ROS学习(七)—— 理解ROS Topic
一、准备工作
1、打开roscore
roscore
2、turtlesim
打开一个turtulesim节点
rosrun turtlesim turtlesim_node
3、turtle keyboard teleoperation
rosrun turtlesim turtle_teleop_key
现在你可以使用键盘上的方向键来控制turtle运动了。如果不能控制,请选中turtle_teleop_key所在的终端窗口以确保你的按键输入能够被捕获。

二、ROS Topic
turtlesim_node节点和turtle_teleop_key节点之间是通过一个ROS话题来互相通信的。turtle_teleop_key在一个话题上发布按键输入消息,而turtlesim则订阅该话题以接收该消息。下面让我们使用rqt_graph来显示当前运行的节点和话题。
1、Using rqt_graph
rqt_graph能够创建一个显示当前系统运行情况的动态图形
(1)安装:
sudo apt-get install ros-kinetic-rqt
(2)使用:
rosrun rqt_graph rqt_graph
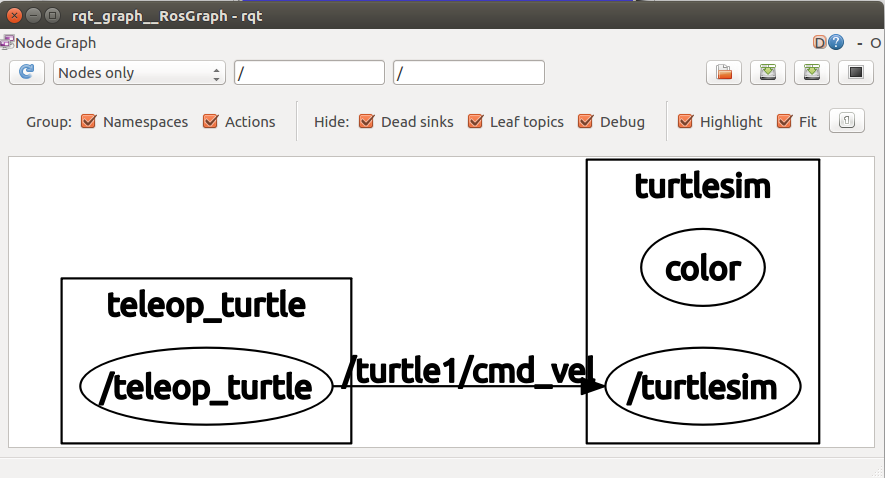
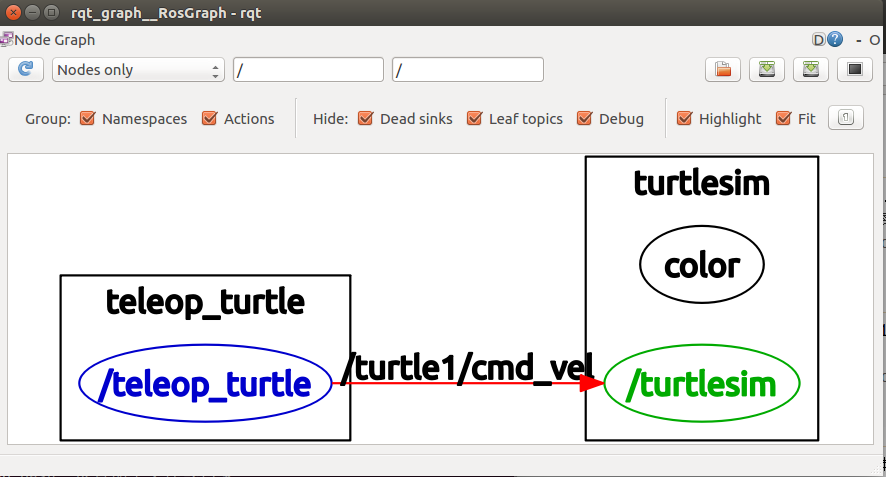
如果你将鼠标放在适当位置,相应的ROS节点(蓝色和绿色)和话题(红色)就会高亮显示。正如你所看到的,turtlesim_node和turtle_teleop_key节点正通过一个名为 /turtle1/cmd_vel的话题来互相通信。
2、介绍rostopic
rostopic命令工具能让你获取有关ROS话题的信息。
rostopic bw display bandwidth used by topic
rostopic echo print messages to screen
rostopic hz display publishing rate of topic
rostopic list print information about active topics
rostopic pub publish data to topic
rostopic type print topic type
3、使用rostopic echo
(1)语法:
rostopic echo [topic]
(2)作用:
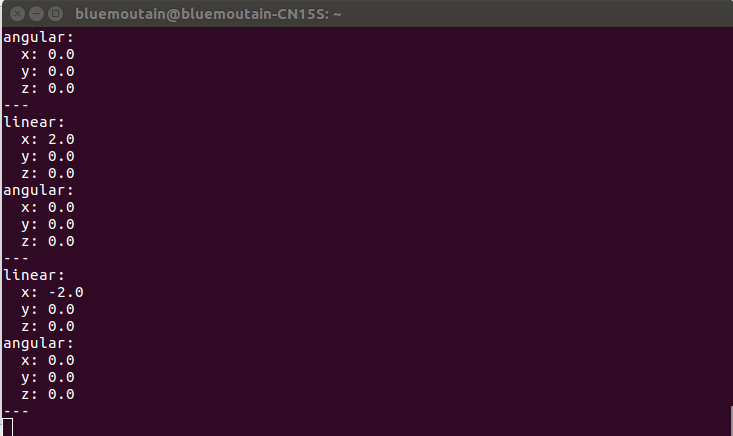
Rostopic echo可以显示在某个话题上发布的数据。
(3)demo
rostopic echo /turtle1/cmd_vel
4、使用rostopic list
(1)作用:
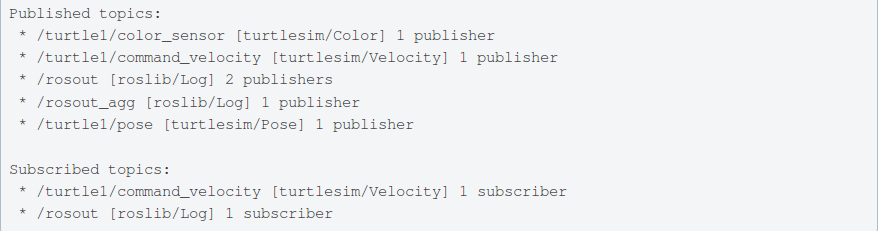
Rostopic list能够列出所有当前订阅和发布的话题。
(2)语法:
Usage: rostopic list [/topic] Options:
-h, --help show this help message and exit
-b BAGFILE, --bag=BAGFILE
list topics in .bag file
-v, --verbose list full details about each topic
-p list only publishers
