ROS-SLAM-自主导航
前言:无。
前提:已下载并编译了相关功能包集,如还未下载,可通过git下载:https://github.com/huchunxu/ros_exploring.git
一、启动仿真环境
cd ~/catkin_ws/src/robot_mrobot/mrobot_gazebo/launch roslaunch mrobot_laser_nav_gazebo.launch
二、启动slam导航
cd ~/catkin_ws/src/robot_mrobot/mrobot_navigation/launch roslaunch exploring_slam_demo.launch
三、手动探索
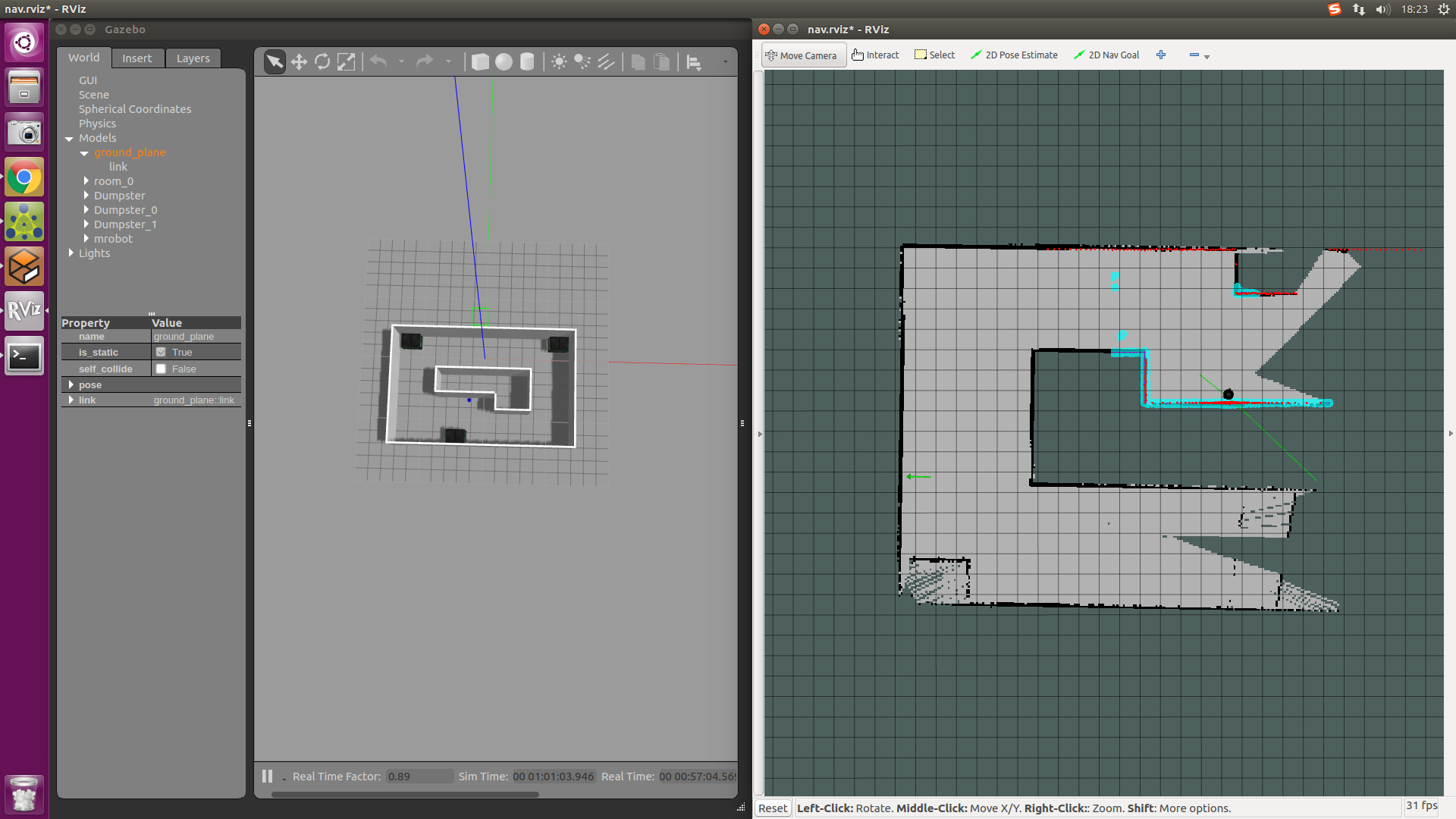
使用rviz的“2D nav goal”手动选择目的地,机器人开始导航,同时使用mapping算法实时构建地图。
效果如下;

如果多次尝试无果,机器人最终会放弃,终端里将看到错误提示。
四、自动slam导航
rosrun mrobot_navigation random_navigation.py
----------------------------------
显示如下:
-END-
ROS-SLAM-自主导航的更多相关文章
- 入门ROS教程与视频汇总(kinetic)
参考网址: Richard Wang 3 Shawn Chen 部分视频网址: http://v.youku.com/v_show/id_XMjUxMTc5MzE5Mg http://i.you ...
