奇异值分解SVD
在介绍奇异值分解(SVD)之前我们先来回顾一下关于矩阵的一些基础知识。
矩阵基础知识
方阵
给定一个$ n×m $的矩阵$ A $,若n和m相等也就是矩阵的行和列相等那矩阵$ A $就是一个方阵。
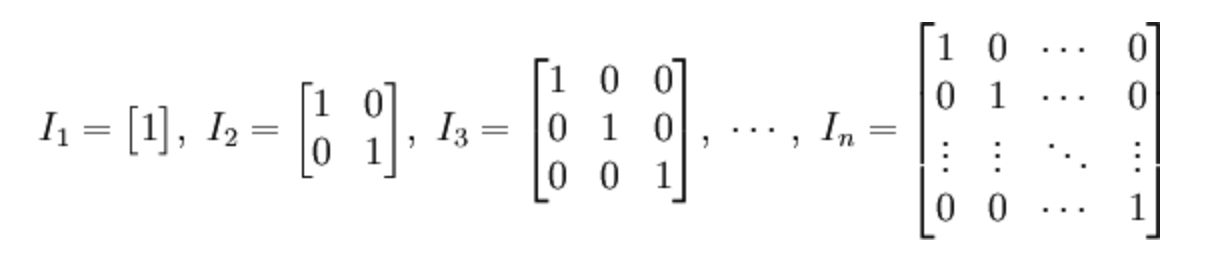
单位矩阵
在线性代数中,n阶单位矩阵,是一个$ n×n $的方阵,其主对角线元素为1,其余元素为0。单位矩阵以$ mathbf { I } _ { n } $表示。
单位矩阵性质:
$$
text { 1. } I _ { n } B _ { n times m } = B _ { n times m }
$$
$$
text { 2. } B _ { n times m } I _ { m } = B _ { n times m }
$$
$$
text { 3. } A _ { n } I _ { n } = I _ { n } A _ { n } = A _ { n }
$$
$$
text { 4. } I _ { n } I _ { n } = I _ { n }
$$
转置
矩阵的转置是最简单的一种矩阵变换。简单来说若$ n×m $的矩阵$ A $的转置为$ A ^ { mathrm { T } } $,则$ A ^ { mathrm { T } } $是一个$ m×n $的矩阵并且有$ mathbf { A } _ { i j } = mathbf { A } _ { j i } ^ { mathrm { T } } $。矩阵的转置相当于将矩阵按照主对角线翻转;同时,我们不难得出$ mathbf { A } = left( mathbf { A } ^ { top } right) ^ { top } $。
矩阵的逆
逆矩阵:在线性代数中,给定一个n阶方阵$ A $,若存在n阶方阵$ B $使得$ mathbf { A B } = mathbf { B } mathbf { A } = mathbf { I } _ { n } $,其中$ mathbf { I } _ { n } $是n阶单位矩阵,则称$ A $是可逆的且$ B $是$ A $的逆矩阵记作$ A ^ { -1 } $。
只有方阵才可能但非必然有逆矩阵,若方阵$ A $的逆矩阵存在则称$ A $为非奇异方阵或可逆方阵。
逆矩阵性质:
$$
text { 1. } left( A ^ { - 1 } right) ^ { - 1 } = A
$$
$$
text { 2. } ( lambda A ) ^ { - 1 } = frac { 1 } { lambda } times A ^ { - 1 }
$$
$$
text { 3. } ( A B ) ^ { - 1 } = B ^ { - 1 } A ^ { - 1 }
$$
$$
text { 4. } left( A ^ { mathrm { T } } right) ^ { - 1 } = left( A ^ { - 1 } right) ^ { mathrm { T } }
$$
正交矩阵
正交矩阵是一个方阵$ Q $,其元素为实数并且行和列都为正交的单位向量,使得该矩阵的转置矩阵为其逆矩阵:
$$
Q ^ { T } = Q ^ { - 1 } Leftrightarrow Q ^ { T } Q = Q Q ^ { T } = I
$$
其中$ I $是单位矩阵。
酉矩阵
矩阵U为酉矩阵当且仅当其共轭转置$ boldsymbol { U } ^ { dagger } $为其逆矩阵:
$$
U ^ { - 1 } = U ^ { dagger }
$$
若酉矩阵的元素都是实数,其即为正交矩阵。
对称矩阵
对称矩阵是一个方阵,其转置矩阵和自身相等:
$$
A = A ^ { mathrm { T } }
$$
对角矩阵
对角矩阵是一个主对角线之外的元素皆为0的方阵。对角线上的元素可以为0或其他值。对角矩阵都是对称矩阵。
可对角化矩阵
对角化:若方阵$ A $相似于对角矩阵,即存在可逆矩阵$ P $和对角矩阵$ Σ $,有$ A = P Σ P ^ { - 1 } $,则称A可对角化。
可对角化的充分必要条件:
$ n×n $阶矩阵$ A $可对角化的充分必要条件是矩阵$ A $有n个线性无关的特征向量。
