ROS笔记——创建简单的主题发布节点和主题订阅节点
在安装好ROS后,接着学习如何创建节点和节点之间的通信方式,以一个简单的主题发布节点和主题订阅节点说明。
节点是连接ROS网络等可执行文件,是实现某些功能的软件包,也是一个主要计算执行的进程。
一、创建工作空间
创建新文件夹,名字自定义,路径也根据自己设定。
cd ~
mkdir -p ros_workspace
创建好后,就需要将次路径添加到ROS_PACKAGE_PATH中。
查看目前ROS的工作空间,
echo $ROS_PACKAGE_PATH
一般显示如下:
/opt/ros/kinetic/share
下面将路径添加到~/.bashrc中
echo "export ROS_PACKAGE_PATH=~/ros_workspace:${ROS_PACKAGE_PATH}" >> ~/.bashrc
. ~/.bashrc
再次查看ROS正在使用的空间,确保路径正确添加。
二、创建ROS功能包
打开ROS工作目录:
cd ~/ros_workspace
在该目录下创建功能包:
roscreate-pkg test1_tutorials std_msgs rospy roscpp
功能包文件夹下一般包括Makefile、manifest.xml、CMakeLists.txt、mainpage.dox等文件。
std_msgs 包含常见等消息类型
rospy py库
roscpp cpp库
运行命令,查看功能包是否创建
rospack find test1_tutorials
三、编写代码
1、主题发布节点
在功能包中创建src/test1_a.cpp,并添加代码:
#include "ros/ros.h"
#include "std_msgs/String.h"
#include <sstream> int main(int argc, char **argv)
{
ros::init(argc,argv,"test1_a");
ros::NodeHandle n;
ros::Publisher chatter_pub = n.advertise<std_msgs::String>("message",);
ros::Rate loop_rate();
while(ros::ok()) {
std_msgs::String msg;
std::stringstream ss;
ss << "Hello test1_b! I am test1_a.";
msg.data = ss.str();
ROS_INFO("%s",msg.data.c_str());
chatter_pub.publish(msg);
ros::spinOnce();
loop_rate.sleep();
}
return ;
}
第8行: 初始化,其中第三个参数是节点名称,在ROS系统中必须唯一。
第10行:声明主题message上发布一个消息类型为str_msgs::String的消息,并设置消息缓冲区的大小。
第11行:设置发送消息的频率 10HZ,它追踪自从上一次Rate::sleep()被唤醒之后的持续时间,并在到达时间后继续休眠。
