poj 1265 Area (Pick定理+求面积)
链接:http://poj.org/problem?id=1265
| Time Limit: 1000MS | Memory Limit: 10000K | |
| Total Submissions: 4969 | Accepted: 2231 |
Description
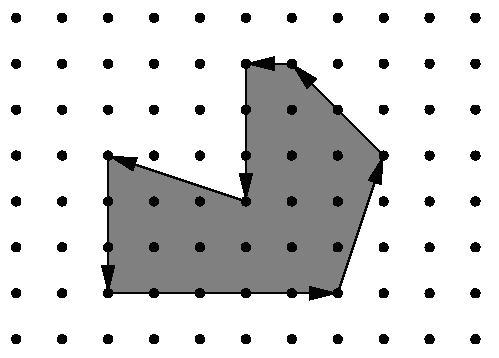
Figure 1: Example area.
You are hired to write a program that calculates the area occupied by the new facility from the movements of a robot along its walls. You can assume that this area is a polygon with corners on a rectangular grid. However, your boss insists that you use a formula he is so proud to have found somewhere. The formula relates the number I of grid points inside the polygon, the number E of grid points on the edges, and the total area A of the polygon. Unfortunately, you have lost the sheet on which he had written down that simple formula for you, so your first task is to find the formula yourself.
Input
For each scenario, you are given the number m, 3 <= m < 100, of movements of the robot in the first line. The following m lines contain pairs 揹x dy�of integers, separated by a single blank, satisfying .-100 <= dx, dy <= 100 and (dx, dy) != (0, 0). Such a pair means that the robot moves on to a grid point dx units to the right and dy units upwards on the grid (with respect to the current position). You can assume that the curve along which the robot moves is closed and that it does not intersect or even touch itself except for the start and end points. The robot moves anti-clockwise around the building, so the area to be calculated lies to the left of the curve. It is known in advance that the whole polygon would fit into a square on the grid with a side length of 100 units.
Output
Sample Input
2
4
1 0
0 1
-1 0
0 -1
7
5 0
1 3
-2 2
-1 0
0 -3
-3 1
0 -3
Sample Output
Scenario #1:
0 4 1.0 Scenario #2:
12 16 19.0
Source
-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=
Pick定理的证明推荐个网址:episte.math.ntu.edu.tw/articles/sm/sm_25_10_1/page2.html
Area=i + b/2 - 1
i为内点 b为边上点
还有点在多边形边上运用GCD的证明,确实不会,希望大神看到给我解释一下
超时代码:
#include <stdio.h>
#include <math.h>
#include <string.h>
#include <stdlib.h>
#include <iostream>
#include <algorithm> #define eps 1e-8
#define MAXX 210
using namespace std; typedef struct point
{
double x;
double y;
}point;
typedef struct line
{
point st;
point ed;
}line; bool dy(double x,double y)
{
return x>y+eps;
}
bool xy(double x,double y)
{
return x<y-eps;
}
bool dyd(double x,double y)
{
return x>y-eps;
}
bool xyd(double x,double y)
{
return x<y+eps;
}
bool dd(double x,double y)
{
return fabs(x-y)<eps;
} double crossProduct(point a,point b,point c)//ac -> ab
{
return (c.x-a.x)*(b.y-a.y)-(c.y-a.y)*(b.x-a.x);
}
double dist(point a,point b)
{
return sqrt((a.x-b.x)*(a.x-b.x)+(a.y-b.y)*(a.y-b.y));
} bool onSegment_1(point a,point b,point c)
{
double maxx=max(a.x,b.x);
double minx=min(a.x,b.x);
double maxy=max(a.y,b.y);
double miny=min(a.y,b.y); if(dd(crossProduct(a,b,c),0.0) && xyd(c.x,maxx) && dyd(c.x,minx)
&& xyd(c.y,maxy) && dyd(c.y,miny))
return true;
return false;
} bool segIntersect_1(point p1,point p2,point p3,point p4)
{
double d1=crossProduct(p3,p4,p1);
double d2=crossProduct(p3,p4,p2);
double d3=crossProduct(p1,p2,p3);
double d4=crossProduct(p1,p2,p4); if(xy(d1*d2,0.0) && xy(d3*d4,0.0))
return true;
