皮卡丘检测器-CNN目标检测入门教程
目标检测通俗的来说是为了找到图像或者视频里的所有目标物体。在下面这张图中,两狗一猫的位置,包括它们所属的类(狗/猫),需要被正确的检测到。
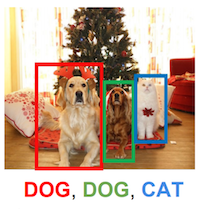
所以和图像分类不同的地方在于,目标检测需要找到尽量多的目标物体,而且要准确的定位物体的位置,一般用矩形框来表示。
在接下来的章节里,我们先介绍一个流行的目标检测算法,SSD (Single-Shot MultiBox Object Detection).
友情提示:本章节特别长,千万不要在蹲坑的时候点开。
本文中涉及MXNet 0.11最新的发布的gluon接口,参考MXNet 0.11发布,加入动态图接口Gluon,还有两位CMU教授的亲笔教程
SSD: Single Shot MultiBox Detector
顾名思义,算法的核心是用卷积神经网络一次前向推导求出大量多尺度(几百到几千)的方框来表示目标检测的结果。网络的结构用下图表示。
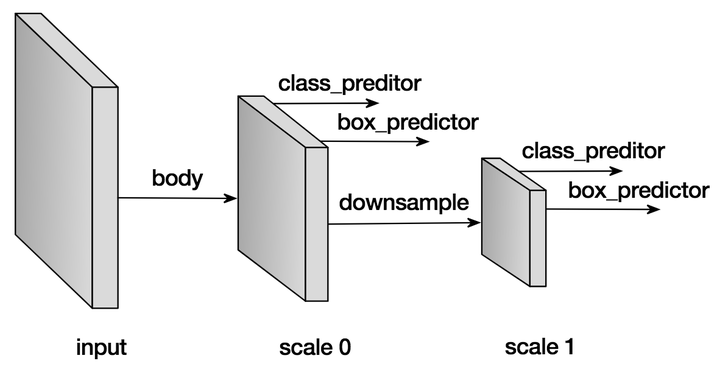
跟所有的图像相关的网络一样,我们需要一个主干网络来提取特征,同时也是作为第一个预测特征层。网络在当前层产生大量的预设框,和与之对应的每个方框的分类概率(背景,猫,狗等等)以及真正的物体和预设框的偏移量。在完成当前层的预测后,我们会下采样当前特征层,作为新的预测层,重新产生新的预设框,分类概率,偏移量。这个过程往往会重复好几次,直到预测特征层到达全局尺度( )。
接下来我们用例子解释每个细节实现。
预设框 Default anchor boxes
预设框的形状和大小可以由参数控制,我们往往设置一堆预设框,以期望任意图像上的物体都能有一个预设框能大致重合,由于每个预设框需要对应的预测网络预测值,所以希望对于每个物体都有100%重合的预设框是不现实的,可能会需要几十万甚至几百万的预设框,但是采样的预设框越多,重合概率越好,用几千到上万个预设框基本能实现略大于70%的最好重合率,同时保证了检测的速度。
为了保证重合覆盖率,对于每个特征层上的像素点,我们用不同的大小和长宽比来采样预设框。 假设在某个特定的特征层( ),每个预设框的中心点就是特征像素点的中心,然后我们用如下的公式采样预设框:
- 预设框的中心为特征像素点的中心
- 对于长宽比
, 尺寸
, 生成的预设框大小
。
- 对于长宽比
同时
, 生成的预设框大小
, 其中
是第一个预设的尺寸。
这里例子里,我们用事先实现的层MultiBoxPrior产生预设框,输入 个预设尺寸,和
个预设的长宽比,输出为
个方框而不是
个。 当然我们完全可以使用其他的算法产生不同的预设框,但是实践中我们发现上述的方法覆盖率和相应需要的预设框数量比较合适。
import mxnet as mx
from mxnet import nd
from mxnet.contrib.ndarray import MultiBoxPrior
n = 40
# 输入形状: batch x channel x height x weight
x = nd.random_uniform(shape=(1, 3, n, n))
y = MultiBoxPrior(x, sizes=[.5, .25, .1], ratios=[1, 2, .5])
# 取位于 (20,20) 像素点的第一个预设框
# 格式为 (x_min, y_min, x_max, y_max)
boxes = y.reshape((n, n, -1, 4))
print('The first anchor box at row 21, column 21:', boxes[20, 20, 0, :])The first anchor box at row 21, column 21:
[ 0.26249999 0.26249999 0.76249999 0.76249999]
<NDArray 4 @cpu(0)>
看着数字不够直观的话,我们把框框画出来。取最中心像素的所有预设框,画在图上的话,我们看到已经可以覆盖几种尺寸和位置的物体了。把所有位置的组合起来,就是相当可观的预设框集合了。
import matplotlib.pyplot as plt
def box_to_rect(box, color, linewidth=3):
"""convert an anchor box to a matplotlib rectangle"""
box = box.asnumpy()
return plt.Rectangle(
(box[0], box[1]), (box[2]-box[0]), (box[3]-box[1]),
fill=False, edgecolor=color, linewidth=linewidth)
colors = ['blue', 'green', 'red', 'black', 'magenta']
plt.imshow(nd.ones((n, n, 3)).asnumpy())
anchors = boxes[20, 20, :, :]
for i in range(anchors.shape[0]):
plt.gca().add_patch(box_to_rect(anchors[i,:]*n, colors[i]))
plt.show()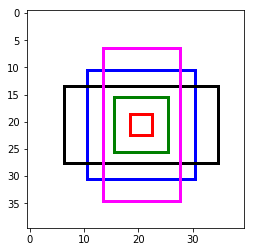
分类预测 Predict classes
这个部分的目标很简单,就是预测每个预设框对应的分类。我们用 , Padding (填充)
的卷积来预测分类概率,这样可以做到卷积后空间上的形状不会变化,而且由于卷积的特点,每个卷积核会扫过每个预测特征层的所有像素点,得到
个预测值,
对应了空间上所有的像素点,每个通道对应特定的预设框
。假设有10个正类,每个像素5个预设框,那么我们就需要
个通道。 具体的来说,对于每个像素第
个预设框:
- 通道
的值对应背景(非物体)的得分
- 通道
对应了第
类的得分
from mxnet.gluon import nn
def class_predictor(num_anchors, num_classes):
"""return a layer to predict classes"""
return nn.Conv2D(num_anchors * (num_classes + 1), 3, padding=1)
cls_pred = class_predictor(5, 10)
cls_pred.initialize()
x = nd.zeros((2, 3, 20, 20))
print('Class prediction', cls_pred(x).shape)Class prediction (2, 55, 20, 20)
预测预设框偏移 Predict anchor boxes
为了找到物体准确的位置,光靠预设框本身是不行的,我们还需要预测偏移量以便把真正的物体框出来。
假设 是某个预设框,
是目标物体的真实矩形框,我们需要预测的偏移为
,全都是长度为4的向量, 我们求得偏移
所有的偏移量都除以预设框的长或宽是为了更好的收敛。
类似分类概率,我们同样用 填充
的卷积来预测偏移。这次不同的是,对于每个预设框,我们只需要
个通道来预测偏移量, 一共需要
个通道,第
个预设框对应的偏移量存在通道
到通道
之间。
def box_predictor(num_anchors):
"""return a layer to predict delta locations"""
return nn.Conv2D(num_anchors * 4, 3, padding=1)
box_pred = box_predictor(10)
box_pred.initialize()
x = nd.zeros((2, 3, 20, 20))