第12行:ros::ok()函数返回值,在下列情况返回false。
- SIGINT句柄接收到Ctrl+C命令来结束;
- 被名称相同的节点提出ROS网络;
- ros::shutdown()被应用的另一部分唤醒。
第18行:把消息通过主题发布出去。
第19行:和下面test1_b.cpp程序ros::spin()进行对比,参考http://www.yfworld.com/?p=2318
2、主题订阅节点
在功能包中创建src/test1_b.cpp,并添加代码:
#include "ros/ros.h"
#include "std_msgs/String.h" void chatterCallback(const std_msgs::String::ConstPtr &msg)
{
ROS_INFO("Hello test1_a! I am test1_b. I heard:[%s]",msg->data.c_str());
} int main(int argc, char **argv)
{
ros::init(argc,argv,"test1_b");
ros::NodeHandle n;
ros::Subscriber sub = n.subscribe("message",,chatterCallback);
ros::spin(); return ;
}
第4-7行:回调函数,当一个新消息到达指定主题时即调用。
第17行:第一个参数指定订阅主题;第二个参数设置消息缓冲区的大小;第三个参数指定回调函数。
订阅节点需要做四件事情:
1)初始化;
2)从主题订阅消息;
3)然后等待消息到达;
4)当消息到达时,chatterCallback()被回调。
四、编译节点
编辑CMakeLists.txt文件,在末尾处添加如下代码:
rosbuild_add_executable(test1_a src/test1_a.cpp)
rosbuild_add_executable(test1_b src/test1_b.cpp)
rosmake工具进行编译:
rosmake test1_tutorials
五、运行功能包
在运行功能包前,请确认节点管理器已经打开。使用下面的命令运行:
roscore
在不同的终端窗口分别运行:
rosrun test1_tutorials test1_a
rosrun test1_tutorials test1_b
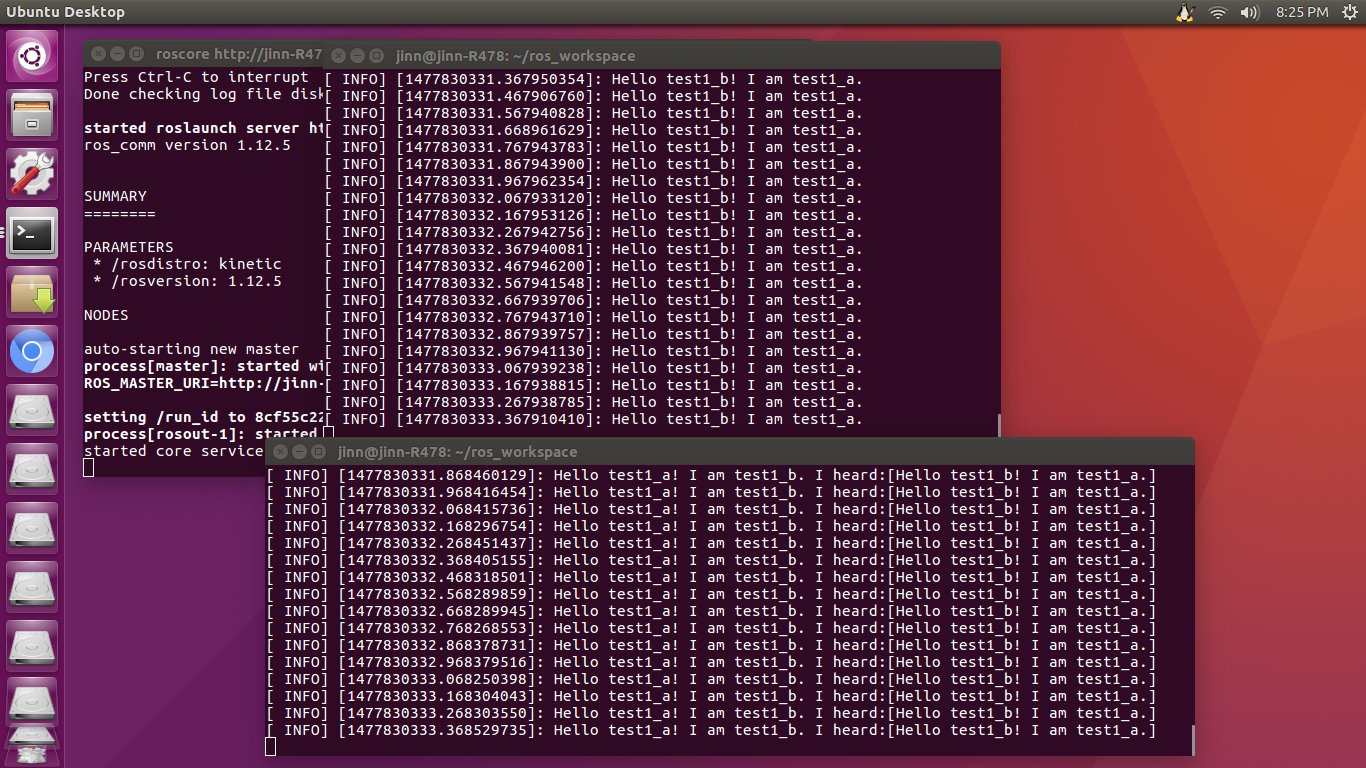
可以看到以下信息:
六、参考
http://wiki.ros.org/ROS/Tutorials
《ROS机器人程序设计》 刘品杰 译
(欢迎转载,转载请注明出处。)
ROS笔记——创建简单的主题发布节点和主题订阅节点的更多相关文章
- Web Service 的创建简单编码、发布和部署
最近,老大准备将已有的C/S架构项目中的通信部分做成通用,需要将其支持WebService为以后项目向着B/S架构升级做好铺垫,为此身为屌丝的我去各种百度WebService是个什么卵玩意,然后逐渐搭 ...
