第十一章节 BJROBOT PS3 手柄控制【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车架空平放在地板上。
2.用 USB 线将 PS3 蓝牙手柄连接至小车主控端,初次连接手柄上的 4 个红色指示灯会同时闪烁;
3.按下手柄中间的圆形配对键,然后等待红灯闪烁至停止。
4.此时手柄只有一个红灯常亮,再次插拔 USB 线后,还是只有一个红灯常亮,说明已经匹配成功了。
5.把手柄放在地上,回到虚拟机端。
6.按下图的步骤,进行蓝牙匹配
7.用资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjrobot bringup.launch。
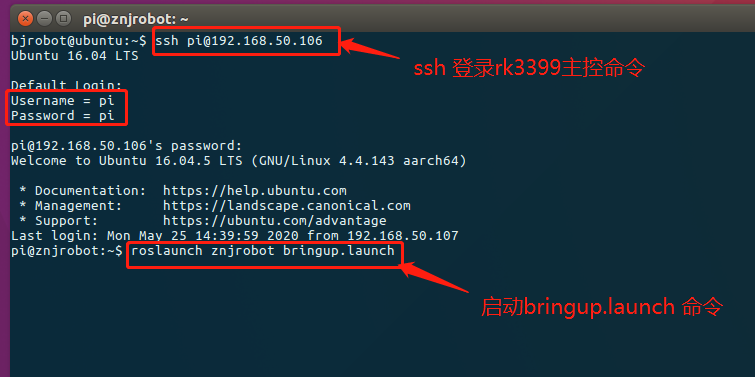
8.再打开一个终端,ssh 过去主控端启动 roslaunch znjrobot ps3.launch
9.此时按住下图所示手柄左上方的 2 号键,进入低速度模式,然后通过左边的摇杆控制小车前后左右移动,按住手柄左上方的 1 号键,可进入高速模式。
第十一章节 BJROBOT PS3 手柄控制【ROS全开源阿克曼转向智能网联无人驾驶车】的更多相关文章
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
- 第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第14章节 BJROBOT karto 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot br ...
- 第十八章节 BJROBOT 安卓手机 APP 建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobotbringup.launch 2.在虚拟机端再打开一个终端,ssh 过去主控端启动ro ...
- 第九章节 BJROBOT 多点导航【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.再打开一个终端,ssh 过去主控端启动 rosl ...
- 第八章节 BJROBOT hector 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.在虚拟机端打开一个终端,ssh 过去主控端启动r ...
- 第七章节 BJROBOT 选择区域自主构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch 2.在虚拟机端再打开一个终端,ssh 过去主控端启动r ...
- 第四章节 BJROBOT 线速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
BJROBOT 线速度校正 1.把小车平放在地板上,用卷尺作为测量刻度,选取车头或者车尾处作为小车的起点, 打开资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjro ...
随机推荐
- 强大的拉姆表达式转Sql 类库 - SqlSugar 隐藏功能之Lambda
使用场景 1.Lambda to sql 一直是ORM中最难的功能之一,如果有现成的解析库那么自已写一个ORM难度将大大降低 2.通过Lambda作为KEY进行缓存操作,特别是仓储模式想要拿到表达式进 ...
- PyQt及PyCharm学习中遇到的问题
在PyQt及PyCharm学习过程中,老猿遇到了如下问题: 问题: 刚安装的PyCharm执行代码报"ModuleNotFoundError: No module named XXXX&qu ...
- PyQt学习随笔:QStandardItemModel使用注意事项
老猿Python博文目录 老猿Python博客地址 在使用QStandardItemModel或其派生类作为view对象的数据存储时,有如下几点需要注意: 1.如果是多行多列的数据存储,对应视图如果没 ...
- pytorch 损失函数(nn.BCELoss 和 nn.CrossEntropyLoss)(思考多标签分类问题)
一.BCELoss 二分类损失函数 输入维度为(n, ), 输出维度为(n, ) 如果说要预测二分类值为1的概率,则建议用该函数! 输入比如是3维,则每一个应该是在0--1区间内(随意通常配合sigm ...
- Scrum 冲刺第七天
一.每日站立式会议 1.会议内容 1)进行每日工作汇报 张博愉: 昨天已完成的工作:与林梓琦同学完成发帖模块的交接 今日工作计划:完善发帖模块的点赞.上传图片功能 工作中遇到的困难:Mybatis的一 ...
- BJOI2017 机动训练
落谷.Loj. Description 定义机动路径为: 没有自环 路径至少包含两个格子 从起点开始每一步都向不远离终点的方向移动 相同地形序列指路径上顺序经过的地形序列. 定义机动路径的权值为相同地 ...
- AcWing 334. K匿名序列
大型补档计划 题目链接 就是把序列分成无数段,每段长度 $ >= K$,然后 \([l, r]\) 这段的花费是 \(S[r] - S[l - 1] - (r - l + 1) * a[l]\) ...
- 安装ELK的一些问题
1.使用的是centos6,其linux内核版本为2.6.而Elasticsearch的插件要求至少3.5以上版本 ,禁用这个插件即可.修改elasticsearch.yml文件,在最下面添加如下配置 ...
- AD PCB模块复用
该文档为原创,转发需注明出处!https://www.cnblogs.com/brianblog/ 在画图的时候如果遇到PCB中有多个模块原理图是一模一样的时候,我们便会想能不能偷点懒,只画一个模块, ...
- TP学习—第一天:框架的简单学习;创建应用;
一.框架目录文件的介绍 common 核心函数库目录 conf 框架的核心配置文件 lang 语言包目录 library 核心资源库目录 tpl 不用管,就是几个模板 Thin ...