[Fundamental of Power Electronics]-PART II-8. 变换器传递函数-8.2 变换器传递函数分析
8.2 变换器传递函数分析
接下来,让我们推导基本变换器传递函数中的极点,零点和渐近线增益的解析表达式。
8.2.1 示例:Buck-boost变换器的传递函数
Buck-boost变换器的小信号等效电路模型已经在7.2节中推导完成,其结果这里在图8.31中重新给出。让我们来推导并画出这个电路的控制-输出以及输入-输出的传递函数。
这个变换器包含两个独立的交流输入:控制输入\(\hat{d}(s)\)和直流输入\(\hat{v}_{g}(s)\)。交流输出电压的变化量\(\hat{v}(s)\)可以表示为这两个输入产生的量的叠加:
\]
因此,传递函数\(G_{vd}(s)\)和\(G_{vg}(s)\)可以被定义为:
\]
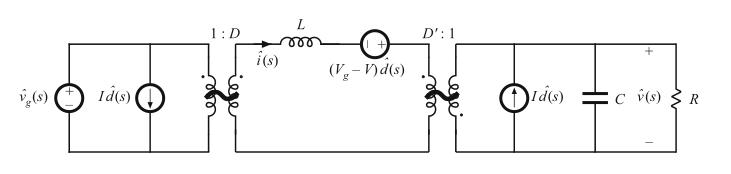
Fig. 8.31 Buck–boost converter equivalent circuit derived in Sect. 7.2
为了确定输入输出传递函数\(G_{vg}(s)\),如图8.32a,我们将\(\hat{d}\)相关的源置零。然后我们可以\(v_{g}(s)\)源和电感经过变压器移动,得到图8.32b所示的电路。利用分压公式可以得到传递函数\(G_{vg}(s)\):
\]
接下来,我们将并联结构展开,表示为有理分数:
G_{vg}(s)=(-\cfrac{D}{D^{'}}) \cfrac{(\cfrac{R}{1+sRC})}{ \cfrac{sL}{D^{'2}}+(1+\cfrac{R}{1+sRC})} \\
=(-\cfrac{D}{D^{'}}) \cfrac{R}{R+\cfrac{sL}{D^{'2}}+\cfrac{s^{2} RLC}{D^{'2}}} \tag{8.129}
\end{matrix}
\]
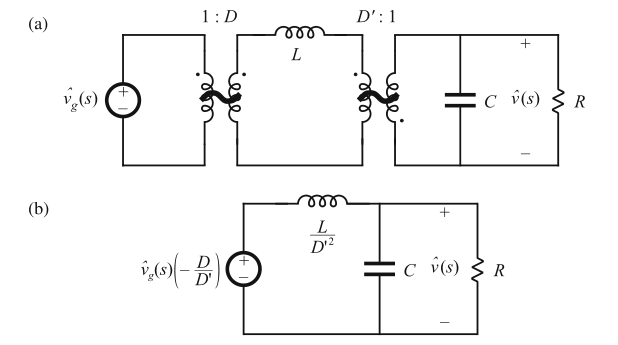
Fig. 8.32 Manipulation of buck–boost equivalent circuit to find the line-to-output transfer function
\(G_{vg}(s)\): (a) set \(\hat{d}(s)\) sources to zero; (b) push inductor and \(\hat{v}_{g}(s)\) source through transformers
现在并没有完成——接下来是将表达式化为标准形式,使得分子多项式和分母多项式中\(s^{0}\)项的系数为1。这可以通过分子和分母同时除以\(R\)来实现:
\]
因此,输入-输出传递函数中包含一个直流增益\(G_{g0}\)和一个二次极点对:
\]
输入-输出传递函数的系数项解析表达式可以通过将式(8.130)和(8.131)中相同项系数相等而得到。直流增益为:
\]
通过令式(8.130)和(8.131)分母中\(s^{2}\)项的系数相等,可以得到:
\]
因此转折角频率为:
\]
令式(8.130)和(8.131)分母中\(s\)项系数相等,得到:
\]
利用式(8.134)消去\(\omega_{0}\)可以得到:
