//轮询方式获取按键状态uint8_t GetKey(void){uint8_t key = 1;//按键按下为0if(BTN_SW2_IN && BTN_SW3_IN && BTN_SW4_IN && BTN_SW5_IN){Delay_ms(10);if(!BTN_SW2_IN)key = 2;else if(!BTN_SW3_IN)key = 3;else if(!BTN_SW4_IN)key = 4;else if(!BTN_SW5_IN)key = 5;while(!(BTN_SW2_IN && BTN_SW3_IN && BTN_SW4_IN && BTN_SW5_IN));}return key;}
按键配置为上拉输入模式,同样如果使用GPIOE作为通用GPIO输入,还需要使能Rgpio1时钟:
CLOCK_EnableClock(kCLOCK_Rgpio1); //GPIOE配置需要使能这个时钟
如果使用GPIOE的外部中断功能,还需要使能INTMUX:
#if defined(CPU_RV32M1_ri5cy)//RI5CY Core GPIOE需要使能以下两个函数, ZERO Core不用INTMUX_Init(INTMUX0);INTMUX_EnableInterrupt(INTMUX0, 0, PORTE_IRQn);#endif
button_driver.h文件内容
#ifndef __BUTTON_DRIVER_H__#define __BUTTON_DRIVER_H__#include "fsl_gpio.h"#include "fsl_port.h"#include "fsl_intmux.h"/** SW2 - A0* SW3 - E12* SW4 - E8* SW5 - E9* *///按下为低电平#define BTN_SW2_GPIO GPIOA#define BTN_SW3_GPIO GPIOE#define BTN_SW4_GPIO GPIOE#define BTN_SW5_GPIO GPIOE#define BTN_SW2_Pin 0#define BTN_SW3_Pin 12#define BTN_SW4_Pin 8#define BTN_SW5_Pin 9#define BTN_SW2_Port PORTA#define BTN_SW3_Port PORTE#define BTN_SW4_Port PORTE#define BTN_SW5_Port PORTE#define BTN_SW2_IRQ PORTA_IRQn#define BTN_SW3_IRQ PORTE_IRQn#define BTN_SW4_IRQ PORTE_IRQn#define BTN_SW5_IRQ PORTE_IRQn#define BTN_SW2_Clk_Name kCLOCK_PortA#define BTN_SW3_Clk_Name kCLOCK_PortE#define BTN_SW4_Clk_Name kCLOCK_PortE#define BTN_SW5_Clk_Name kCLOCK_PortE#define BTN_SW2_IN GPIO_ReadPinInput(BTN_SW2_GPIO, BTN_SW2_Pin)#define BTN_SW3_IN GPIO_ReadPinInput(BTN_SW3_GPIO, BTN_SW3_Pin)#define BTN_SW4_IN GPIO_ReadPinInput(BTN_SW4_GPIO, BTN_SW4_Pin)#define BTN_SW5_IN GPIO_ReadPinInput(BTN_SW5_GPIO, BTN_SW5_Pin)/*#define BTN_SW2_IN ReadGPIO(BTN_SW2_GPIO, BTN_SW2_Pin)#define BTN_SW3_IN ReadGPIO(BTN_SW3_GPIO, BTN_SW3_Pin)#define BTN_SW4_IN ReadGPIO(BTN_SW4_GPIO, BTN_SW4_Pin)#define BTN_SW5_IN ReadGPIO(BTN_SW5_GPIO, BTN_SW5_Pin)*/void Button_Init(void);uint8_t GetKey(void);void ButtonInterruptInit(void);#endif
通过GPIO读取函数来获取按键输入状态,或者是通过中断标志来判断输入状态。
主函数应用
使用外部中断方式读取按键输入状态。
