基于opencv3.0下的运动车辆识别
在opencv的初等应用上,对运动物体的识别主要有帧差或背景差两种方式。
帧差法主要的原理是当前帧与前一帧作差取绝对值;
背景差主要的原理是当前帧与背景帧作差取绝对值;
在识别运动车辆上主要需要以下9个步骤:
(1)读取帧(VideoCapture,Mat)
(2)ROI选定(Rect)
(3)平滑处理(GaussianBlur)
(4)灰度处理(cvtColor,CV_RGB2GRAY)
(5)帧差或背景差(absdiff)
(6)二值化(threshold)
(7)膨胀(dilate)
(8)腐蚀(erode)
(9)绘制运动车辆(findContours,rectangle)
(1)读取帧(外部视频读取:Videocapture;帧读取:Mat)
这个属于比较基础的内容这里不做解释,直接附上源码:
/******************************************************
函数名称: MyClass
函数功能: 初始化
传入参数:
返 回 值:
建立时间: 2018-05-17
修改时间:
建 立 人:
修 改 人:
其它说明:
******************************************************/
MyClass::MyClass()
{
//capture.open("F:/code/vsc++/Car_Find/Car_Find/交大七公里交通监控.avi");
capture.open("交大七公里交通监控.avi");
//capture = 0;
if (!capture.isOpened())//判断是否打开视频文件
{
exit();
}
FPS = capture.get(CV_CAP_PROP_FPS);
}
/******************************************************
函数名称: ~MyClass
函数功能: 释放空间
传入参数:
返 回 值:
建立时间: 2018-05-17
修改时间:
建 立 人:
修 改 人:
其它说明:
******************************************************/
MyClass::~MyClass()
{
capture.release();
}
/******************************************************
函数名称: play
函数功能: 播放法
传入参数:
返 回 值:
建立时间: 2018-05-17
修改时间:
建 立 人:
修 改 人:
其它说明:
******************************************************/
void MyClass::play(){
Mat frame;
namedWindow("播放界面按Esc退出", );
cvResizeWindow("播放界面按Esc退出", , );
while (true)
{
capture >> frame;
if (frame.empty())break;
imshow("播放界面按Esc退出", frame);
if (waitKey(1000.0 / FPS) == )//按原FPS显示
{
cout << "ESC退出!" << endl;
break;
}
}
}
处理结果:
(2)ROI选定(Rect)
这里使用Rect进行划ROI(感兴趣区域),画出一个矩阵的ROI。在这里最好的ROI是梯形(减少除了道路外的不必要的干扰)
这里提下做法:做一个灰度的mask(遮罩层),然后调整mask的形状大小。ps:感兴趣的可以做下。
(3)平滑处理(处理方法:GaussianBlur)
这里采用高斯平滑处理,在拍摄视频的时候会受到电流的干扰,但这个干扰时均匀存在的,所以采用高斯平滑处理可以去除电流的干扰。
方法很简单,源码如下:
/******************************************************
函数名称: getSmooth
函数功能: 平滑处理
传入参数:
返 回 值:
建立时间: 2018-05-17
修改时间:
建 立 人:
修 改 人:
其它说明:
******************************************************/
Mat MyClass::getSmooth(Mat frame)
{
Mat img;
GaussianBlur(frame, img, Size(, ),,);
return img;
}
处理结果:

(4)灰度处理(处理方法:cvtColor;核:CV_RGB2GRAY)
RGB的图对我们的识别会造成一定的干扰或者说增加处理的难度,这里将原帧转换为灰度图像;
在平滑处理 后,直接调用opencv的cvtColor方法:
/******************************************************
函数名称: getGray
函数功能: 灰度处理
传入参数:
返 回 值:
建立时间: 2018-05-17
修改时间:
建 立 人:
修 改 人:
其它说明:
******************************************************/
Mat MyClass::getGray(Mat frame)
{
Mat img;
cvtColor(frame, img, CV_RGB2GRAY);
return img;