print('Box prediction', box_pred(x).shape)Box prediction (2, 40, 20, 20)
下采样特征层 Down-sample features
每次我们下采样特征层到一半的长宽,用Pooling(池化)操作就可以轻松的做到,当然也可以用stride(步长)为2的卷积直接得到。在下采样之前,我们会希望增加几层卷积层作为缓冲,防止特征值对应多尺度带来的混乱,同时又能增加网络的深度,得到更好的抽象。
def down_sample(num_filters):
"""stack two Conv-BatchNorm-Relu blocks and then a pooling layer
to halve the feature size"""
out = nn.HybridSequential()
for _ in range(2):
out.add(nn.Conv2D(num_filters, 3, strides=1, padding=1))
out.add(nn.BatchNorm(in_channels=num_filters))
out.add(nn.Activation('relu'))
out.add(nn.MaxPool2D(2))
return out
blk = down_sample(10)
blk.initialize()
x = nd.zeros((2, 3, 20, 20))
print('Before', x.shape, 'after', blk(x).shape)Before (2, 3, 20, 20) after (2, 10, 10, 10)
整合多个特征层预测值 Manage predictions from multiple layers
SSD算法的一个关键点在于它用到了多尺度的特征层来预测不同大小的物体。相对来说,浅层的特征层的空间尺度更大,越到网络的深层,空间尺度越小,最后我们往往下采样直到 ,用来预测全图大小的物体。所以每个特征层产生的预设框, 分类概率,框偏移量需要被整合起来统一在全图与真实的物体比较。 为了做到一一对应,我们统一把所有的预设框, 分类概率,框偏移量 平铺再连接。得到的是按顺序排列但是摊平的所有预测值和预设框。
# 随便创建一个大小为 20x20的预测层
feat1 = nd.zeros((2, 8, 20, 20))
print('Feature map 1', feat1.shape)
cls_pred1 = class_predictor(5, 10)
cls_pred1.initialize()
y1 = cls_pred1(feat1)
print('Class prediction for feature map 1', y1.shape)
# 下采样
ds = down_sample(16)
ds.initialize()
feat2 = ds(feat1)
print('Feature map 2', feat2.shape)
cls_pred2 = class_predictor(3, 10)
cls_pred2.initialize()
y2 = cls_pred2(feat2)
print('Class prediction for feature map 2', y2.shape)Feature map 1 (2, 8, 20, 20)
Class prediction for feature map 1 (2, 55, 20, 20)
Feature map 2 (2, 16, 10, 10)
Class prediction for feature map 2 (2, 33, 10, 10)
def flatten_prediction(pred):
return nd.flatten(nd.transpose(pred, axes=(0, 2, 3, 1)))
def concat_predictions(preds):
return nd.concat(*preds, dim=1)
flat_y1 = flatten_prediction(y1)
print('Flatten class prediction 1', flat_y1.shape)
flat_y2 = flatten_prediction(y2)
print('Flatten class prediction 2', flat_y2.shape)
print('Concat class predictions', concat_predictions([flat_y1, flat_y2]).shape)Flatten class prediction 1 (2, 22000)
Flatten class prediction 2 (2, 3300)
Concat class predictions (2, 25300)
我们总是确保在 上连接,以免打乱一一对应的关系。
主干网络 Body network
主干网络用来从原始图像输入提取特征。 一般来说我们会用预先训练好的用于分类的高性能网络(VGG, ResNet等)来提取特征。
在这里我们就简单地堆叠几层卷积和下采样层作为主干网络的演示。
from mxnet import gluon
def body():
"""return the body network"""
out = nn.HybridSequential()
for nfilters in [16, 32, 64]:
out.add(down_sample(nfilters))
return out
bnet = body()
bnet.initialize()
x = nd.zeros((2, 3, 256, 256))
print('Body network', [y.shape for y in bnet(x)])Body network [(64, 32, 32), (64, 32, 32)]
设计一个简单的SSD示意网络 Create a toy SSD model
我们这里介绍一个示意用的简单SSD网络,出于速度的考量,输入图像尺寸定为 。
def toy_ssd_model(num_anchors, num_classes):
"""return SSD modules"""
downsamples = nn.Sequential()
class_preds = nn.Sequential()
box_preds = nn.Sequential()
downsamples.add(down_sample(128))
downsamples.add(down_sample(128))
downsamples.add(down_sample(128))
for scale in range(5):
class_preds.add(class_predictor(num_anchors, num_classes))
box_preds.add(box_predictor(num_anchors))
return body(), downsamples, class_preds, box_preds
print(toy_ssd_model(5, 2))(HybridSequential(
(0): HybridSequential(
(0): Conv2D(16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): BatchNorm(fix_gamma=False, axis=1, momentum=0.9, eps=1e-05, in_channels=16)
(2): Activation(relu)
(3): Conv2D(16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(4): BatchNorm(fix_gamma=False, axis=1, momentum=0.9, eps=1e-05, in_channels=16)