- Robot Operating System (ROS)学习笔记---创建简单的机器人模型smartcar
搭建环境:XMWare Ubuntu14.04 ROS(indigo) 转载自古月居 转载连接:http://www.guyuehome.com/243 一.创建硬件描述包 已创建catkin_ ...
- Angular5学习笔记 - 创建、运行、发布项目(一)
一.安装脚手架 npm install -g cnpm --registry=https://registry.npm.taobao.org #安装阿里镜像 npm install -g @angul ...
- ROS学习记录(三)————创建一个简单的发布节点和订阅节点
暑假在家有些懈怠,不,非常懈怠- -||!良心已经发痛了,想快些补回原来的进度,但忽然发现,中断了一段时间再重新去学习,有的地方连最基本的符号都忘记了 ,这次特意弄个最最基础的,恢复一下,以前的进度. ...
- ROS主题发布订阅
节点是一个可执行程序,它连接到了ROS的网络系统中.我们将会创建一个发布者,也就是说话者节点,它将会持续的广播一个信息. 改变目录到之前所建立的那个包下: cd ~/catkin_ws/src/beg ...
- SLAM+语音机器人DIY系列:(二)ROS入门——5.编写简单的消息发布器和订阅器
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- ROS-4 : ROS节点和主题
依照<ROS-3 : Catkin工作空间和ROS功能包>,创建catkin工作空间,并在起src下创建功能包ros_demo_pkg,依赖项为roscpp.std_msgs.action ...
- Ros学习——C++发布器publisher和订阅器subscriber
1.编写发布器 初始化 ROS 系统 在 ROS 网络内广播我们将要在 chatter 话题上发布 std_msgs/String 类型的消息 以每秒 10 次的频率在 chatter 上发布消息 在 ...
- Spark学习笔记0——简单了解和技术架构
目录 Spark学习笔记0--简单了解和技术架构 什么是Spark 技术架构和软件栈 Spark Core Spark SQL Spark Streaming MLlib GraphX 集群管理器 受 ...
随机推荐
- EX14 彩票中奖 (lottery.pas/c/cpp)
[题目描述]小明想试试运气去购买彩票,所以他开始研究彩票大乐透的玩法:超级大乐透是指由购买者从01—35共35个号码中选取5个号码为前区号码,并从01—12共12个号码中选取2个号码为后区号码组合为一 ...
- 遗传算法在JobShop中的应用研究(part 7:整体流程)
""" pop是种群,种群中的每个个体的形式是,(makespan, 染色体)""" pop = [(ComputeStartTimes(g ...
- Mybaits使用
一.多数据源问题 主要思路是把dataSource.sqlSesstionFactory.MapperScannerConfigurer在配置中区分开,各Mapper对应的包名.类名区分开 1 < ...
- underscore api
http://files.cnblogs.com/files/hwd13/underscore.rar
- avalon复杂绑定
样式操作:ms-css-样式名=“样式值”,ms-class ms-css-width="prop"(自动补px) ms-css-height="{{prop}}%&qu ...
- hadoop修改MR的提交的代码程序的副本数
hadoop修改MR的提交的代码程序的副本数 Under-Replicated Blocks的数量很多,有7万多个.hadoop fsck -blocks 检查发现有很多replica missing ...
- CSS选择器详解
选择器是CSS的核心,从最初的元素.class/id选择器,演进到伪元素.伪类,以及CSS3中提供的更丰富的选择器,定位页面上的任意元素开始变得愈发的简单. 1.元素选择器 这是最基本的CSS选择器, ...
- Java抛出OutOfMemoryError:Java heap space堆内存溢出错误的分析方案
抛出堆内存溢出的错误一定要记得保留现场环境(导出堆内存信息到文件),否则如果无法进行分析,并从根本上解决问题,下次很有可能还会出现. 第一步:导出堆转储文件 我们可以使用Jdk自带的jmap工具.使用 ...
- mysql安装,配置。
看到百度经验上有一篇文章比较好,后来发现是舍友写的,他同意后,便复制到我的博客园中,希望更多小白看到,原地址:http://jingyan.baidu.com/article/597035521d5d ...
- 参考__CSS参考
库 CsshakeAnimate.css