}
处理结果:

(5)帧差或背景差(处理方法:absdiff)
不管是帧差和背景差都是需要获取当前帧跟对比帧,其中对比帧的获取和帧的作差是处理的关键。
在获取到处理好的灰度图在进行帧差处理。
以下为对比帧的获取 的源码:
/******************************************************
函数名称: play
函数功能: 播放帧差法
传入参数:
返 回 值:
建立时间: 2018-05-17
修改时间:
建 立 人:
修 改 人:
其它说明:
******************************************************/
void MyClass::play(){
Mat frame,preframe,curframe,result;
namedWindow("播放界面按Esc退出", );
//cvResizeWindow("播放界面按Esc退出", 600, 500);
while (true)
{
capture >> frame;
if (frame.empty())break;
if (preframe.empty())preframe = frame.clone();//首帧处理
curframe = frame.clone();
imshow("播放界面按Esc退出", frame);
if (waitKey(1000.0 / FPS) == )//按原FPS显示
{
cout << "ESC退出!" << endl;
break;
}
preframe = frame.clone();//记录当前帧为下一帧的前帧
}
}
以下为帧差处理的源码:
/******************************************************
函数名称: getDiff
函数功能: 帧差化处理
传入参数:
返 回 值:
建立时间: 2018-05-17
修改时间:
建 立 人:
修 改 人:
其它说明:
******************************************************/
Mat MyClass::getDiff(Mat preframe,Mat frame)
{
Mat img;
absdiff(preframe, frame, img);
return img;
}
处理结果:
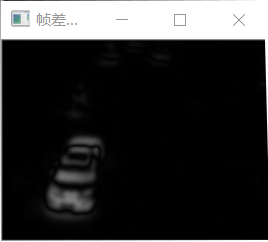
这里一个车的灰度轮廓已经可以识别出来了,但是我们的目的是将车辆的轮廓识别处理,为了更加精准,去除不必要的干扰,需要下面的处理。
(6)二值化(处理方法:threshold,阈值类型:CV_THRESH_BINARY)
Threshold函数详解,其中CV_THRESH_BINARY:当前点值大于阈值时,取Maxval,也就是第四个参数,下面再不说明,否则设置为0
由于这些车辆原画偏暗,这里设定阈值为30,处理当前点值大于阈值时,取白色255。
源码如下:
/******************************************************
函数名称: getEz
函数功能: 二值化处理
传入参数:
返 回 值:
建立时间: 2018-05-17
修改时间:
建 立 人:
修 改 人:
其它说明:
******************************************************/
Mat MyClass::getEz(Mat frame)
{
Mat img;
threshold(frame, img,, , CV_THRESH_BINARY);
return img;
}
处理结果:
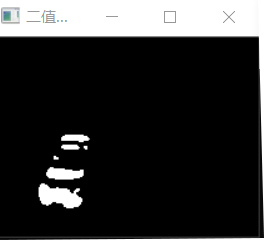
车的黑白轮廓已经显示出来了,不过这里还不是一块整体,所以需要进行膨胀处理。
ps:有些博文的处理方式是先腐蚀处理后膨胀处理,这个在一定程度上会消除干扰点。但是这里考虑到车辆中有摩托车,如果先腐蚀处理的话会将摩托车给消除掉,造成识别精度不高。
(7)膨胀(处理方法:dilate)
膨胀的目的在于将一辆车拼合成一块完整的个体,以达到标识的目的
opencv提供了dilate的方法进行处理,源码如下:
/******************************************************
函数名称: getPz
函数功能: 膨胀处理
传入参数:
返 回 值:
建立时间: 2018-05-17
修改时间:
建 立 人:
修 改 人:
其它说明:
******************************************************/
Mat MyClass::getPz(Mat frame)
{
Mat img;
Mat element=getStructuringElement(MORPH_RECT, Size(, ));
dilate(frame, img, element);
return img;
}
处理结果:
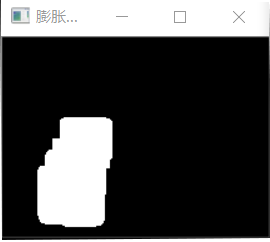
这时候已经合成一块了,但是如果旁边的车靠的太近的话,会导致多辆车黏合成一块,所以下面做腐蚀处理。
(8)腐蚀(处理方法:erode)
腐蚀的目的在于将因为膨胀而导致的黏合,还有非关键点和区域的清除,以达到区分标识的目的。
opencv提供了erode的方法进行处理,源码如下:
/******************************************************