特征值分解
特征值与特征向量
对于一个给定的方阵$ A $,它的特征向量$ v $经过这个线性变换之后,得到的新向量仍然与原来的$ v $保持在同一条直线上,但其长度或方向也许会改变。即:
$$
A v = lambda v
$$
$ lambda $为标量,即特征向量的长度在该线性变换下缩放的比例,称$ lambda $为其特征值。反过来,一个实数$ lambda $是矩阵$ A $的一个特征值,当且仅当有一个非零向量$ v $满足上面的式子。
如果特征值为正,则表示$ v $在经过线性变换的作用后方向也不变;如果特征值为负,说明方向会反转;如果特征值为0,则是表示缩回零点。但无论怎样,仍在同一条直线上。
特征值分解
令$ A $是一个$ n×n $的方阵并且有n个线性无关的特征向量$ q _ { i } ( i = 1 , dots , N ) $,这样A可以被分解为:
$$
A = Q Sigma Q ^ { - 1 }
$$
其中,$ Q $是一个$ n×n $的方阵并且是由矩阵$ A $的特征向量组成的矩阵,$ Σ $是对角矩阵,其对角线元素为对应的特征值即$ Σ _ { i i } = lambda _ { i } $,里面的特征值是由大到小排列的。也就是说矩阵A的信息可以由其特征值和特征向量表示。
这里需要注意只有可对角化矩阵才可以作特征分解。
特征值分解可以得到特征值与特征向量,特征值表示的是这个特征到底有多重要,而特征向量表示这个特征是什么。
奇异值分解(SVD)
特征值分解的第一个要求就是需要矩阵是方阵,这个要求是很高的。对于一个$ n×m $的普通矩阵来说是否也可以像可对角化矩阵那样进行类似的特征值分解呢。奇异值分解(SVD)就是对普通矩阵做分解的一种方法。
假设$ M $是一个$ n×m $阶矩阵,其中的元素全部属于域$ K $,也就是实数域$ R $或复数域$ C $。如此则存在一个分解使得:
$$
M = U Sigma V ^ { T }
$$
其中$ M $是$ n×n $阶酉矩阵,$ Σ $是$ n×m $阶非负实数对角矩阵,$ V ^ { T } $是$ V $的转置,是$ m×m $阶酉矩阵。这样的分解就称作$ M $的奇异值分解。$ Σ $对角线上的元素$ Σ _ {i,i}$即为$ M $的奇异值。$ U $和$ V $分别是$ A $的左右奇异向量矩阵。
常见的做法是将奇异值由大到小排列,这样$ Σ $便能由$ M $唯一确定了。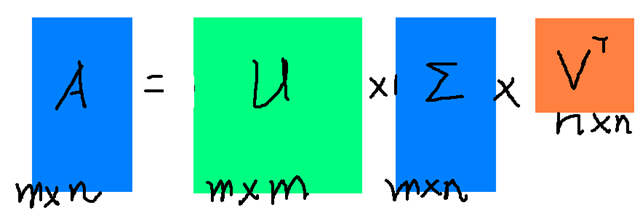
特征值分解和奇异值分解
首先,特征值只能作用在一个$ n×n $的方阵上,而奇异值分解则可以作用在一个$ n×m $的普通矩阵上。
其次,奇异值分解同时包含了旋转、缩放和投影三种作用,$ U $和$ V $都起到了对$ M $旋转的作用,而$ Σ $起到了对$ M $缩放的作用。特征值分解只有缩放的效果。
不过,这两个分解之间是有关联的。给定一个$ M $的奇异值分解,根据上面的论述,两者的关系式如下:
$$
begin{aligned} M ^ { T } M & = V Sigma ^ { T } U ^ { T } U Sigma V ^ { T } = V left( Sigma ^ { T } Sigma right) V ^ { T } end{aligned}
$$
$$
begin{aligned} M M ^ { T } & = U Sigma V ^ { T } V Sigma ^ { T } U ^ { T } = U left( Sigma Sigma ^ { T } right) U ^ { T } end{aligned}
$$
关系式的右边描述了关系式左边的特征值分解。于是:
- $ V $的列向量(右奇异向量)是$ M ^ { T } M $的特征向量。
- $ U $的列向量(左奇异向量)是$ M M ^ { T } $的特征向量。
- $ Sigma $的非零对角元(非零奇异值)是$ M ^ { T } M $或者$ M M ^ { T } $的非零特征值的平方根。
SVD的低秩逼近