- SLAM+语音机器人DIY系列:(二)ROS入门——7.理解tf的原理
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- SLAM+语音机器人DIY系列:(二)ROS入门——10.在实际机器人上运行ROS高级功能预览
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- 【ros】rplidar Hector Slam
想用rplidar跑一下hector slam,在网上发现了几个教程写的都不错,但是亲测发现都有点不足,综合了一下,进行补充. 1. 安装ros 和 创建工作空间 http://blog.csdn.n ...
- implement Google's Open Source Slam "Cartographer" demos in ROS/rviz
Cartographer is a backpack equipped with Simultaneous Localization and Mapping (SLAM) technology. 1. ...
- ROS_Kinetic_27 在ROS中使用Cartographer进行SLAM
ROS_Kinetic_27 在ROS中使用Cartographer进行SLAM Cartographer是谷歌新開源的通用的2D和3D定位與構圖同步的SLAM工具,並提供ROS接口. 论文Real- ...
- Learning ROS for Robotics Programming Second Edition学习笔记(十) indigo Gazebo rviz slam navigation
中文译著已经出版,详情请参考:http://blog.csdn.net/ZhangRelay/article/category/6506865 moveit是书的最后一章,由于对机械臂完全不知,看不懂 ...
- Learning ROS for Robotics Programming Second Edition学习笔记(三) indigo rplidar rviz slam
中文译著已经出版,详情请参考:http://blog.csdn.net/ZhangRelay/article/category/6506865 Learning ROS for Robotics Pr ...
- SLAM+语音机器人DIY系列:(二)ROS入门——1.ROS是什么
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- SLAM+语音机器人DIY系列:(二)ROS入门——2.ROS系统整体架构
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
随机推荐
- JavaScript的面向对象
JavaScript的对象 对象是JavaScript的一种数据类型.对象可以看成是属性的无序集合,每个属性都是一个键值对,属性名是字符串,因此可以把对象看成是从字符串到值的映射.这种数据结构在其他语 ...
- javascript中对象属性的介绍
<!DOCTYPE html> <html lang="en"> <head> <meta charset="UTF-8&quo ...
- Windows 下修改 MySQL 编码为 utf8
问题 Windows 下安装 MySQL 后,默认编码不全utf8. mysql> show variables like '%char%'; +------------------------ ...
- Django02 Django基础知识
一.内容回顾 1.web应用程序 2.HTTP协议 a.http协议特性 b.http请求格式 c.http响应格式 3.wsgiref模块 4.Django下载与简单应用 a.Django简介(MT ...
- Exact Change FreeCodeCamp
function checkCashRegister(price, cash, cid) { var change; var sumCid = 0; // Here is your change, m ...
- nginx获取经过层层代理后的客户端真实IP(使用正则匹配)
今天帮兄弟项目搞了一个获取客户端真实IP的问题,网上这种问题很多,但是对于我们的场景都不太合用,现把我的解决方案share给大家,如有问题,请及时指出. 场景: 在请求到达后端服务之前,会经过层层代理 ...
- Python笔记2----包、模块、库、条件循环
包.模块.库 包指的是 : 文件夹 模块和库就是.py文件. 其中,库是一些功能相同的模块的集合,其也是模块. 1.import 模块 2.form 库 import 模块 3.import 包.子包 ...
- 移植Mplayer到OK6410开发板
移植Mplayer到OK6410开发板 作者:vasage 项目需要,需要将Mplayer移植到开发板上,所以今天花了一下下午成功移植,其中参考很多文档,后发现许多文档陈旧,些许文档有少量错误,所以这 ...
- phthon中的open函数模式
原文地址:http://www.runoob.com/python/python-func-open.html r 以只读方式打开文件.文件的指针将会放在文件的开头.这是默认模式. rb 以二进制格式 ...
- Python for Xpath
# Xpath- 在XML文件中查找信息的一套规则/语言,根据XML的元素或者属性进行遍历 ## Xpath开发工具- 开源的Xpath表达式编辑工具:XMLQuire- Chrome插件:Xpath ...