函数名称: getFs
函数功能: 腐蚀处理
传入参数:
返 回 值:
建立时间: 2018-05-17
修改时间:
建 立 人:
修 改 人:
其它说明:
******************************************************/
Mat MyClass::getFs(Mat frame)
{
Mat img;
Mat element = getStructuringElement(MORPH_RECT, Size(, ));
erode(frame, img, element);
return img;
}
处理结果:

ps:这里截的图不是很好,看不出效果分离的效果。感兴趣的可以下载下源码去调试。
(9)绘制运动车辆(处理方法:findContours,rectangle)
这里需要将车辆的外围轮廓描绘出来即可,所以findContours采用
mode取值“CV_RETR_EXTERNAL”,method取值“CV_CHAIN_APPROX_NONE”,即只检测最外层轮廓,并且保存轮廓上所有点;
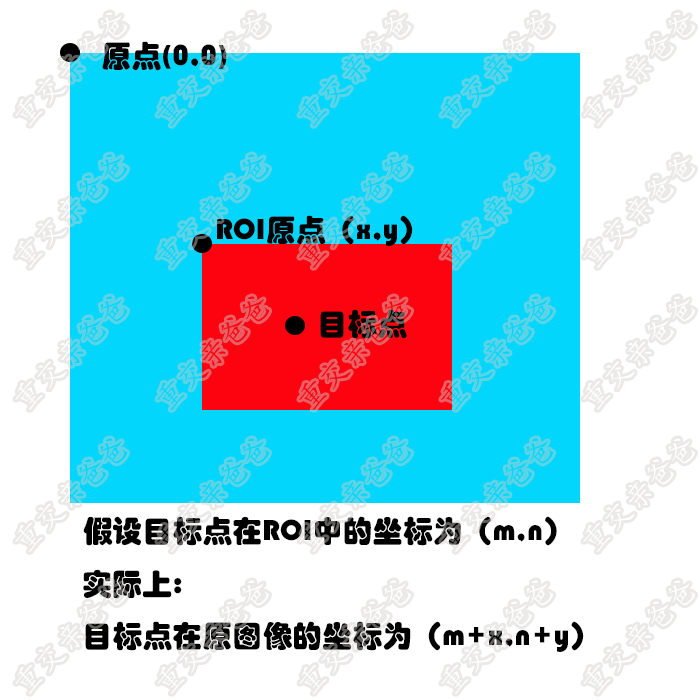
rectangle的使用并不难,但是这里要注意的是:
a.处理的图像是原图像的ROI;
b.findContours输出的是处理过图像的坐标位置
所以在使用rectangle的时候,画区域的时候要加上原来ROI的起始位置的坐标,改成原来图像的坐标位置。
源码如下:
/******************************************************
函数名称: Deal
函数功能: ROI区域处理
传入参数:
返 回 值:
建立时间: 2018-05-17
修改时间:
建 立 人:
修 改 人:
其它说明:
******************************************************/
Mat MyClass::Deal(Mat preframe, Mat frame)
{
Mat result = frame.clone();
Mat curimageROI = preframe(Rect(preframe.cols / , preframe.rows / , preframe.cols / 1.5, preframe.rows / 1.5));
Mat preimageROI = frame(Rect(frame.cols / , frame.rows / , frame.cols / 1.5, frame.rows / 1.5)); Mat sm_pre, sm_cur;
sm_pre = getSmooth(preimageROI);
sm_cur = getSmooth(curimageROI);
imshow("平滑处理", sm_cur); Mat gray_pre, gray_cur;
gray_pre = getGray(sm_pre);
gray_cur = getGray(sm_cur);
imshow("灰度处理",gray_cur); Mat diff;
diff = getDiff(gray_pre, gray_cur);
imshow("帧差处理",diff); Mat ez;
ez = getEz(diff);
imshow("二值化处理", ez); Mat pz;
pz = getPz(ez);
imshow("膨胀处理", pz); Mat fs;
fs = getFs(pz);
imshow("腐蚀处理", fs); vector<vector<Point> > contours;
findContours(fs, contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_NONE);
vector<Rect> boundRect(contours.size());
for (int i = ; i < contours.size(); i++)
{
boundRect[i] = boundingRect(contours[i]);
rectangle(result, Rect(boundRect[i].x + frame.cols/, boundRect[i].y + frame.rows/, boundRect[i].width, boundRect[i].height), Scalar(, , ), );//在result上绘制正外接矩形
}
return result;
}
处理结果:

这里效果不是非常好可以勉强识别出车辆轮廓。但作为初级应用是足够的。
如需要源码请转移至码云:https://gitee.com/cjqbaba/MediaTest/tree/Car_Find进行源码克隆下载
如有问题请留言评论。转载请注明出处,谢谢。
基于opencv3.0下的运动车辆识别的更多相关文章
- 基于opencv3.0下的人脸检测和检测部分的高斯模糊处理
如题 这里将任务分解为三大部分: 1.录播放视频 2.人脸检测 3.部分高斯模糊 其中重点放在人脸检测和部分高斯模糊上 1.录播放视频(以opencv中的VideoCapture类进行实现) 首先罗列 ...
- 基于opencv3.0和下的条形码与二维码识别
其中对条码与二维码的识别分为以下4个步骤 1. 利用opencv和Zbar(或者Zxing)对标准的条形码图片(即没有多余背景干扰,且图片没有倾斜)进行解码,将解码信息显示出来,并与原始信息对比. 2 ...