\]
式(8.132),(8.134)和(8.136)就是用来分析输入-输出传递函数的理想结果。这些表达式不仅在求解特征值\(G_{g0},\omega_{0},Q\)等的理论场合有用,其还在为满足给定特征值来选择\(R,L,C\)的元件值的设计场合有用。
由于图8.31中存在三个取决于\(\hat{d}(s)\)的项,因此控制-输出的传递函数推导变得复杂。一个比较好的方法就是像在图7.36中推导规范电路模型中一样来变换电路。这里使用另一种方法,叠加原理。第一部,我们将\(\hat{v}_{g}\)源置零。这简化了\(1:D\)变压器的输入端,并且我们得到了图8.33a所示的电路。接下来,我们将电感和\(\hat{d}\)源经过\(D^{'}:1\)变压器移动到右侧,从而得到了图8.33b。
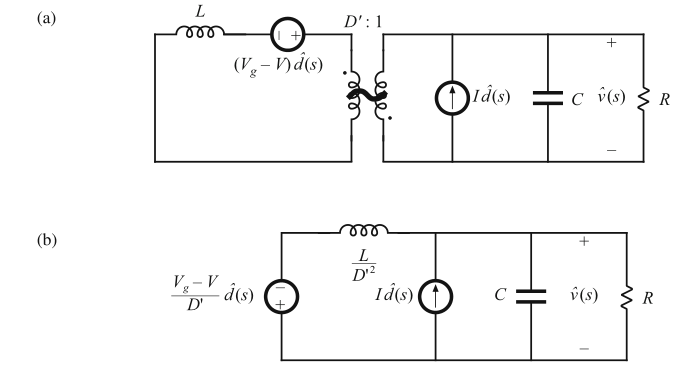
Fig. 8.33 Manipulation of buck–boost equivalent circuit to find the control-to-output transfer function \(G{vd}(s)\): (a) set \(\hat{v}_{g}\) source to zero; (b) push inductor and voltage source through transformer
图8.33b中包含了一个由\(\hat{d}\)控制的受控电压源和受控电流源。因此,传递函数\(G_{vd}(s)\)可以表示为这与两个源相关项的叠加。当电流源置零时(即:开路),获得了图8.34a所示的电路。那么输出\(\hat{v}(s)\)可以表示为:
\]
当电压源被置零时(即:短路),此时电路简化为图8.34b。输出\(\hat{v}(s)\)可以表示为:
\]
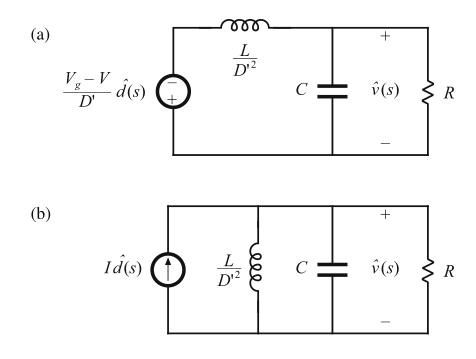
Fig. 8.34 Solution of the model of Fig.8.33b by superposition: (a) current source set to zero; (b) voltage source set to zero
那么传递函数\(G_{vd}(s)\)就是(8.137)和(8.138)的和:
G_{vd}(s)=(-\cfrac{V_{g}-V}{D^{'}}) \cfrac{(R// \cfrac{1}{sC})}{\cfrac{sL}{D^{'2}}+(R// \cfrac{1}{sC})} \\
+I(\cfrac{sL}{D^{'2}}//R//\cfrac{1}{sC})
\end{matrix} \tag{8.139}
\]
经过代数变换,可以得到如下的简化形式:
\]
这个方程具有如下的标准形式:
\]
式(8.140)和(8.130)具有相同的分母,因此\(G_{vd}(s)\)和\(G_{vg}(s)\)具有如式(8.134)和(8.136)的相同的\(\omega_{0}\)和\(Q\)。其直流增益为:
\]
零点的角频率是通过令式(8.140)和(8.141)分子中的\(s\)的系数相等确定的。我们可以得到:
\]
这个零点位于右半平面。通过下面两个直流关系式子使得(8.142)和(8.143)被简化:
V=- \cfrac{D}{D^{'}}V_{g} \\
I=- \cfrac{V}{D^{'}R} \tag{8.144}
\end{matrix}
\]
式(8.134)(8.136)和(8.142)以及(8.143)构成了控制-输出传递函数的分析结果:特征值\(\omega_{0},Q,G_{d0},\omega_{z}\)的解析表达式。这些表达式可以用来选择元件的值从而获得给的特征期望值。
确定传递函数的特征值的解析表达式后,现在我们可以代入数值并构造bode图。假设我们得到了如下的值:
& D=0.6 \\
& R=10 \Omega \\
& V_{g}=30V \\
& L=160 \mu H \\
& C=160 \mu F
\end{aligned} \tag{8.145}
\]
我们可以根据式(8.132),(8.134),(8.136)和(8.142)以及(8.143)来确定传递函数的特征值。结果为:
& |G_{g0}|=\cfrac{D}{D^{'}}=1.5 \Rightarrow3.5\ dB \\
& |G_{d0}|=\cfrac{|V|}{DD^{'}}=187.5V \Rightarrow 45.5\ dB \\
& f_{0}=\cfrac{\omega_{0}}{2 \pi}=\cfrac{D^{'}}{2 \pi \sqrt{LC}}=400 Hz \\
& Q=D^{'}R \sqrt{\cfrac{C}{R}}=4 \Rightarrow 12\ dB \\
& f_{z}=\cfrac{\omega_{z}}{2 \pi}=\cfrac{D^{'2}R}{2 \pi DL}=2.65\ kHz
\end{aligned} \tag{8.146}
\]
图8.35给出了\(G_{vd}\)的幅值和相位的bode图。传递函数包含\(45.5\ dBV\)的直流增益,\(Q\)值为\(4 \Rightarrow\ 12\ dB\)的400Hz的谐振极点对,以及2.65 kHz的右半平面零点。一对谐振极点为高频相位渐近线贡献了-180°,而右半平面零点贡献了-90°。此外,Buck-boost的反相特性使得相位具有180°的反转,这并未包含在图8.35中。
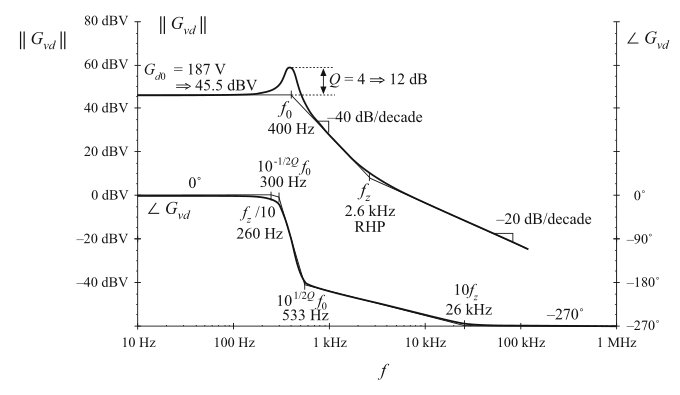
Fig. 8.35 Bode plot of the control-to-output transfer function \(G_{vd}\), buck–boost converter example. Phase reversal owing to output voltage inversion is not included
输入-输出传递函数的幅值和相位bode图如图8.36所示。该传递函数在400 Hz处包含相同的谐振极点对,但并无右半平面零点。其直流增益\(G_{g0}\)等于变换器的直流变换比\(M(D)\)。同样的,由于Buck-boost变换器的输出反相特性带来的180°相位反转并未考虑在图内。
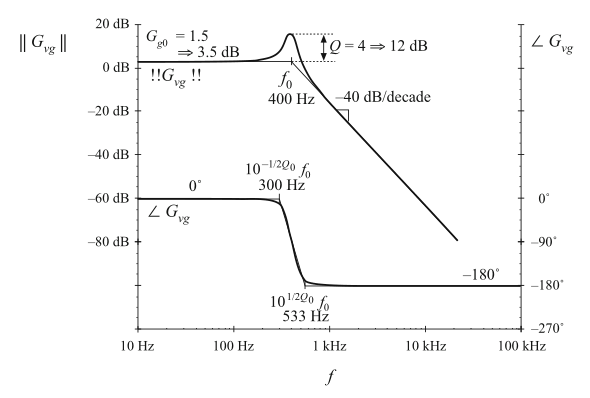