(5): Activation(relu)
(6): MaxPool2D(size=(2, 2), stride=(2, 2), padding=(0, 0), ceil_mode=False)
)
(1): HybridSequential(
(0): Conv2D(32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): BatchNorm(fix_gamma=False, axis=1, momentum=0.9, eps=1e-05, in_channels=32)
(2): Activation(relu)
(3): Conv2D(32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(4): BatchNorm(fix_gamma=False, axis=1, momentum=0.9, eps=1e-05, in_channels=32)
(5): Activation(relu)
(6): MaxPool2D(size=(2, 2), stride=(2, 2), padding=(0, 0), ceil_mode=False)
)
(2): HybridSequential(
(0): Conv2D(64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): BatchNorm(fix_gamma=False, axis=1, momentum=0.9, eps=1e-05, in_channels=64)
(2): Activation(relu)
(3): Conv2D(64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(4): BatchNorm(fix_gamma=False, axis=1, momentum=0.9, eps=1e-05, in_channels=64)
(5): Activation(relu)
(6): MaxPool2D(size=(2, 2), stride=(2, 2), padding=(0, 0), ceil_mode=False)
)
), Sequential(
(0): HybridSequential(
(0): Conv2D(128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): BatchNorm(fix_gamma=False, axis=1, momentum=0.9, eps=1e-05, in_channels=128)
(2): Activation(relu)
(3): Conv2D(128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(4): BatchNorm(fix_gamma=False, axis=1, momentum=0.9, eps=1e-05, in_channels=128)
(5): Activation(relu)
(6): MaxPool2D(size=(2, 2), stride=(2, 2), padding=(0, 0), ceil_mode=False)
)
(1): HybridSequential(
(0): Conv2D(128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): BatchNorm(fix_gamma=False, axis=1, momentum=0.9, eps=1e-05, in_channels=128)
(2): Activation(relu)
(3): Conv2D(128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(4): BatchNorm(fix_gamma=False, axis=1, momentum=0.9, eps=1e-05, in_channels=128)
(5): Activation(relu)
(6): MaxPool2D(size=(2, 2), stride=(2, 2), padding=(0, 0), ceil_mode=False)
)
(2): HybridSequential(
(0): Conv2D(128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): BatchNorm(fix_gamma=False, axis=1, momentum=0.9, eps=1e-05, in_channels=128)
(2): Activation(relu)
(3): Conv2D(128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(4): BatchNorm(fix_gamma=False, axis=1, momentum=0.9, eps=1e-05, in_channels=128)
(5): Activation(relu)
(6): MaxPool2D(size=(2, 2), stride=(2, 2), padding=(0, 0), ceil_mode=False)
)
), Sequential(
(0): Conv2D(15, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): Conv2D(15, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(2): Conv2D(15, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): Conv2D(15, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(4): Conv2D(15, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
), Sequential(
(0): Conv2D(20, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): Conv2D(20, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(2): Conv2D(20, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): Conv2D(20, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(4): Conv2D(20, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
))
网络前向推导 Forward
既然我们已经设计完网络结构了,接下来可以定义网络前向推导的步骤。
首先得到主干网络的输出,然后对于每一个特征预测层,推导当前层的预设框,分类概率和偏移量。最后我们把这些输入摊平,连接,作为网络的输出。
def toy_ssd_forward(x, body, downsamples, class_preds, box_preds, sizes, ratios):
# 计算主干网络的输出
x = body(x)
# 在每个预测层, 计算预设框,分类概率,偏移量
# 然后在下采样到下一层预测层,重复
default_anchors = []
predicted_boxes = []
predicted_classes = []
for i in range(5):