奇异值$ sigma $和特征值类似,在矩阵$ Sigma $中奇异籽是从大到小排列的而且$ sigma $降低的特别快,在大多数情况下前10%甚至1%的奇异值的和就占全部奇异值之和的99%以上,也就是说我们可以用前r大的奇异值来近似描述矩阵,如下:
$$
A _ { m x n } approx U _ { n x r } Sigma _ { r x r } V _ { r times n } ^ { T }
$$
其中r是一个远小于m和n的数字,这样矩阵乘法看起来就是下面这个样子: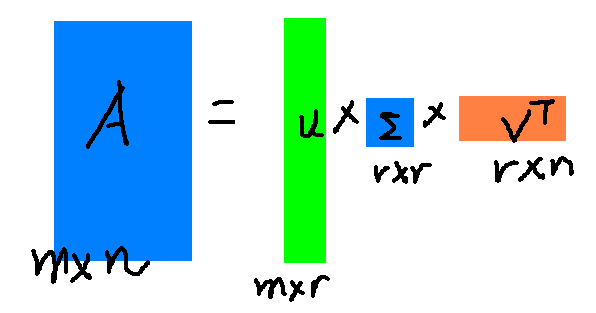
右边的三个矩阵相乘结果将会是一个接近$ A $的矩阵,r越接近n相乘的结果越接近$ A $。如果我们想要压缩空间来表示原矩阵$ A $,我们存下矩阵$ U , Sigma , V $就好。
SVD矩阵压缩
|
|
new_arr与arr非常接近,几乎相等。这其实是类似于图像压缩,只保留图像分解后的两个方阵和一个对角阵的对角元素,就可以恢复原图像。
SVD矩阵降维与主成分分析(PCA)
PCA就是在原始的空间中顺序地找一组相互正交的坐标轴。第一个轴是使得方差最大的,第二个轴是在与第一个轴正交的平面中使得方差最大的,第三个轴是在与第1、2个轴正交的平面中方差最大的,这样假设在N维空间中,我们可以找到N个这样的坐标轴,我们取前r个去近似这个空间,这样就从一个N维的空间压缩到r维的空间了。我们选择的r个坐标轴对空间进行压缩使得数据的损失最小。
将一个$ n times m $的矩阵变换成一个$ n times r $的矩阵(r < m),这样我们就可以对列进行压缩:
$$
A _ { n times m } P _ { m times r } = widetilde { A } _ { n times r }
$$
以上就是PCA的表达公式。但是这和SVD有什么关系呢?我们知道SVD得到的奇异值也是从大到小排列的,按PCA的观点来看就是方差最大的坐标轴就是第一个奇异向量,方差次大的坐标轴就是第二个奇异向量…我们回忆一下之前得到的SVD式子:
$$
A _ { n x m } approx U _ { n times r } Sigma _ { r times r } V _ { r times m } ^ { T }
$$
在矩阵两边同时乘上一个矩阵$ V $得到:
$$
A _ { n times m } V _ { m times r } approx U _ { n times r } Sigma _ { r x r } V _ { r times m } ^ { T } V _ { m times r }
$$
$$
A _ { n times m } V _ { m times r } approx U _ { n times r } Sigma _ { r x r }
$$
其中$ V $就是上面PCA公式中的$ P $,这里是将一个$ n times m $的矩阵变换到一个$ n times r $的矩阵也就是对列进行压缩。其实我们也可以对行进行压缩:
$$
U _ { r times n } ^ { T } A _ { n times m } approx Sigma _ { r times r } V _ { r times m } ^ { T }
$$
可以看出,其实PCA几乎可以说是对SVD的一个包装,如果我们实现了SVD也就实现了PCA,而且更好的地方是,有了SVD我们就可以得到两个方向的PCA。
|
|
奇异值分解SVD的更多相关文章
- 矩阵奇异值分解(SVD)及其应用
机器学习中的数学(5)-强大的矩阵奇异值分解(SVD)及其应用(好文) [简化数据]奇异值分解(SVD) <数学之美> 第15章 矩阵运算和文本处理中的两个分类问题
- 转载:奇异值分解(SVD) --- 线性变换几何意义(下)
本文转载自他人: PS:一直以来对SVD分解似懂非懂,此文为译文,原文以细致的分析+大量的可视化图形演示了SVD的几何意义.能在有限的篇幅把这个问题讲解的如此清晰,实属不易.原文举了一个简单的图像处理 ...
- 特征值分解与奇异值分解(SVD)
1.使用QR分解获取特征值和特征向量 将矩阵A进行QR分解,得到正规正交矩阵Q与上三角形矩阵R.由上可知Ak为相似矩阵,当k增加时,Ak收敛到上三角矩阵,特征值为对角项. 2.奇异值分解(SVD) 其 ...