if(dd(d1,0.0) && onSegment_1(p3,p4,p1))
return true;
if(dd(d2,0.0) && onSegment_1(p3,p4,p2))
return true;
if(dd(d3,0.0) && onSegment_1(p1,p2,p3))
return true;
if(dd(d4,0.0) && onSegment_1(p1,p2,p4))
return true;
return false;
} point p[MAXX];
line li[MAXX];
int n; bool inPolygon_1(point pot)
{
int count=;
line l;
l.st=pot;
l.ed.x=1e10;
l.ed.y=pot.y;
p[n]=p[];
for(int i=; i<n; i++)
{
if( onSegment_1(p[i],p[i+],pot ))
return true;
if(!dd(p[i].y,p[i+].y))
{
int tmp=-;
if(onSegment_1(l.st,l.ed,p[i]))
tmp=i;
else if(onSegment_1(l.st,l.ed,p[i+]))
tmp=i+;
if(tmp != - && dd(p[tmp].y,max(p[i].y,p[i+].y)))
count++;
else if(tmp == - && segIntersect_1(p[i],p[i+],l.st,l.ed))
count++;
}
}
if(count % ==)
return true;
return false;
} bool inPolygon_2(point pot)
{
int count=;
line l;
l.st=pot;
l.ed.x=1e10;
l.ed.y=pot.y;
p[n]=p[];
for(int i=; i<n; i++)
{
if( onSegment_1(p[i],p[i+],pot ))
return false;
if(!dd(p[i].y,p[i+].y))
{
int tmp=-;
if(onSegment_1(l.st,l.ed,p[i]))
tmp=i;
else if(onSegment_1(l.st,l.ed,p[i+]))
tmp=i+;
if(tmp != - && dd(p[tmp].y,max(p[i].y,p[i+].y)))
count++;
else if(tmp == - && segIntersect_1(p[i],p[i+],l.st,l.ed))
count++;
}
}
if(count % ==)
return true;
return false;
} double Area(int n)
{
if(n<)return ;
int i;
double ret=0.0;
for(i=; i<=n; i++)
{
ret+=(crossProduct(p[],p[i-],p[i]));
}
return fabs(ret)/2.0;
} int main()
{
int m,i,j;
int ttmp=;
scanf("%d",&m);
while(m--)
{
scanf("%d",&n);
p[].x=;p[].y=;
double x,y;
double maxx=-,maxy=-,minx=,miny=;
for(i=; i<=n; i++)
{
scanf("%lf%lf",&x,&y);
p[i].x=p[i-].x+x;
p[i].y=p[i-].y+y;//printf("%lf %lf^^",p[i].x,p[i].y);
}
for(i=; i<=n; i++)
{
maxx=maxx>p[i].x?maxx:p[i].x;
maxy=maxy>p[i].y?maxy:p[i].y;
minx=minx<p[i].x?minx:p[i].x;
miny=miny<p[i].y?miny:p[i].y;
}//printf("%lf %lf^^%lf %lf**",minx,maxx,miny,maxy);
int in=,edge=,sum=;
point cas;
for(i=minx; i<=maxx; i++)
{
for(j=miny; j<=maxy; j++)
{
cas.x=i;cas.y=j;
if(inPolygon_1(cas))
{
sum++;
}
if(inPolygon_2(cas))
{
in++;
}
}
}
double area=Area(n);
edge=sum-in;
printf("Scenario #%d:\n",ttmp++);
printf("%d %d %.1lf\n",in,edge,area);
}
return ;
}
Pick定理运用
#include <stdio.h>
#include <math.h>
#include <string.h>
#include <stdlib.h>
#include <iostream>
#include <algorithm> #define eps 1e-8
#define MAXX 210 typedef struct point
{
double x;
double y;
}point; int gcd(int a,int b)
{
return b ? gcd(b,a%b) : a;
} double crossProduct(point a,point b,point c)
{
return (c.x-a.x)*(b.y-a.y)-(c.y-a.y)*(b.x-a.x);
} point p[MAXX];
int onBorder(int n)
{
int sum=;
for(int i=; i<n; i++)
{
sum+=gcd(abs((int)(p[i].x-p[i+].x)),abs((int)(p[i].y-p[i+].y)));
}
return sum;
} double area(int n)
{
double ans=0.0;
for(int i=; i<=n; i++)
{
ans+=crossProduct(p[],p[i-],p[i]);
}
return fabs(ans)/2.0;
} int main()
{
int n,m,i,j;
scanf("%d",&n);
int cas=;
while(n--)
{
scanf("%d",&m);
p[].x=;p[].y=;
double x,y;
for(i=; i<=m; i++)
{
scanf("%lf%lf",&x,&y);
p[i].x=p[i-].x+x;
p[i].y=p[i-].y+y;
}
double are=area(m);
int edge=onBorder(m);
printf("Scenario #%d:\n",cas++);
printf("%d %d %.1lf\n\n",(int)are+-edge/,edge,are);
}
return ;
}
poj 1265 Area (Pick定理+求面积)的更多相关文章
- POJ 1265 Area (Pick定理 & 多边形面积)
题目链接:POJ 1265 Problem Description Being well known for its highly innovative products, Merck would d ...