Fig. 8.36 Bode plot of the line-to-output transfer function \(G_{vg}\), buck–boost converter example. Phase reversal owing to output voltage inversion is not included
8.2.2 一些基本CCM变换器的传递函数
表8.2总结了基本buck,boost和Buck-boost变换器的输入-输出传递函数的特征值。在不同的电路中,控制-输出传递函数都具有以下形式:
\]
并且,输入-输出传递函数都具有以下形式:
\]
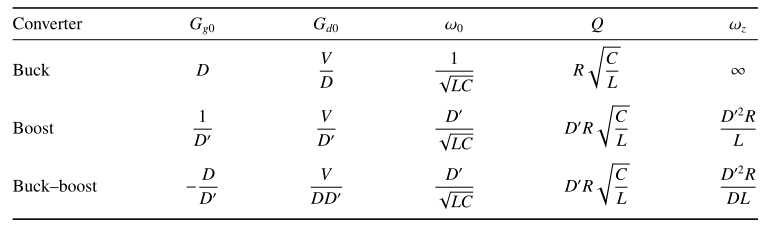
Table 8.2 Salient features of the small-signal CCM transfer functions of some basic dc–dc converters
在Boost和Buck-boost变换器的控制-输出传递函数中,包含两个极点和一个右半平面零点。而buck变换器的\(G_{vd}(s)\)中有两个极点但无零点。三个理想变换器的输入-输出传递函数中均只有两个极点,无零点。这些结果可以轻松适用于buck,boost和Buck-boost变换器的变压器隔离版本。除了引入匝比以外,变压器对传递函数\(G_{vd}(s)\)和\(G_{vg}(s)\)的影响可以忽略不计。例如,当全桥拓扑的变压器对称驱动时,其励磁电感不会对变换器的小信号传递函数产生动态影响。同样,当正激变换器的励磁电感由输入电压重置(如图6.24或6.29),那么其影响也可以忽略不计。在所有基于buck,boost和Buck-boost的变压器隔离式变换器中,输入-输出传递函数中应该乘以变压器匝比。(8.147)和(8.148)的传递函数以及表8.2列出的参数可以直接使用。
8.2.3 变换器传递函数中RHP零点的物理来源
图8.37包含了说明右半平面零点特性的框图。在低频段,\((s/\omega_{z})\)具有可忽略的幅值,因此\(u_{out} \approx u_{in}\)。在高频段\((s/\omega_{z})\)幅值远大于1,\(u_{out} \approx -(s/\omega_{z})u_{in}\)。负号会导致高频的相位反转。对瞬态响应的影响是:输出的初值趋向于终值的反方向。
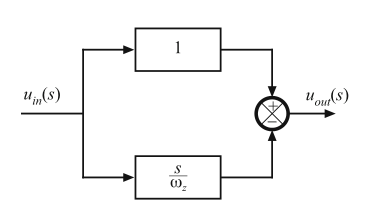
Fig. 8.37 Block diagram having a right half-plane zero transfer function, as in Eq. (8.32), with \(ω_0= ω_z\)
我们已经知道,如图8.38所示的boost和Buck-boost变换器的控制-输出传递函数存在RHP零点。占空比阶跃变化的典型瞬态响应波形如图8.39所示。对于这个例子,变换器最初在\(d=0.4\)和\(d^{'}=0.6\)的稳态下工作。图中给出了稳态电感电流\(i_{L}(t)\),输出电压\(v(t)\)以及二极管电流\(i_{D}(t)\)。平均二极管电流为:
<i_{D}>_{T_{s}}=d^{'}<i_{L}>_{T_{s}} \tag{8.149}
\end{matrix}
\]