#include "main.h"extern uint32_t SystemCoreClock;int main(void){BOARD_BootClockRUN(); //ϵͳʱ֓ŤփUART0_Init();Delay_Init();LOG("SystemCoreClock: %ld \r\n", SystemCoreClock);#if defined(CPU_RV32M1_ri5cy)LOG("RV32M1 RISC-V RI5CY Core Demo \r\n");#elif defined(CPU_RV32M1_zero_riscy)LOG("RV32M1 RISC-V ZERO Core Demo \r\n");#endifLED_RGB_Init();// Button_Init();ButtonInterruptInit();// LPMTR2_Init();// LPIT1_CH3_Init();while (1){}}
代码下载
织女星开发板VEGA_Lite支持从4个核启动,所以在进行程序下载之前,要确认当前的启动模式和当前的工程是对应的。如当前工程是使用RISC-V RI5CY核来驱动GPIO,那么就需要配置芯片启动模式为RI5CY核启动。否则会不能下载。关于启动模式的修改可以参考:织女星开发板启动模式修改
- RI5CY驱动GPIO源码下载:RI5CY_GPIO_Demo.rar
- ZERO驱动GPIO源码下载:ZERO_GPIO_Demo.rar
总结
RV32M1芯片的GPIOE与其他几组GPIO配置方法稍有不同,使用时要特别注意。
参考资料
- MCUXpresso SDK API参考手册
- RV32M1_Vega_Develop_Environment_Setup.pdf
- [RV32M1数据手册](https://github.com/open-isa-org/open-isa.org/raw/master/Reference Manual and Data Sheet/RV32M1DS_Rev.1.1.pdf)
- [RV32M1参考手册](https://github.com/open-isa-org/open-isa.org/raw/master/Reference Manual and Data Sheet/RV32M1RM_Rev.1.1.pdf)
- 织女星开发板快速入门指南.pdf
推荐阅读
- 真正的RISC-V开发板——VEGA织女星开发板开箱评测
- 手把手教你搭建织女星开发板RISC-V开发环境
- 织女星开发板启动模式修改——从ARM M4核启动
- 织女星开发板调试器升级为Jlink固件
- 织女星开发板RISC-V内核实现微秒级精确延时
- 个人博客:www.wangchaochao.top
- 我的公众号:mcu149
织女星开发板使用RISC-V核驱动GPIO的更多相关文章
- 织女星开发板启动模式修改——从ARM M4核启动
前言 刚开始玩织女星开发板的时候,想先从熟悉的ARM核入手,连上Jlink,打开MDK版本的Demo程序,编译OK,却检测不到芯片,仔细看了一下文档,原来RV32M1芯片默认从RISC-V核启动,如果 ...
- 真正的RISC-V开发板——VEGA织女星开发板开箱评测
前言 由于最近ARM公司要求员工"停止所有与华为及其子公司正在生效的合约.支持及未决约定",即暂停与华为的相关合作,大家纷纷把注意力投向了另一个的处理器架构RISC-V,它是基于精 ...
- 手把手教你搭建织女星开发板RISC-V开发环境
前言 Windows环境下搭建基于Eclipse + RISC-V gcc编译器的RISC-V开发环境,配合openocd调试软件,可以实现RISC-V内核程序的编译.下载和调试. 准备工作 工欲善其 ...
- 织女星开发板RISC-V内核实现微秒级精确延时
前言 收到VEGA织女星开发板也有一段时间了,好久没玩了,想驱动个OLED屏,但是首先要实现IIC协议,而实现IIC协议,最基本的就是需要一个精确的延时函数,所以研究了一下如何来写一个精确的延时函数. ...
- 织女星开发板调试器升级为Jlink固件
前言 为了能使用板载的FreeLink调试器来调试RISC-V内核,我们需要把默认的CMSIC-DAP固件,升级为JLink固件,固件升级之后,通过选择使用不同的驱动程序,来支持ARM内核还是RISC ...
- NXP恩智浦VEGA织女星开发板免费申请!
前言 大概两周前申请了一块NXP恩智浦的开发板,今天终于收到了!在这里推荐给大家,官方网站刚上线一个月左右,目前申请的人还不算多,感兴趣的朋友可以申请一个,体验一下这个四核性能怪兽.大厂就是大气,包装 ...