- poj 1265 Area(pick定理)
Area Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 4373 Accepted: 1983 Description Bein ...
- [poj 1265]Area[Pick定理][三角剖分]
题意: 给出机器人移动的向量, 计算包围区域的内部整点, 边上整点, 面积. 思路: 面积是用三角剖分, 边上整点与GCD有关, 内部整点套用Pick定理. S = I + E / 2 - 1 I 为 ...
- Area - POJ 1265(pick定理求格点数+求多边形面积)
题目大意:以原点为起点然后每次增加一个x,y的值,求出来最后在多边形边上的点有多少个,内部的点有多少个,多边形的面积是多少. 分析: 1.以格子点为顶点的线段,覆盖的点的个数为GCD(dx,dy),其 ...
- poj 1265 Area( pick 定理 )
题目:http://poj.org/problem?id=1265 题意:已知机器人行走步数及每一步的坐标 变化量 ,求机器人所走路径围成的多边形的面积.多边形边上和内部的点的数量. 思路:1.以 ...
- POJ1265——Area(Pick定理+多边形面积)
Area DescriptionBeing well known for its highly innovative products, Merck would definitely be a goo ...
- poj 1654 Area (多边形求面积)
链接:http://poj.org/problem?id=1654 Area Time Limit: 1000MS Memory Limit: 10000K Total Submissions: ...
- POJ 1265 Area (pick定理)
题目大意:已知机器人行走步数及每一步的坐标变化量,求机器人所走路径围成的多边形的面积.多边形边上和内部的点的数量. 思路:叉积求面积,pick定理求点. pick定理:面积=内部点数+边上点数/2-1 ...
- poj 1265 Area 面积+多边形内点数
Area Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 5861 Accepted: 2612 Description ...
随机推荐
- django上传图片和文字记录
直接上代码 html <form class="form-horizontal" id="upload-form"> <div class=& ...
- msyql数据库位置
MySQL默认的数据文件存储目录为/var/lib/mysql.假如要把目录移到/home/data下需要进行下面几步: 1.home目录下建立data目录 cd /home mkdir data 2 ...
- iOS从健康app中获取步数信息
统计步数信息并不需要我们自己去实现,iOS自带的健康app已经为我们统计好了步数数据 我们只要使用HealthKit框架从健康app中获取这个数据信息就可以了 1.如下图所示 在Xcode中打开Hea ...
- TI BLE CC2541的通讯协议.
包类型: 01命令/02数据/03应答消息 开始标志FF/本数据包长度(注意是16进制)/校验码/包ID/包类型01: 表示是命令/01表示下面要开始传输/03字符串编号/字符串长度/结束位FEFF ...
- Bootstrap:弹出框和提示框效果以及代码展示
前言:对于Web开发人员,弹出框和提示框的使用肯定不会陌生,比如常见的表格新增和编辑功能,一般常见的主要有两种处理方式:行内编辑和弹出框编辑.在增加用户体验方面,弹出框和提示框起着重要的作用,如果你的 ...
- weblogic安装失败
weblogic无法安装所选应用程序 Exception in AppMerge flows' progression Exception in AppMerge flows' progression ...
- 安装keepalived
主机名 网络IP VIPnode1 192.168.2.161 192.168.2.165node2 192.168.2.162 [root@node ...
- Mysql数据库知识-Mysql索引总结 mysql mysql数据库 mysql函数
mysql数据库知识-Mysql索引总结: 索引(Index)是帮助MySQL高效获取数据的数据结构. 下边是自己整理的资料与自己的学习总结,,做一个汇总. 一.真的有必要使用索引吗? 不是每一个性能 ...
- 通过Oracle数据库访问控制功能的方法(Database access control)
修改sqlnet.ora文件中的IP列表后都需要重启监听才能生效.(原文是: Any changes to the values requires the TNS listener to be sto ...
- 27、oracle(三)
1)掌握增.删.改数据和事务操作 2)掌握[视图]和同义词 3)掌握[序列]和索引 4)了解有关用户和权限的控制 ------------------------------------------- ...