当变换器工作于稳态时,根据电容电荷平衡,该平均二极管电流等于负载的直流电流。在\(t=t_{1}\)时,占空比增加到\(d=0.6\),\(d^{'}=0.4\)。由式(8.149)给出的平均二极管电流减小,输出电容开始放电。输出电压的幅值如图所示在最开始会下降。
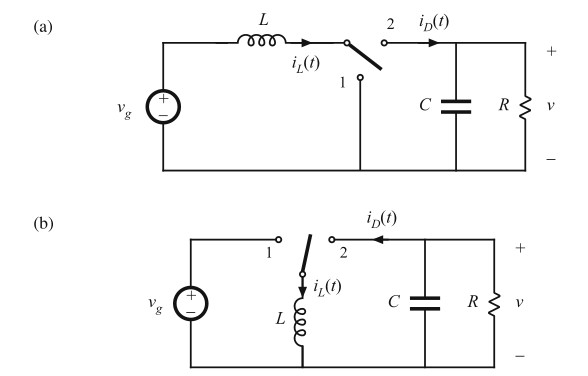
Fig. 8.38 Two basic converters whose CCM control-to-output transfer functions exhibit RHP zeroes: (a) boost, (b) buck–boost
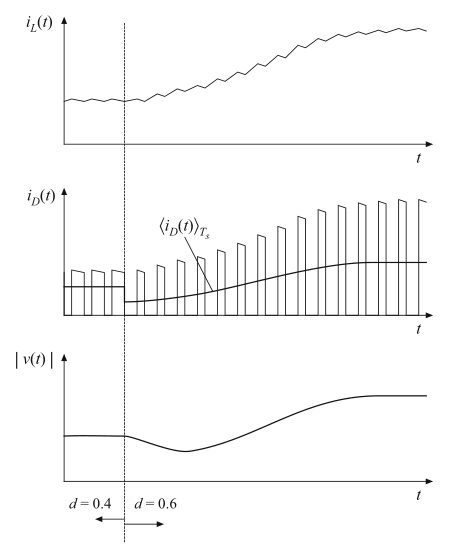
Fig. 8.39 Waveforms of the converters of Fig.8.38, for a step response in duty cycle. The average
diode current and output voltage initially decrease, as predicted by the RHP zero. Eventually, the inductor current increases, causing the average diode current and the output voltage to increase
增大的占空比使得电感电流缓慢增加,因此平均二极管电流最终将超过其在\(d=0.4\)时的平衡值。输出电压幅值最终会增加到对应于\(d=0.6\)时的新的平衡值。
右半平面零点的存在将会破坏较宽带宽的反馈回路的稳定性,因为在瞬态期间,输出值在开始会朝着错误的方向偏差。下一章将讨论用于反馈回路稳定性的相位裕度的测试。当右半平面零点存在时,在具有比较宽带宽的常规单环反馈系统中很难获得足够的相位裕量。右半平面零点的预测以及为什么控制CCM的boost和Buck-boost变换器的反馈环路将趋于振荡的解释是平均变换器建模的早期贡献之一。
[Fundamental of Power Electronics]-PART II-8. 变换器传递函数-8.2 变换器传递函数分析的更多相关文章
- [Fundamental of Power Electronics]-PART I-5.不连续导电模式-5.2 变比M分析
5.2 变比M分析 经过一些改进,第二章中的用于CCM稳态分析的相同技术和近似方法可以应用于DCM. (a)电感伏秒平衡.电感电压直流分量必须为0: \[<v_{L}>=\frac{1}{ ...
- [Fundamental of Power Electronics]-PART I-6.变换器电路-6.4 变换器评估与设计/6.5 重点与小结
6.4 变换器评估与设计 没有完美适用于所有可能应用场合的统一变换器.对于给定的应用和规格,应该进行折中设计来选择变换器的拓扑.应该考虑几种符合规格的拓扑,对于每种拓扑方法,对比较重要的量进行计算,比 ...
- [Fundamental of Power Electronics]-PART I-2.稳态变换器原理分析-2.1 引言
2.1 引言 在上一章中,介绍了降压变换器作为降低直流电压的一种方法,其仅使用非耗散开关,电感器和电容器.开关状态变换产生一个矩形波形\(v_{s}(t)\),如图2.1所示.当开关位于位置1时,该电 ...