- 奇异值分解(SVD) --- 几何意义
原文:http://blog.sciencenet.cn/blog-696950-699432.html PS:一直以来对SVD分解似懂非懂,此文为译文,原文以细致的分析+大量的可视化图形演示了SVD ...
- [机器学习笔记]奇异值分解SVD简介及其在推荐系统中的简单应用
本文先从几何意义上对奇异值分解SVD进行简单介绍,然后分析了特征值分解与奇异值分解的区别与联系,最后用python实现将SVD应用于推荐系统. 1.SVD详解 SVD(singular value d ...
- 【转载】奇异值分解(SVD)计算过程示例
原文链接:奇异值分解(SVD)的计算方法 奇异值分解是线性代数中一种重要的矩阵分解方法,这篇文章通过一个具体的例子来说明如何对一个矩阵A进行奇异值分解. 首先,对于一个m*n的矩阵,如果存在正交矩阵U ...
- 一步步教你轻松学奇异值分解SVD降维算法
一步步教你轻松学奇异值分解SVD降维算法 (白宁超 2018年10月24日09:04:56 ) 摘要:奇异值分解(singular value decomposition)是线性代数中一种重要的矩阵分 ...
- 机器学习实战(Machine Learning in Action)学习笔记————10.奇异值分解(SVD)原理、基于协同过滤的推荐引擎、数据降维
关键字:SVD.奇异值分解.降维.基于协同过滤的推荐引擎作者:米仓山下时间:2018-11-3机器学习实战(Machine Learning in Action,@author: Peter Harr ...
- 用 GSL 求解超定方程组及矩阵的奇异值分解(SVD)
用 GSL 求解超定方程组及矩阵的奇异值分解(SVD) 最近在学习高动态图像(HDR)合成的算法,其中需要求解一个超定方程组,因此花了点时间研究了一下如何用 GSL 来解决这个问题. GSL 里是有最 ...
- 奇异值分解(SVD)原理详解及推导(转载)
转载请声明出处http://blog.csdn.net/zhongkejingwang/article/details/43053513 在网上看到有很多文章介绍SVD的,讲的也都不错,但是感觉还是有 ...
随机推荐
- 吴裕雄--天生自然Linux操作系统:Linux 系统目录结构
登录系统后,在当前命令窗口下输入命令: ls / 你会看到如下图所示: 树状目录结构: 以下是对这些目录的解释: /bin:bin是Binary的缩写, 这个目录存放着最经常使用的命令. /boot: ...
- PAT Basic 1083 是否存在相等的差 (20) [hash映射,map STL]
题目 给定 N 张卡⽚,正⾯分别写上 1.2.--.N,然后全部翻⾯,洗牌,在背⾯分别写上 1.2.--. N.将每张牌的正反两⾯数字相减(⼤减⼩),得到 N 个⾮负差值,其中是否存在相等的差? 输⼊ ...
- python计算网络借贷和分期的年利率
一.现金分期年利率 现在很多人都有使用网上借贷,动不动就消费分期.经过了解很多对贷款利率有一些误解,粗看觉得产生的利息也不是很高,但是年化利率到第是多少,这里面的玩法是怎样的呢. 拿某个借贷平台举例, ...
- 通过OAuth2.0 获取授权访问SF 用户数据
站长资讯: 创建应用程序 新建应用程序 访问示例(Python+django) 环境准备: index.html 两种方式: 方式一:采用由用户授权,调用者无需知道SF的用户名与密码 方式二:直接 ...
- 1016D.Vasya And The Matrix#矩阵存在
题目出处:http://codeforces.com/contest/1016/problem/D #include<iostream> #define ll long long int ...
- 剑指offer【10】- 变态跳台阶
题目:一只青蛙一次可以跳上1级台阶,也可以跳上2级……它也可以跳上n级.求该青蛙跳上一个n级的台阶总共有多少种跳法. 关于本题,前提是n个台阶会有一次n阶的跳法.分析如下: f(1) = 1 f(2) ...
- 八、Shell脚本高级编程实战第八部
一.使用for循环在/oldboy目录下创建10个文件名为oldboy-x的文件 #!/bin/sh[ ! -d /oldboy ] && mkdir -p /oldbfor i in ...
- 解决UITextView无法滚到底部
程序中有一个UITextView控件 @property (weak, nonatomic) IBOutlet UITextView *textView; 一般情况下,以下代码可实现UITextVie ...
- soap,restful 两种web service实现方式比较
web service服务 目前常用的实现web service的方式有有两种 1.SOAP 原始的web service标准,一堆标准,不过这些标准是在开发框架中实现的,有上层接口,可以调用 2.R ...
- Java中使用PrepateStatement并且like模糊查询
在使用PreparedStatement进行模糊查询的时候废了一番周折,以前一直都没有注意这个问题.一般情况下我们进行精确查询,sql语句类似:select * from table where na ...