-s list only subscribers
(3)demo
rostopic list -v
三、ROS Messages
话题之间的通信是通过在节点之间发送ROS消息实现的。对于发布器(turtle_teleop_key)和订阅器(turtulesim_node)之间的通信,发布器和订阅器之间必须发送和接收相同类型的消息。这意味着话题的类型是由发布在它上面的消息类型决定的。使用rostopic type命令可以查看发布在某个话题上的消息类型。
1、使用rostopic type
(1)作用:
可以返回所发布话题的消息类型
(2)语法:
rostopic type [topic]
(3)demo
rostopic type /turtle1/cmd_vel
返回 geometry_msgs/Twist 我们可以看看这个消息类型的具体信息(使用rosmsg)
rosmsg show geometry_msgs/Twist
四、使用rostopic发送消息
1、rostopic pub
(1)语法:
rostopic pub [topic] [msg_type] [args]
(2)作用:
可以把数据发布到当前某个正在广播的话题上。
(3)demo
| 命令成分 | 作用 |
| rostopic pub | 发布消息到话题的指令 |
| -1 | 只发送一次 |
| -r | 表示重复发送命令 |
| /turtle1/cmd_vel | 发送给哪个话题 |
| geometry_msgs/Twist | 发送消息类型 |
| -- | 表示后面出现的 ' - ' 不表示命令 |
| '[2,0,0]' '[0,0,1.8]' | 发送消息内容,格式可以查询http://wiki.ros.org/ROS/YAMLCommandLine |
发送一次命令:
rostopic pub - /turtle1/cmd_vel geometry_msgs/Twist -- '[2,0,0]' '[0,0,1.8]'
重复发送命令
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -r -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, -1.8]'
2、rostopic hz
(1)作用:
查询消息发布的频率
(2)语法:
rostopic hz [topic]
(3)demo:
rostopic hz /turtle1/pose

(4)我们也可以结合rostopic type和rosmsg show命令来获取关于某个话题的更深层次的信息
rostopic type /turtle1/cmd_vel | rosmsg show
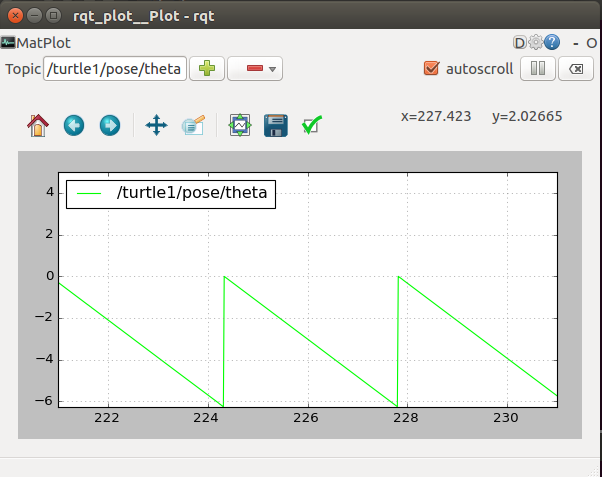
5、rqt_plot
(1)作用:
rqt_plot命令可以实时显示一个发布到某个话题上的数据变化图形
(2)用法:
rosrun rqt_plot rqt_plot
然后可以跳出的小程序中加入话题数据即可。
ROS学习(七)—— 理解ROS Topic的更多相关文章
- ROS学习笔记七:在ROS中使用USB摄像头
下面是一些USB摄像头的驱动(大多数摄像头都支持uvc标准): 1 使用软件库里的uvc-camera功能包 1.1 检查摄像头 lsusb ----------------------------- ...