default_anchors.append(MultiBoxPrior(x, sizes=sizes[i], ratios=ratios[i]))
predicted_boxes.append(flatten_prediction(box_preds[i](x)))
predicted_classes.append(flatten_prediction(class_preds[i](x)))
if i < 3:
x = downsamples[i](x)
elif i == 3:
# 最后一层可以简单地用全局Pooling
x = nd.Pooling(x, global_pool=True, pool_type='max', kernel=(4, 4))
return default_anchors, predicted_classes, predicted_boxes打包收工 Put all things together
from mxnet import gluon
class ToySSD(gluon.Block):
def __init__(self, num_classes, **kwargs):
super(ToySSD, self).__init__(**kwargs)
# 5个预测层,每层负责的预设框尺寸不同,由小到大,符合网络的形状
self.anchor_sizes = [[.2, .272], [.37, .447], [.54, .619], [.71, .79], [.88, .961]]
# 每层的预设框都用 1,2,0.5作为长宽比候选
self.anchor_ratios = [[1, 2, .5]] * 5
self.num_classes = num_classes
with self.name_scope():
self.body, self.downsamples, self.class_preds, self.box_preds = toy_ssd_model(4, num_classes)
def forward(self, x):
default_anchors, predicted_classes, predicted_boxes = toy_ssd_forward(x, self.body, self.downsamples,
self.class_preds, self.box_preds, self.anchor_sizes, self.anchor_ratios)
# 把从每个预测层输入的结果摊平并连接,以确保一一对应
anchors = concat_predictions(default_anchors)
box_preds = concat_predictions(predicted_boxes)
class_preds = concat_predictions(predicted_classes)
# 改变下形状,为了更方便地计算softmax
class_preds = nd.reshape(class_preds, shape=(0, -1, self.num_classes + 1))
return anchors, class_preds, box_preds网络输出示意 Outputs of ToySSD
# 新建一个2个正类的SSD网络
net = ToySSD(2)
net.initialize()
x = nd.zeros((1, 3, 256, 256))
default_anchors, class_predictions, box_predictions = net(x)
print('Outputs:', 'anchors', default_anchors.shape, 'class prediction', class_predictions.shape, 'box prediction', box_predictions.shape)Outputs: anchors (1, 5444, 4) class prediction (1, 5444, 3) box prediction (1, 21776)
数据集 Dataset
聊了半天怎么构建一个虚无的网络,接下来看看真正有意思的东西。
我们用3D建模批量生成了一个皮卡丘的数据集,产生了1000张图片作为这个展示用的训练集。这个数据集里面,皮神会以各种角度,各种姿势出现在各种背景图中,就像Pokemon Go里增强现实那样炫酷。
因为是生成的数据集,我们自然可以得到每只皮神的真实坐标和大小,用来作为训练的真实标记。

下载数据集 Download dataset
下载提前准备好的数据集并验证
from mxnet.test_utils import download
import os.path as osp
def verified(file_path, sha1hash):
import hashlib
sha1 = hashlib.sha1()
with open(file_path, 'rb') as f:
while True:
data = f.read(1048576)
if not data:
break
sha1.update(data)
matched = sha1.hexdigest() == sha1hash
if not matched:
print('Found hash mismatch in file {}, possibly due to incomplete download.'.format(file_path))
return matched
url_format = 'https://apache-mxnet.s3-accelerate.amazonaws.com/gluon/datasets/pikachu/{}'
hashes = {'train.rec': 'e6bcb6ffba1ac04ff8a9b1115e650af56ee969c8',
'train.idx': 'dcf7318b2602c06428b9988470c731621716c393',
'val.rec': 'd6c33f799b4d058e82f2cb5bd9a976f69d72d520'}
for k, v in hashes.items():
fname = 'pikachu_' + k
target = osp.join('data', fname)
url = url_format.format(k)
if not osp.exists(target) or not verified(target, v):
print('Downloading', target, url)
download(url, fname=fname, dirname='data', overwrite=True)加载数据 Load dataset
加载数据可以用mxnet.image.ImageDetIter,同时还提供了大量数据增强的选项,比如翻转,随机截取等等。
import mxnet.image as image
data_shape = 256
batch_size = 32
def get_iterators(data_shape, batch_size):
class_names = ['pikachu']
num_class = len(class_names)
train_iter = image.ImageDetIter(
batch_size=batch_size,
data_shape=(3, data_shape, data_shape),
path_imgrec='./data/pikachu_train.rec',
path_imgidx='./data/pikachu_train.idx',
shuffle=True,
mean=True,
rand_crop=1,
min_object_covered=0.95,