- [Fundamental of Power Electronics]-PART I-5.不连续导电模式-5.3 Boost变换器实例
5.3 Boost变换器实例 作为第二个示例,考虑图5.12的Boost变换器.让我们来确定不同模式的边界并且求解DCM下的电压变换比.此前在2.3节中分析了在CCM工作的Boost变换器的特性,并确 ...
- [Fundamental of Power Electronics]-PART I-6.变换器电路-0 序
6 变换器电路 我们已经分析了包括buck,boost,buck-boost以及cuk电路,电压源逆变器等一系列电路的工作原理.利用这些变换器,可以执行许多不同的功能:降压,升压,极性反转以及直流交流 ...
- [Fundamental of Power Electronics]-PART I-6.变换器电路-6.1 电路演化
6.1 电路演化 第一章使用基本原理构建了buck变换器(图6.1).开关可以降低电压直流分量,低通滤波器可消除开关纹波.在CCM下,buck变换器的变换比为\(M=D\).buck变换器是最简单的, ...
- [Fundamental of Power Electronics]-PART I-6.变换器电路-6.2 变换器简单罗列
6.2 变换器简单罗列 变换器的数量可能有无穷种,因此将其全部列出是不可能的.这里给出了一个简单的罗列清单. 首先考虑含单个电感的单输入单输出变换器的类别.可以在电源和负载之间进行连接电感的方法数量是 ...
- [Fundamental of Power Electronics]-PART I-6.变换器电路-6.3 变压器隔离
6.3 变压器隔离 在许多应用场合中,期望将变压器结合到开关变换器中,从而在变换器的输入输出之间形成直流隔离.例如,在离线(off-line)应用中(变换器输入连接到交流公用系统),根据监管部门要求, ...
- [Fundamental of Power Electronics]-PART II-8. 变换器传递函数-8.1 Bode图回顾
8.0 序 工程设计过程主要包括以下几个过程: 1.定义规格与其他设计目标 2.提出一个电路.这是一个创造性的过程,需要利用工程师的实际见识和经验. 3.对电路进行建模.变换器的功率级建模方法已经在第 ...
随机推荐
- git 强制提交 & 覆盖 origin/master
git 强制提交 & 覆盖 origin/master git 强制提交本地分支覆盖远程分支 # git push origin 分支名 --force # local $ git push ...
- 06.numpy聚合运算
>>> import numpy as np >>> L = np.random.random(100) >>> L array([0.82846 ...
- node_puppeteer无界爬虫
环境:node----v14.5.0 vscode----2019 依赖库 (需要自行设置好目录结构,否则会报目录错误) const puppeteer = require("puppete ...
- Why GraphQL? 6个问题
Why GraphQL? 6个问题 GraphQL, 是一个API的标准: specification. 对于每个新技术, 要搞清楚的6个问题: 1.这个技术出现的背景, 初衷, 要达到什么样的目标或 ...
- oracle之用户
命令都是在命令行窗口执行 创建用户 1)登陆管理员用户 sqlplus system/密码 sqlplus system/briup 注意不要以分号结尾 2)创建用户 create user 用户名 ...
- HashSet为什么可以有序输出?
首先HashSet是不保证有序,而不是保证无序,因为在HashSet中,元素是按照他们的hashCode值排序存储的.对于单个字符而言,这些hashCode就是ASCII码,因此,当按顺序添加自然数或 ...
- Python3.x 基础练习题100例(51-60)
练习51: 题目: 学习使用 按位与(&) . 分析: 0&0=0; 0&1=0; 1&0=0; 1&1=1. 程序: if __name__ == '__ma ...
- 在windows上安装MySQL数据库注意点及Navicat Premium 15的破解
在windows上安装MySQL数据库 跟随慕课网教程(http://www.imooc.com/wiki/mysqllesson/mysqlwindows.html)下载安装MySQL: 其中注意 ...
- 初探JavaScript原型链污染
18年p师傅在知识星球出了一些代码审计题目,其中就有一道难度为hard的js题目(Thejs)为原型链污染攻击,而当时我因为太忙了(其实是太菜了,流下了没技术的泪水)并没有认真看过,后续在p师傅写出w ...
- git的回滚与撤销【reset and revert】
git的工作流程-- 3个区域 工作区:我们可以看到的文件内容 在操作 git add 之前的!! 缓存区:是不可见的 已经git add操作,还没git commit -m "" ...