- SLAM+语音机器人DIY系列:(二)ROS入门——8.理解roslaunch在大型项目中的作用
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- ROS知识(2)----理解ROS系统结构
学习新事物,方法高于技术本身,如果没有把握"BIG PICTURE"的话很难理解进去.通过以下几点进行理解ROS: ROS实际上不是操作系统,他只是一个通信的框架,一个代码管理的架 ...
- 理解ros话题--6
理解ROS话题(原创博文,转载请标明出处--周学伟http://www.cnblogs.com/zxouxuewei/) Description: 本教程介绍ROS话题(topics)以及如何使用ro ...
- 关于ROS学习的一些反思
距离发布上一篇ROS的博客已经过去两年了,才发现原来自己已经这么久可没有写过关于ROS的文章,想来很是惭愧.这两年时间,自己怀着程序员的梦想,研究过RTOS,探索过Linux,编写过Android应用 ...
- SLAM+语音机器人DIY系列:(二)ROS入门——7.理解tf的原理
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- ROS学习笔记(一) : 入门之基本概念
目录 基本概念 1. Package 2. Repositories 3. Computation Graph 4. Node 5. Master 6. Message 7. Topic 8. Ser ...
- ROS学习手记 - 8 编写ROS的Publisher and Subscriber
上一节我们完成了 message & srv 文件的创建和加入编译,这次我们要玩简单的Publisher 和 Subscriber 要玩 Publisher 和 Subscriber, 需要具 ...
- ROS学习手记 - 7 创建ROS msg & srv
至此,我们初步学习了ROS的基本工具,接下来一步步理解ROS的各个工作部件的创建和工作原理. 本文的详细文档:http://wenku.baidu.com/view/623f41b3376baf1ff ...
- 2017年7月ROS学习资料小结
<孙子兵法·谋攻篇>:"上兵伐谋,其次伐交,其次伐兵,其下攻城:攻城之法为不得已." 任何发生在自己国土上的战争,即便胜利,也饱含屈辱. ----~~~~----Gaz ...
随机推荐
- Linux中盘符的两种挂载方法
相信接触过Linux系统的人对于mount命令都不陌生,今天是农历2017年的最后一个工作日,趁着时光还在,就说一下两种不同的挂载方法吧. 课前小知识: 命令格式:mount [-t vfstype] ...
- [Spring Boot] Singleton and Prototype
When we use Bean to do autowired, it actually use singleton, so even we create multi instanses, they ...
- Web - TCP的三次握手
在TCP/IP协议中,TCP协议提供可靠的连接服务,採用三次握手建立一个连接. 第一次握手:建立连接时,client发送syn包(syn=j)到server,并进入SYN_SENT状态,等待serv ...
- Solidworks公司电脑图纸被加密之后如何解密输出
第一步:打开总装配的组件(该组件需要包含你所有需要的零件),比如打开其中一个: 第二步:Solidworks的菜单中依次:"文件"→"打包"(有的版本是pa ...
- GetParam(name)
function GetParam(name) { var match = new RegExp(name + "=*([^&]+)*", "i").e ...
- JNotify的监测文件变化的简单测试例子
一.理由 使用JNotify监测的更全面,更快速. 二.参考代码 import net.contentobjects.jnotify.JNotify; import net.contentobject ...
- 火狐浏览器flash经常奔溃的
火狐浏览器flash经常奔溃的 1.首先,在火狐浏览器地址栏在输入:about:config?filter=dom.ipc.plugins.flash.disable-protected-mode,按 ...
- BFC特性 形成BFC
1.示例代码 <!DOCTYPE html> <html> <head> <meta charset="UTF-8"> <ti ...
- Java ReEntrantLock 之 Condition条件(Java代码实战-002)
import java.util.LinkedList; import java.util.concurrent.locks.Condition; import java.util.concurren ...
- 实现Excel单元格中的下拉选项
目的:控制数据录入的类型和具体数据的限制,避免数据错误输入 操作步骤: 1.选中需要设置下拉菜单的单元格 2.单击数据选项卡---数据有效性---设置选项卡---允许功能中选择序列---在来源编辑框中 ...