max_attempts=200)
val_iter = image.ImageDetIter(
batch_size=batch_size,
data_shape=(3, data_shape, data_shape),
path_imgrec='./data/pikachu_val.rec',
shuffle=False,
mean=True)
return train_iter, val_iter, class_names, num_class
train_data, test_data, class_names, num_class = get_iterators(data_shape, batch_size)
batch = train_data.next()
print(batch)DataBatch: data shapes: [(32, 3, 256, 256)] label shapes: [(32, 1, 5)]
示意图 Illustration
加载的训练数据还可以显示出来看看到底是怎么样的。
import numpy as np
img = batch.data[0][0].asnumpy() # 取第一批数据中的第一张,转成numpy
img = img.transpose((1, 2, 0)) # 交换下通道的顺序
img += np.array([123, 117, 104])
img = img.astype(np.uint8) # 图片应该用0-255的范围
# 在图上画出真实标签的方框
for label in batch.label[0][0].asnumpy():
if label[0] < 0:
break
print(label)
xmin, ymin, xmax, ymax = [int(x * data_shape) for x in label[1:5]]
rect = plt.Rectangle((xmin, ymin), xmax - xmin, ymax - ymin, fill=False, edgecolor=(1, 0, 0), linewidth=3)
plt.gca().add_patch(rect)
plt.imshow(img)
plt.show()[ 0. 0.75724518 0.34316057 0.93332517 0.70017999]

训练 Train
损失函数 Losses
通过定义损失函数,我们可以让网络收敛到我们希望得到的目标检测功能,也就是说,我们希望网络能正确预测物体的类别,同时能预测出准确的预设框偏移量,以正确地显示物体的真正大小和位置。
这个预测的类别和偏移量都是可以通过真实标签和网络的当前预测值得到,在这里我们用MultiBoxTarget层来计算,其中包含了预测框和真实标签的匹配,正类和负类的选择,就不一一详述了。(详情见论文 SSD: Single Shot MultiBox Detector)。
from mxnet.contrib.ndarray import MultiBoxTarget
def training_targets(default_anchors, class_predicts, labels):
class_predicts = nd.transpose(class_predicts, axes=(0, 2, 1))
z = MultiBoxTarget(*[default_anchors, labels, class_predicts])
box_target = z[0] # 预设框偏移量 (x, y, width, height)
box_mask = z[1] # box_mask用来把负类的偏移量置零,因为背景不需要位置!
cls_target = z[2] # 每个预设框应该对应的分类
return box_target, box_mask, cls_target在gluon.loss中有很多预设的损失函数可以选择,当然我们也可以快速地手写一些损失函数。
首先,对于物体分类的概率,平时我们往往用交叉墒,不过在目标检测中,我们有大量非平衡的负类(背景),那么 Focal Loss会是一个很好的选择(详情见论文 Focal Loss for Dense Object Detection)。
class FocalLoss(gluon.loss.Loss):
def __init__(self, axis=-1, alpha=0.25, gamma=2, batch_axis=0, **kwargs):
super(FocalLoss, self).__init__(None, batch_axis, **kwargs)
self._axis = axis
self._alpha = alpha
self._gamma = gamma
def hybrid_forward(self, F, output, label):
output = F.softmax(output)
pt = F.pick(output, label, axis=self._axis, keepdims=True)
loss = -self._alpha * ((1 - pt) ** self._gamma) * F.log(pt)
return F.mean(loss, axis=self._batch_axis, exclude=True)
# cls_loss = gluon.loss.SoftmaxCrossEntropyLoss()
cls_loss = FocalLoss()
print(cls_loss)FocalLoss(batch_axis=0, w=None)
接下来是一个流行的 SmoothL1 损失函数,用来惩罚不准确的预设框偏移量。
class SmoothL1Loss(gluon.loss.Loss):
def __init__(self, batch_axis=0, **kwargs):
super(SmoothL1Loss, self).__init__(None, batch_axis, **kwargs)
def hybrid_forward(self, F, output, label, mask):
loss = F.smooth_l1((output - label) * mask, scalar=1.0)
return F.mean(loss, self._batch_axis, exclude=True)
box_loss = SmoothL1Loss()
print(box_loss)SmoothL1Loss(batch_axis=0, w=None)
衡量性能指标 Evaluate metrics
我们在训练时需要一些指标来衡量训练是否顺利,我们这里用准确率衡量分类的性能,用平均绝对误差衡量偏移量的预测能力。这些指标对网络本身没有任何影响,只是用于观测。
cls_metric = mx.metric.Accuracy()
box_metric = mx.metric.MAE() # measure absolute difference between prediction and target选择训练用的设备 Set context for training
ctx = mx.gpu() # 用GPU加速训练过程
try:
_ = nd.zeros(1, ctx=ctx)
# 为了更有效率,cuda实现需要少量的填充,不影响结果
train_data.reshape(label_shape=(3, 5))
train_data = test_data.sync_label_shape(train_data)
except mx.base.MXNetError as err:
# 没有gpu也没关系,交给cpu慢慢跑
print('No GPU enabled, fall back to CPU, sit back and be patient...')