- 飞凌OK6410开发板SDIO无线8189WIFI模块驱动移植
为什么要移植?开发板不是已经提供了无线驱动吗? 貌似是这样的..本来是好用的.加入自己第三方驱动后发现WIFI用不了...最后发现飞凌提供的内核里面没有8189芯片的代码...问售后他们说那边是好的. ...
- 【安富莱】V6,V5开发板用户手册,重在BSP驱动包设计方法,HAL库的框架学习,授人以渔(2019-11-04)
说明: 1.本教程重在BSP驱动包设计方法和HAL库的框架学习,并将HAL库里面的各种弯弯绕捋顺,从而方便我们的程序设计. 2.本次工程延续以往的代码风格,从底层BSP驱动包到应用代码,变量命名,文件 ...
- 友善RK3399/NanoPC-T4开发板wiringPi的C语言访问GPIO外设实例讲解 -【申嵌视频】
1 wiringPi简介 wiringPi库最早是由Gordon Henderson所编写并维护的一个用C语言写成的类库,除了GPIO库,还包括了I2C库.SPI库.UART库和软件PWM库等,由于w ...
随机推荐
- 《master the game of GO wtth deep neural networks and tree search》研究解读
现在”人工智能“如此火爆的一大直接原因便是deepmind做出的阿尔法狗打败李世石,从那时开始计算机科学/人工智能成为了吹逼的主流.记得当时还是在学校晚新闻的时候看到的李世石输的消息,这个新闻都是我给 ...
- ORA-00845 startup启动不起来关于磁盘空间扩充
问题描述:今天在虚拟机下进行startup的操作,但是没有起来,系统报错:ORA-00845: MEMORY_TARGET not supported on this system 1.startup ...
- linux字符集修改
首先介绍一下变量. 1.变量类型:本地变量.环境变量.局部变量.特殊变量(内置).参数变量.只读变量. 2.bash的配置文件:profile类和bashrc类 profile类:为交互式登录的she ...
- css三大特效之优先级
1.什么是优先级作用:当多个选择器选中同一个标签,并且给同一个标签设置相同的属性时,如何层叠就由优先级来确定
- 有效的减少代码中太多的if、else?-策略模式
写这篇文章的目的和上一篇单例模式一样,策略模式也是一种常用的设计模式,太多的if-else不仅看着不太美观而且不好维护,对于自己来说也等于复习了一遍策略模式.先说一下策略 模式的定义: 策略模式封装了 ...
- 多进程使用同一log4j配置导致的日志丢失与覆盖问题
最近接手了一个流传很多手的魔性古早代码,追日志时发现有明显缺失.对log4j不熟,不过可以猜测日志出问题肯定和多进程使用同一个log4j配置有关.经多次排查,终于捋清了其中逻辑.本文对排查过程进行复盘 ...
- ASP.NET Core 中的 ObjectPool 对象重用(二)
前言 上一篇文章主要介绍了ObjectPool的理论知识,再来介绍一下Microsoft.Extensions.ObjectPool是如何实现的. 核心组件 ObjectPool ObjectPool ...
- Git实战指南----跟着haibiscuit学Git(第一篇)
笔名: haibiscuit 博客园: https://www.cnblogs.com/haibiscuit/ Git地址: https://github.com/haibiscuit?tab=re ...
- python基础-网络编程part02
TCP协议 TCP是传输控制协议,建立双向通道. 三次握手,建立连接 客户端向服务端发送建立连接的请求 服务端接收请求返回确认信息给客户端,并向客户端发送建立连接的请求 客户端接收请求返回确认信息给服 ...
- 【数据结构】之栈(C语言描述)
栈(Stack)是编程中最常用的数据结构之一. 栈的特点是“后进先出”,就像堆积木一样,堆的时候要一块一块堆到最上面,拆的时候需要从最上面一块一块往下拆.栈的原理也一样,只不过它的操作不叫堆和拆,而是 ...