- 【OpenCV】opencv3.0中的SVM训练 mnist 手写字体识别
前言: SVM(支持向量机)一种训练分类器的学习方法 mnist 是一个手写字体图像数据库,训练样本有60000个,测试样本有10000个 LibSVM 一个常用的SVM框架 OpenCV3.0 中的 ...
- ubuntu14.04下安装cudnn5.1.3,opencv3.0,编译caffe及配置matlab和python接口过程记录
已有条件: ubuntu14.04+cuda7.5+anaconda2(即python2.7)+matlabR2014a 上述已经装好了,开始搭建caffe环境. 1. 装cudnn5.1.3,参照: ...
- ubuntu14.04下配置使用openCV3.0
[操 作 系 统] Ubuntu 14.04 LTS [OpenCV版本] 3.0.0-beta [Eclipse 版 本] 3.8.1 需要知识: Linux系统shell命令基础 编译原理 ...
- windows下配置caffe(环境:win7+vs2013+opencv3.0)
说明:大部分转载于initialneil的大作Caffe + vs2013 + OpenCV in Windows Tutorial (I) – Setup 准备工作: 1.下载CUDA7.5: ht ...
- 在CUDA8.0下编译安装OpenCV3.1.0来实现GPU加速(Compiling OpenCV3.1.0 with CUDA8.0 support)
在CUDA8.0下编译安装OpenCV3.1.0 一.本人电脑配置:ubuntu 14.04, NVIDIA GTX1060. 二.编译OpenCV3.1.0前,读者需要成功安装CUDA8.0(网上有 ...
- 在win10下给vs2013配置opencv3.0
opencv这玩意是真难搞呀. 先吐槽下..... 下面进入正文. 1准备工具: opencv3.0+vs2013 这里面不提供链接下载,自行谷歌百度. 2配置环境: a.打开下载好的opencv(解 ...
- 在已配置成功的opencv3.2.0下配置opencv_contrib模块
简介: 之前在Ubuntu下配置OpenCV时,因为对opencv3..0不是特别了解,没有把opencv_contrib进行安装,这里提醒大家尽量要一次性安装完毕,减少不必要的麻烦. .0文件夹 ( ...
随机推荐
- AndFix使用感想
AndFix已经使用了一段时间了,但是到AndFix上看了一下,最近2个月都没有更新代码了,有141个issues和3个pull request没人处理,其实AndFix的Contributors就俩 ...
- OpenGL OpenCV根据视差图重建三维信息
代码如下: // disparity_to_3d_reconstruction.cpp : 定义控制台应用程序的入口点. // #include "stdafx.h" //Huan ...
- OpenCV——PS 图层混合算法 (二)
具体的算法原理可以参考 PS图层混合算法之二(线性加深,线性减淡,变亮,变暗) // PS_Algorithm.h #ifndef PS_ALGORITHM_H_INCLUDED #define PS ...
- zookeeper 事务日志
前面提到,在zookeeper server的配置文件zoo.cfg中可以通过dataLogDir来配置zookeeper的事务日志的输出目录,这个事务日志类似于下面这样的文件: 这个文件是一个二进制 ...
- iOS监听模式系列之IOS中的几中观察监听模式
本文介绍Objective C中实现观察者模式(也被称为广播者/监听者.发布/注册或者通知)的五种方法以及每种方法的价值所在. 该文章将包括: 1 手动广播者和监听者(Broadcaster and ...
- Struct和Union在内存大小上的区别
名字起的不好,但是也不知道该叫什么好,题目如下: typedef union {];char c;} DATE; struct data { int i; DATE k; double j; }; i ...
- gcc或clang中消除特定警告的方法
一般在编译代码时会有相当多的警告信息,尤其当我们使用了-Wall选项的时候.-Wall绝不是像其字面意思一样打开所有警告.不过它打开的警告也相当多了.对于一些我们已知"无害"但仍然 ...
- C# 创建Word项目标号列表、多级编号列表
在Word文档中,对于有多条并列的信息内容或者段落时,我们常以添加项目标号的形式来使文档条理化,在阅读时,文档也更具美观性.另外,对于在逻辑上存在一定层级结构的内容时,也可以通过多级编号列表来标明文档 ...
- 用sql获取一段时间内的数据
我把我CSDN写的 搬来博客园了.. SELECT * FROM 表名 WHERE timestampdiff(MINUTE, SYSDATE(), send_time) <=60 AND ...
- window.open open new window?
when ever i use window.location.href=//some url it always open a new window, this only happens when ...