ctx = mx.cpu()初始化网络参数 Initialize parameters
net = ToySSD(num_class)
net.initialize(mx.init.Xavier(magnitude=2), ctx=ctx)用gluon.Trainer简化训练过程 Set up trainer
gluon.Trainer能简化优化网络参数的过程,免去对各个参数单独更新的痛苦。
net.collect_params().reset_ctx(ctx)
trainer = gluon.Trainer(net.collect_params(), 'sgd', {'learning_rate': 0.1, 'wd': 5e-4})开始训练 Start training
既然是简单的示例,我们不想花费太多的时间来训练网络,所以会预加载训练过一段时间的网络参数继续训练。
如果你感兴趣的话,可以设置
from_scratch = True这样网络就会从初始的随机参数开始训练。
一般从头训练用单个gpu会花费半个多小时。
epochs = 150 # 设大一点的值来得到更好的结果
log_interval = 20
from_scratch = False # 设为True就可以从头开始训练
if from_scratch:
start_epoch = 0
else:
start_epoch = 148
pretrained = 'ssd_pretrained.params'
sha1 = 'fbb7d872d76355fff1790d864c2238decdb452bc'
url = 'https://apache-mxnet.s3-accelerate.amazonaws.com/gluon/models/ssd_pikachu-fbb7d872.params'
if not osp.exists(pretrained) or not verified(pretrained, sha1):
print('Downloading', pretrained, url)
download(url, fname=pretrained, overwrite=True)
net.load_params(pretrained, ctx)喝咖啡的时间
import time
from mxnet import autograd as ag
for epoch in range(start_epoch, epochs):
# 重置iterator和时间戳
train_data.reset()
cls_metric.reset()
box_metric.reset()
tic = time.time()
# 迭代每一个批次
for i, batch in enumerate(train_data):
btic = time.time()
# 用autograd.record记录需要计算的梯度
with ag.record():
x = batch.data[0].as_in_context(ctx)
y = batch.label[0].as_in_context(ctx)
default_anchors, class_predictions, box_predictions = net(x)
box_target, box_mask, cls_target = training_targets(default_anchors, class_predictions, y)
# 损失函数计算
loss1 = cls_loss(class_predictions, cls_target)
loss2 = box_loss(box_predictions, box_target, box_mask)
# 1比1叠加两个损失函数,也可以加权重
loss = loss1 + loss2
# 反向推导
loss.backward()
# 用trainer更新网络参数
trainer.step(batch_size)
# 更新下衡量的指标
cls_metric.update([cls_target], [nd.transpose(class_predictions, (0, 2, 1))])
box_metric.update([box_target], [box_predictions * box_mask])
if (i + 1) % log_interval == 0:
name1, val1 = cls_metric.get()
name2, val2 = box_metric.get()
print('[Epoch %d Batch %d] speed: %f samples/s, training: %s=%f, %s=%f'
%(epoch ,i, batch_size/(time.time()-btic), name1, val1, name2, val2))
# 打印整个epoch的的指标
name1, val1 = cls_metric.get()
name2, val2 = box_metric.get()
print('[Epoch %d] training: %s=%f, %s=%f'%(epoch, name1, val1, name2, val2))
print('[Epoch %d] time cost: %f'%(epoch, time.time()-tic))
# 还可以把网络的参数存下来以便下次再用
net.save_params('ssd_%d.params' % epochs)[Epoch 148 Batch 19] speed: 109.217423 samples/s, training: accuracy=0.997539, mae=0.001862
[Epoch 148] training: accuracy=0.997610, mae=0.001806
[Epoch 148] time cost: 17.762958
[Epoch 149 Batch 19] speed: 110.492729 samples/s, training: accuracy=0.997607, mae=0.001824
[Epoch 149] training: accuracy=0.997692, mae=0.001789
[Epoch 149] time cost: 15.353258
测试 Test
接下来就是 的时刻,我们用训练好的网络来测试一张图片。
网络推导的过程和训练很相似,只不过我们不再需要计算真值和损失函数,也不再需要更新网络的参数,一次推导就可以得到结果。
准备测试数据 Prepare the test data
我们需要读取一张图片,稍微调整到网络需要的结构,比如说我们需要调整图片通道的顺序,减去平均值等等惯用的方法。
import numpy as np
import cv2
def preprocess(image):
"""Takes an image and apply preprocess"""
# 调整图片大小成网络的输入
image = cv2.resize(image, (data_shape, data_shape))
# 转换 BGR 到 RGB
image = image[:, :, (2, 1, 0)]
# 减mean之前先转成float
image = image.astype(np.float32)
# 减 mean
image -= np.array([123, 117, 104])
# 调成为 [batch-channel-height-width]
image = np.transpose(image, (2, 0, 1))
image = image[np.newaxis, :]
# 转成 ndarray
image = nd.array(image)
return image
image = cv2.imread('img/pikachu.jpg')
x = preprocess(image)
print('x', x.shape)x (1, 3, 256, 256)
网络推导 Network inference
只要一行代码,输入处理完的图片,输出我们要的所有预测值和预设框。
# 如果有预先训练好的网络参数,可以直接加载
# net.load_params('ssd_%d.params' % epochs, ctx)
anchors, cls_preds, box_preds = net(x.as_in_context(ctx))
print('anchors', anchors)
print('class predictions', cls_preds)
print('box delta predictions', box_preds)anchors
[[[-0.084375 -0.084375 0.115625 0.115625 ]
[-0.12037501 -0.12037501 0.15162501 0.15162501]
[-0.12579636 -0.05508568 0.15704636 0.08633568]
...,
[ 0.01949999 0.01949999 0.98049998 0.98049998]
[-0.12225395 0.18887302 1.12225389 0.81112695]
[ 0.18887302 -0.12225395 0.81112695 1.12225389]]]
<NDArray 1x5444x4 @gpu(0)>
class predictions
[[[ 0.33754104 -1.64660323]
[ 1.15297699 -1.77257478]
[ 1.1535604 -0.98352218]
...,
[-0.27562004 -1.29400492]
[ 0.45524898 -0.88782215]
[ 0.20327765 -0.94481993]]]
<NDArray 1x5444x2 @gpu(0)>
box delta predictions
[[-0.16735925 -0.13083346 -0.68860865 ..., -0.18972112 0.11822788
-0.27067867]]
<NDArray 1x21776 @gpu(0)>
是不是看着还很奇怪,别着急,还差最后一步
转换为可读的输出 Convert predictions to real object detection results
要把网络输出转换成我们需要的坐标,还要最后一步,比如我们需要softmax把分类预测转换成概率,还需要把偏移量和预设框结合来得到物体的大小和位置。
非极大抑制(Non-Maximum Suppression)也是必要的一步,因为一个物体往往有不只一个检测框。
from mxnet.contrib.ndarray import MultiBoxDetection
# 跑一下softmax, 转成0-1的概率
cls_probs = nd.SoftmaxActivation(nd.transpose(cls_preds, (0, 2, 1)), mode='channel')
# 把偏移量加到预设框上,去掉得分很低的,跑一遍nms,得到最终的结果
output = MultiBoxDetection(*[cls_probs, box_preds, anchors], force_suppress=True, clip=False)
print(output)[[[ 0. 0.61178613 0.51807499 0.5042429 0.67325425 0.70118797]
[-1. 0.59466797 0.52491206 0.50917625 0.66228026 0.70489514]
[-1. 0.5731774 0.53843218 0.50217044 0.66522425 0.7118448 ]
...,
[-1. -1. -1. -1. -1. -1. ]
[-1. -1. -1. -1. -1. -1. ]
[-1. -1. -1. -1. -1. -1. ]]]
<NDArray 1x5444x6 @gpu(0)>
结果中,每一行都是一个可能的结果框,表示为[类别id, 得分, 左边界,上边界,右边界,下边界],有很多-1的原因是网络预测到这些都是背景,或者作为被抑制的结果。
显示结果 Display results
数字永远不如图片来得直观
把得到的转换结果画在图上,就得到我们期待已久的几十万伏特图了!
def display(img, out, thresh=0.5):
import random
import matplotlib as mpl
mpl.rcParams['figure.figsize'] = (10,10)
pens = dict()
plt.clf()
plt.imshow(img)
for det in out:
cid = int(det[0])
if cid < 0:
continue
score = det[1]
if score < thresh:
continue
if cid not in pens:
pens[cid] = (random.random(), random.random(), random.random())
scales = [img.shape[1], img.shape[0]] * 2
xmin, ymin, xmax, ymax = [int(p * s) for p, s in zip(det[2:6].tolist(), scales)]
rect = plt.Rectangle((xmin, ymin), xmax - xmin, ymax - ymin, fill=False,
edgecolor=pens[cid], linewidth=3)
plt.gca().add_patch(rect)
text = class_names[cid]
plt.gca().text(xmin, ymin-2, '{:s} {:.3f}'.format(text, score),
bbox=dict(facecolor=pens[cid], alpha=0.5),
fontsize=12, color='white')
plt.show()
display(image[:, :, (2, 1, 0)], output[0].asnumpy(), thresh=0.45)
小结 Conclusion
目标检测不同于分类任务,需要考虑的不只是全图尺度的单一分类,而是需要检测到不同大小,不同位置的物体,难度自然提升了许多,用扫窗之类的传统方法早已不适合神经网络这种需要大量计算需求的新结构。幸好我们可以用本章节介绍的方法,利用卷积网络的特性,一次推导得到全部的预测结果,相对来说快速且准确。
相关链接
Apache MXNet官方网站:https://mxnet.incubator.apache.org/
Github Repo: zackchase/mxnet-the-straight-dope
英文版教程: Object Detection Using Convolutional Neural Networks
Eric知乎介绍0.11 新特性:https://zhuanlan.zhihu.com/p/28648399
0.11 Release:https://github.com/apache/incubator-mxnet/releases
安装指南:https://mxnet.incubator.apache.org/versions/master/get_started/install.html
其他Gluon教程:http://gluon.mxnet.io/
Gluon讲座PPT: https://github.com/zackchase/mxnet-slides/blob/master/kdd-mxnet-slides.pdf
Gluon深度学习样例:https://github.com/apache/incubator-mxnet/tree/master/example/gluon
SSD: Single Shot MultiBox Detector
Focal Loss: [1708.02002] Focal Loss for Dense Object Detection
皮卡丘检测器-CNN目标检测入门教程的更多相关文章
- CNN目标检测系列算法发展脉络——学习笔记(一):AlexNet
在咨询了老师的建议后,最近开始着手深入的学习一下目标检测算法,结合这两天所查到的资料和个人的理解,准备大致将CNN目标检测的发展脉络理一理(暂时只讲CNN系列部分,YOLO和SSD,后面会抽空整理). ...
- [转]CNN目标检测(一):Faster RCNN详解
https://blog.csdn.net/a8039974/article/details/77592389 Faster RCNN github : https://github.com/rbgi ...
- TensorFlow + Keras 实战 YOLO v3 目标检测图文并茂教程
运行步骤 1.从 YOLO 官网下载 YOLOv3 权重 wget https://pjreddie.com/media/files/yolov3.weights 下载过程如图: 2.转换 Darkn ...
- 目标检测入门论文YOLOV1精读以及pytorch源码复现(yolov1)
结果展示 其中绿线是我绘制的图像划分网格. 这里的loss是我训练的 0.77 ,由于损失函数是我自己写的,所以可能跟大家的不太一样,这个不重要,重要的是学习思路. 重点提示 yolov1是一个目标检 ...
- 标题 发布状态 评论数 阅读数 操作 操作 CNN目标检测系列算法发展脉络简析——学习笔记(三):Fast R-CNN
最近两周忙着上网课.投简历,博客没什么时间写,姑且把之前做的笔记放上来把... 下面是我之前看论文时记的笔记,之间copy上来了,内容是Fast R-CNN的,以后如果抽不出时间写博客,就放笔记上来( ...
- CNN之yolo目标检测算法笔记
本文并不是详细介绍yolo工作原理以及改进发展的文章,只用做作者本人回想与提纲. 1.yolo是什么 输入一张图片,输出图片中检测到的目标和位置(目标的边框) yolo名字含义:you only lo ...
- YOLO_Online 将深度学习最火的目标检测做成在线服务实战经验分享
YOLO_Online 将深度学习最火的目标检测做成在线服务 第一次接触 YOLO 这个目标检测项目的时候,我就在想,怎么样能够封装一下让普通人也能够体验深度学习最火的目标检测项目,不需要关注技术细节 ...
- 目标检测(七)YOLOv3: An Incremental Improvement
项目地址 Abstract 该技术报告主要介绍了作者对 YOLOv1 的一系列改进措施(注意:不是对YOLOv2,但是借鉴了YOLOv2中的部分改进措施).虽然改进后的网络较YOLOv1大一些,但是检 ...
- yolov5实战之皮卡丘检测
前言 从接触深度学习开始一直都做的是人脸识别,基本上也一直都在用mxnet. 记得之前在刚接触的时候看到博客中写到,深度学习分三个层次,第一个层次是分类,第二个层次是检测,第三个层次是分割.人脸识别算 ...
随机推荐
- Python之安装pip
安装Python之后,命令行语句定位到其安装目录下的Scripts目录 如我的安装目录是:D:\python\Scripts 然后执行命令:easy_install.exe pip就会开始安装pip ...
- Webpack 的 Tree Shaking
为什么要使用 Tree Shaking? 当从某文件模块中导出(某一个或几个变量.函数.对象等),然而这个文件模块还有许多其它(我们这次并不需要)的导出,webpack会不管三七二十一简单粗暴的将整个 ...
- apache HTML5 History 模式 配置
说明 使用的 Apache/2.4.6 版本. 文档这么写的: 但是 没说 IfModule 放在哪里 . httpd.conf 里面有大量的 IfModule . 这样的.但是实测 无效.无 ...
- jmeter之Throughput Controller
jmeter之Throughput Controller Throughput Controller 这个控制器的命名不准确,因为它不是用来控制吞吐量的.吞吐量控制器允许用户控制执行频率,jmeter ...
- CenterOS下安装Nginx
1. 安装gcc 检查版本命令 gcc -v 安装命令 yum install gcc-c++ 2. 安装pcre 命令 yum install prce-devel 3. 安装zlib 命令 yu ...
- 自然语言处理工具hanlp自定义词汇添加图解
过程分析 1.添加新词需要确定无缓存文件,否则无法使用成功,因为词典会优先加载缓存文件 2.再确认缓存文件不在时,打开本地词典按照格式添加自定义词汇. 3.调用分词函数重新生成缓存文件,这时会报一个找 ...
- MySQL状态变量详解
MySQL状态变量详解 mysql的状态变量(status variables)记录的mysql服务器的运行状态信息.查看语法如下: SHOW [GLOBAL | SESSION] STATUS; S ...
- PICT测试工具的安装及使用
PICT工具就是在微软公司出品一款成对组合的命令行生成工具,现在已经对外提供,可以在互联网上下载到 .PICT 可以有效地按照两两测试的原理,进行测试用例设计.在使用PICT时,需要输入与测试用例相关 ...
- ubuntu 阿里云 常出问题 运维工作日志
一.2015-8.26(数据库 error—28) tmp文件临时数据写入不了----解决办法 1.查看临时文件 ls -l 找到了 2.由此可以查看得出来tmp文件有的权限是有的 3.查看tmp 存 ...
- mongodb 安装(官方说明链接)
这里面有很全的 https://docs.mongodb.com/manual/tutorial/install-mongodb-on-windows/ 先截个图吧,都是标准的流程,按照操作,是可以安 ...